SPF.pdf - 第92页
SPF 服务手册 5.1 调整 AC 伺服增益 5.1-5 P54SCC-84- 040-A0 6. 监控器上显示如下“菜单”画面。 MANUAL : 1BLOCK <<MACHINE INITIAL SETTING>> XXXX-XX-XX XX : XX F 1 F 2 F 3 F 4 F 5 F 6 F 7 F 8 RAM INITIAL [MENU] SYSTEM PARAM DRIVER GAIN SE…
SPF
服务手册
5.1 调整 AC 伺服增益
P54SCC-84-040-A0 5.1-4
►调整
调整调整
调整 AC 伺服增益
伺服增益伺服增益
伺服增益
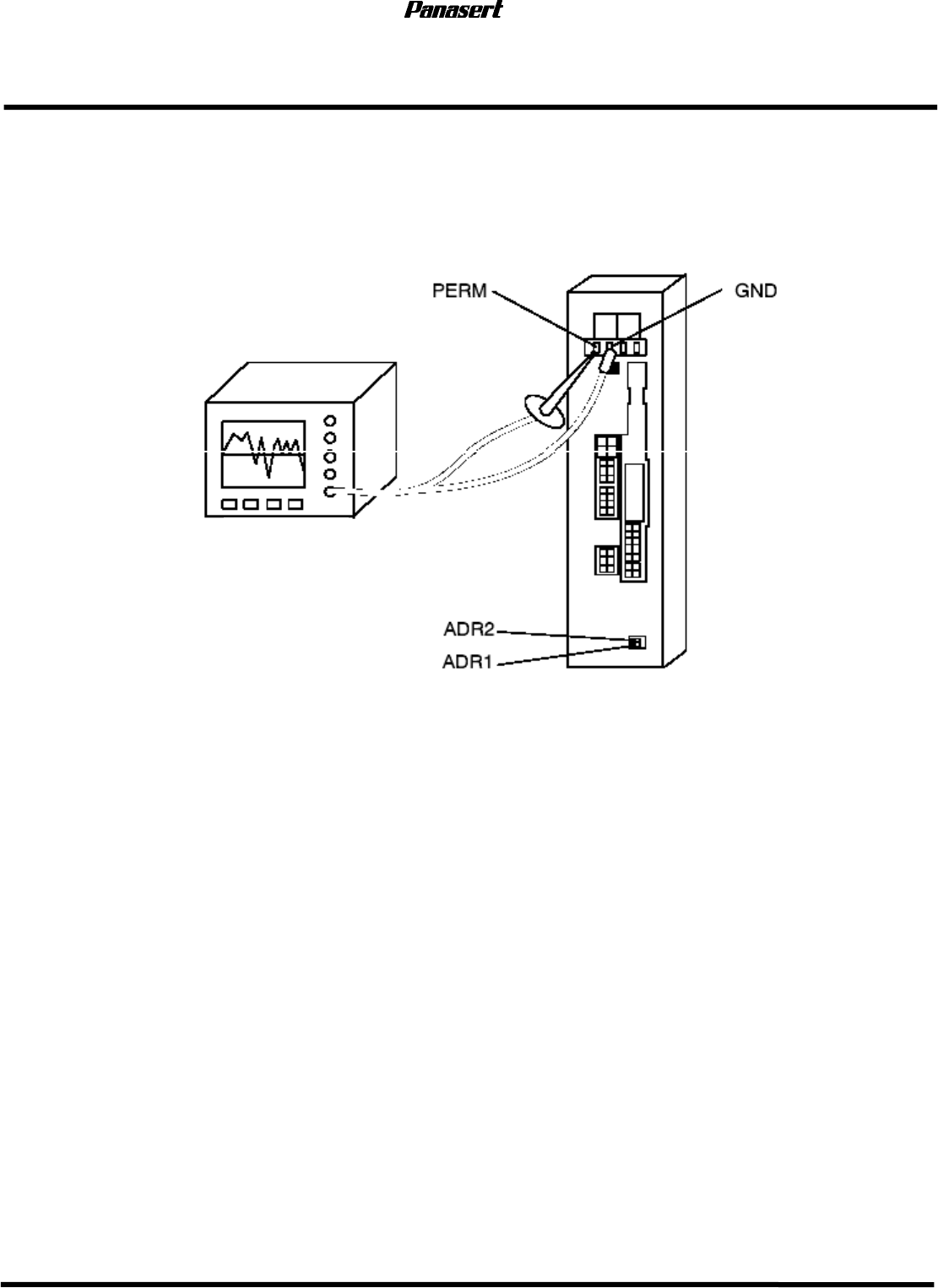
1. 由其它机器向示波器供电的而不是不是 SPF 本体。
2. 将示波器的测针连接到电机驱动器监控器终端的“PERM”和“GND”上。
示波器
3. 选择程序。
=提示
