节卡机器人-用户手册硬件部分.pdf - 第18页
JA 13 图 3- 6 JAKA MiniCob o 基座安装 尺寸图 3.2 .4 末 端工具安装 JAKA MiniCobo 机器人末端法 兰有四 个 M6 螺纹孔, 可用于将 工具连接到机 器人。安装时 推荐紧固螺钉 锁 紧,扭矩为 15.3N m 。若 需要 高精度紧固 工具时 还可 使用 ∅ 6mm 销钉孔。图 3-7 显示了 钻孔位置和螺 钉安装位 置,所有测量值 均以 mm 为单位。 图 3- 7 末端法兰安 装尺寸 图
JA
12
3.2
3.2.1 简要安装步骤
1.确定机器人的工作范围;
2.将机器人本体安装在底座上;
3.将所需工具安装在机器人末端。
3.2.2 重要安全说明
警告:
1.确保机械臂正确并安全地安装。
2.安装表面必须防震,并具有足够的承载能力。
警告:
1.确保工具正确安全地安装。
2.确保工具安全,不会有零件意外坠落造成危险。
警告:
1.确保控制器和电缆不接触液体,否则将有触电的风险。。
2.控制器不得长期暴露在灰尘、潮湿的或超出 IP20 等级的环境
中。
注意:
机器人不应安装在液体或潮湿环境中。
3.2.3 机器人本体安装
JAKA MiniCobo 机器人可以任意姿态安装。如图 3-5 是三种典型的安装方式:正装、倒装、侧装。