提示提示
提示=
在正常条件下,任何程序都可使用。
4. 在评价模式中,执行程序,用示波器确认 AC 伺服驱动器的波形和伺服电机的状态。
5. 选择主操作盘上的“F1”(机器初始设定)→“F7” →“SHIFT” →“S” →“P”
→“SHIFT”→“F”。
SPF
服务手册
5.1 调整 AC 伺服增益
5.1-5 P54SCC-84-040-A0
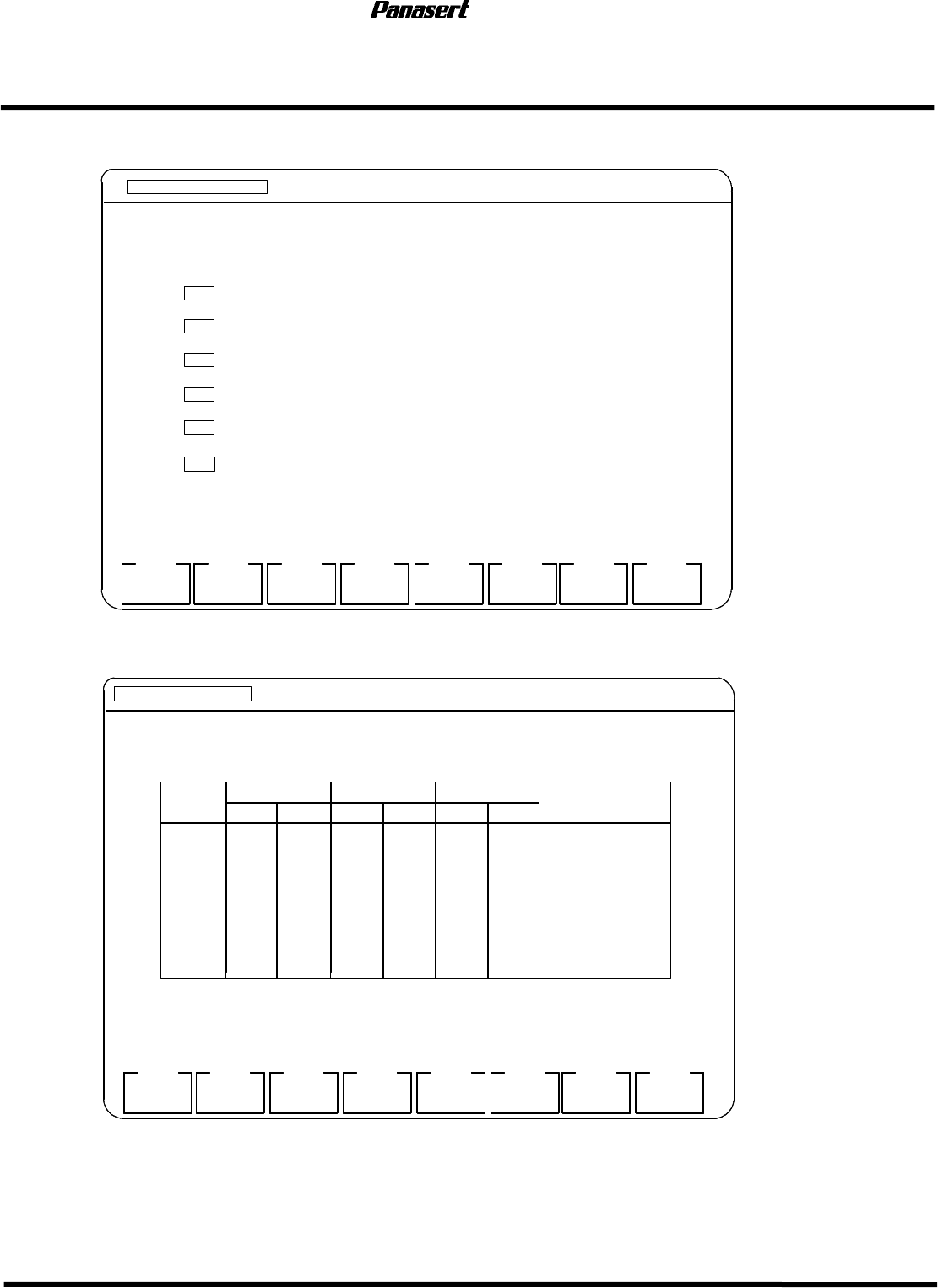
6. 监控器上显示如下“菜单”画面。
MANUAL : 1BLOCK
<<MACHINE INITIAL SETTING>>
XXXX-XX-XX XX : XX
F 1
F 2 F 3 F 4 F 5 F 6
F 7 F 8
RAM
INITIAL
[MENU]
SYSTEM
PARAM
DRIVER GAIN
SET
OPTION
SWITCH
EXIT
SELECT FUNCTION USING F KEYS.