图 3-5 典型安装方式
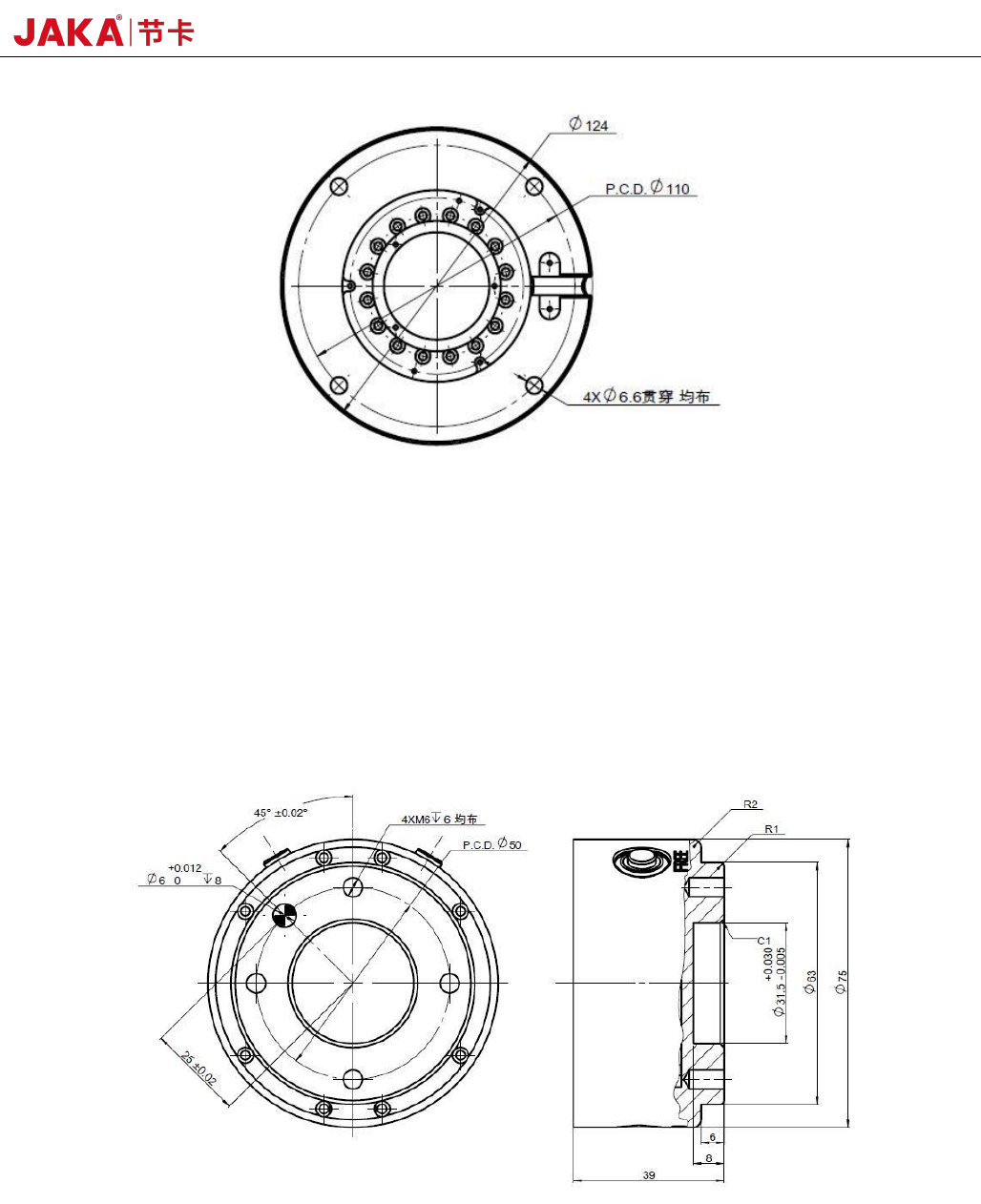
JAKA MiniCobo 使用 4 颗 M6 螺栓,通过机器人基座上的 4 个∅6.6mm 通孔来安装机器人。建议以 15.3Nm
扭矩紧固这些螺钉。请将机器人安装在一个坚固、平整的的基座上,该基座表面应当承受至少 612Nm 的扭矩,
以及至少 500N 的力。此外基座应隔振。图 3-6 显示了机器人安装孔。所有测量值均以 mm 为单位。
JA
13
图 3-6 JAKA MiniCobo 基座安装尺寸图
3.2.4 末端工具安装
JAKA MiniCobo 机器人末端法兰有四个 M6 螺纹孔,可用于将工具连接到机器人。安装时推荐紧固螺钉锁
紧,扭矩为 15.3Nm。若需要高精度紧固工具时还可使用∅6mm 销钉孔。图 3-7 显示了钻孔位置和螺钉安装位
置,所有测量值均以 mm 为单位。
图 3-7 末端法兰安装尺寸图
JA
14
3.3
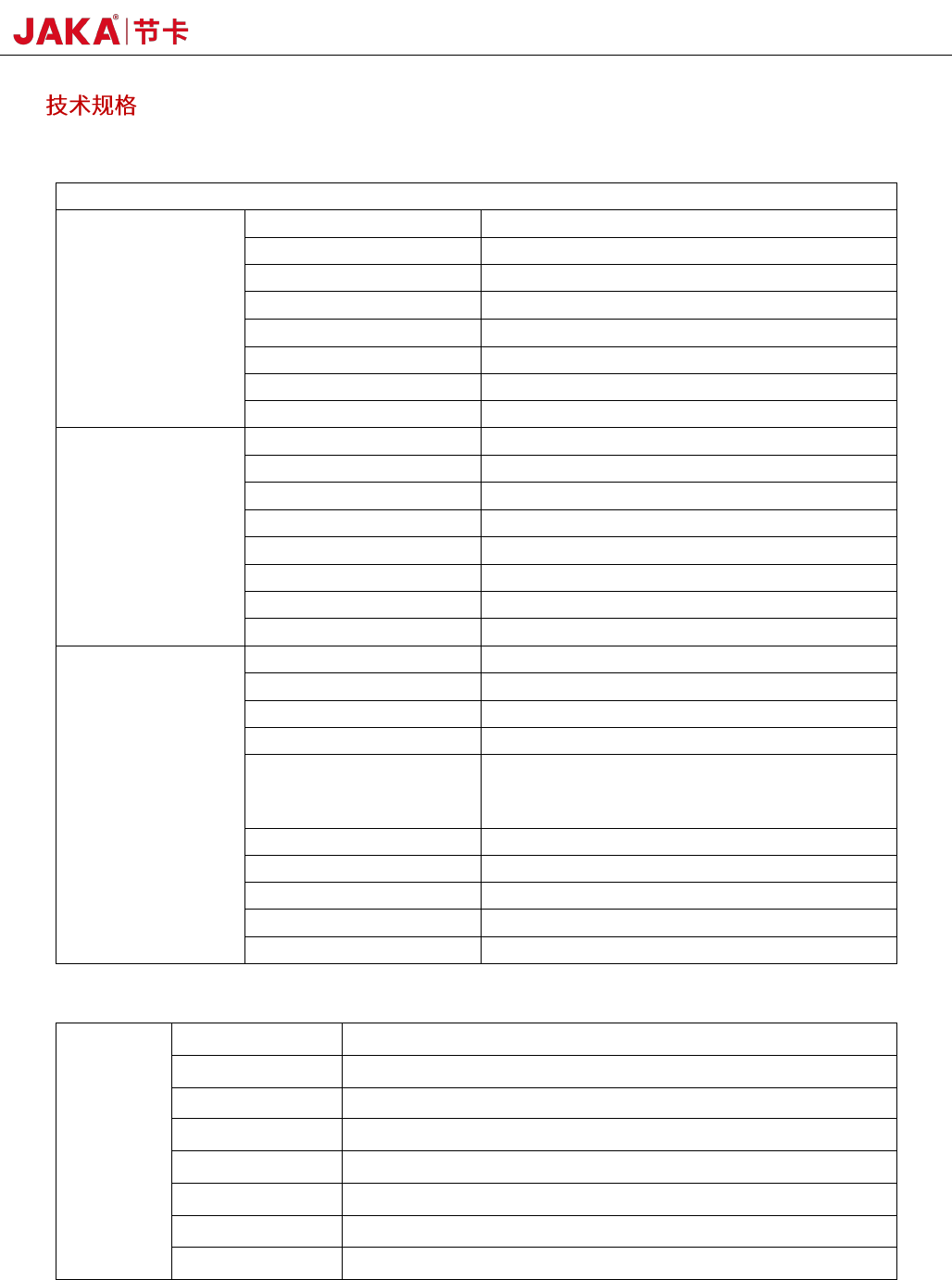
1.JAKA MiniCobo 机器人技术规格:
机器人型号 JAKA MiniCobo
产品特性
有效负载
1.0kg
重量(含电缆)