F 1
INITIALIZES RAM AREA
F 2 SETS SYSTEM PARAMETER (RS-232C SETTING, SOFT SW)
F 3 SETS SC TIMER
F 4
SETS DRIVER GAIN
F 5
SETS OPTION SWITCHES
SC TIMER
SET
F 6
SETS MACHINE PARAMETERS
MACHIN
PARAM
MORE
FUNCTION
7. 选择“F4”(驱动器增益设定)。
MANUAL : 1BLOCK
<<MACHINE INITIAL SETTING>>
XXXX-XX-XX XX:XX
F 1
F 2 F 3 F 4 F 5 F 6 F 7 F 8
[DRIVER GAIN SETTING]
EXIT
INITIAL
POSITION FEEDB.
FEED
FORWARD
SPEED FEEDBACK
INTEGRAL OF SPD
CHANGE
TIMING
DATA
TRANSFER
CX
CY
ST
SST
SCR
SCX
SY
SQ
9
8
28
12
4
3
8
10
20
13
28
9
2
3
4
9
20
20
21
20
20
5
1
1
0
0
0
0
0
0
0
0
9
8
28
12
5
4
8
10
20
13
28
9
3
4
10
9
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
0
1st 2nd 1st 2nd 1st 2nd
SPF
服务手册
5.1 调整 AC 伺服增益
P54SCC-84-040-A0 5.1-6
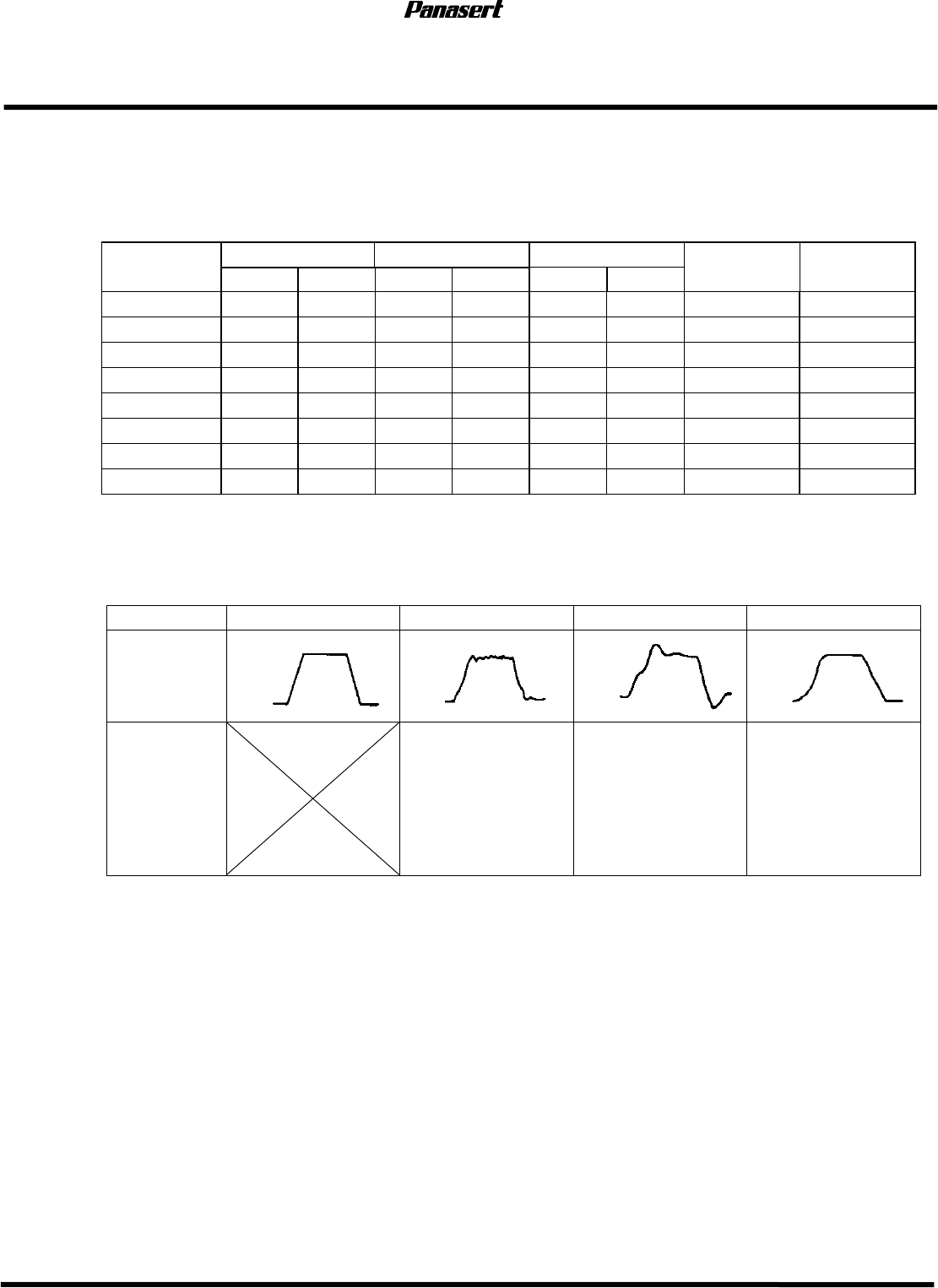
8. 确认增益设定值和标准增益设定值的差。
=参考
参考参考
参考=
请参照下表。
AC 伺服驱动器标准增益设定值
伺服驱动器标准增益设定值伺服驱动器标准增益设定值
伺服驱动器标准增益设定值
位置比例增益
位置比例增益位置比例增益
位置比例增益 速度比例增益
速度比例增益速度比例增益
速度比例增益 速度积分增益
速度积分增益速度积分增益
速度积分增益 增益
增益增益
增益
1st 2nd 1st 2nd 1st 2nd
前馈增益
前馈增益前馈增益
前馈增益 增益切换定时
增益切换定时增益切换定时
增益切换定时
CX 轴
轴轴
轴
9 9 20 20 0 20 0 0
CY 轴
轴轴
轴
8 8 13 13 0 20 0 0
ST 轴
轴轴
轴
28 28 28 28 0 21 0 0
SST 轴
轴轴
轴
12 12 9 9 0 20 0 0
SCR 轴
轴轴
轴
5 4 3 2 0 20 0 0
SCX 轴
轴轴
轴
4 3 4 3 0 5 0 0
SY 轴
轴轴
轴
8 8 10 4 0 1 0 0
SQ 轴
轴轴
轴
10 10 9 9 0 1 0 0
9. 根据下表,更改增益设定值。
=确认
确认确认
确认=
确认“前馈增益”的值为标准值。
电机状态
电机状态电机状态
电机状态 理想
理想理想
理想 发生噪音时
发生噪音时发生噪音时
发生噪音时 动作不顺利时
动作不顺利时动作不顺利时
动作不顺利时 定位精度低
定位精度低定位精度低
定位精度低
波形
波形波形
波形
调整步骤
调整步骤调整步骤
调整步骤
1. 降低速度比例增
益值。
2. 降低速度积分增
益值。
3. 降低位置比例增
益值。
1. 降低位置比例增
益值。
2. 提高速度比例增
益值。
3. 降低速度积分增
益值。
1. 提高位置比例增
益值。
2. 提高速度比例增
益值。
3. 提高速度积分增
益值。
10. 执行程序,比较电机波形和理想波形。
11. 波形状态不符合要求时,请再次调整。