8.7kg
工作半径
576.3mm
重复定位精度
±0.1mm
自由度
6
编程
图像化编程、拖拽编程
示教器类型
移动终端(PAD/手机)APP
协作操作
根据 GB 11291.1-2011 进行协同操作
动作范围及速度
机械臂
动作范围 最大速度
关节 1
±360° 180°/s
关节 2
±120° 180°/s
关节 3
±125° 180°/s
关节 4
±360° 180°/s
关节 5
±120° 180°/s
关节 6
±360° 180°/s
工具端最大速度
/ 1.5m/s
物理性能及其他
经典功耗
150W
温度范围
0-50°C
IP 等级
IP40
机器人安装
任意角度安装
工具 I/O 端口
数字输入 2
数字输出 2
模拟输入 1
工具 I/O 电源
24V
底座直径
124mm
材质
铝合金、PC
工具 I/O 尺寸
M8
机器人连接电缆长度
6m
2.控制器技术规格:
控制器
IP 等级
IP20
控制器 I/O 端口
7 路输入输出复用
控制器 I/O 电源
24VDC
通信方式
TCP/IP, Modbus TCP, Modbus RTU
电源
24VDC
控制器尺寸
180×46.6×128mm(W*H*D)
重量
1.1kg
材质
喷塑碳钢板、铝合金