节卡机器人-用户手册硬件部分.pdf - 第32页
JA 27 图 6- 10 制动电压设置 路径 电压设定值 V B ra ke 与输入电压 V I N 的关系为 V B ra k e ≥( V I N +3 )V , 则 按 照 常 用 的 输 入 电 压 类 型 推 荐 设 定 值 与 动 力 电 源 类 型 对 应表如下: 电源类型 电压 V IN 制动电阻 启动 电压 V Brake 24V 模块电 源 24V 27V 注: ( 1 ) 当设定的 V Brake < (V IN…
JA
26
UDIO_COM
低电平范围
24V
0~7V
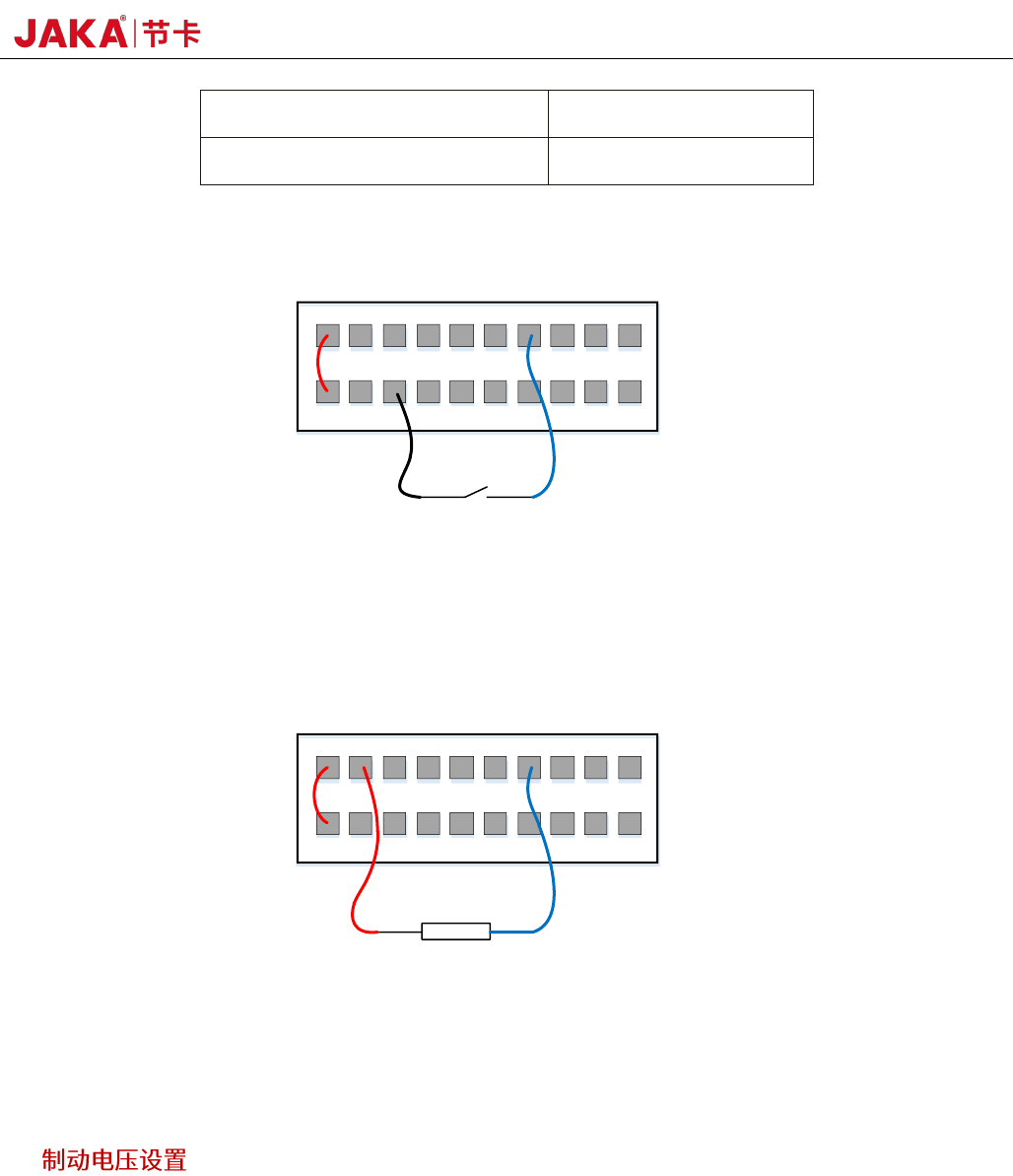
当配置为 DI 时,为 NPN 型输入,将 UDIO_1(PIN13)短接至 GND(PIN6)时有效。当使用内部 UDIO_24V 时, 请将 PIN1
和 PIN2 默认进行短接,其典型接线图如下:
K1
1 3 5 7 9
2 4 6 8
10
11 13 15 17 19
12 14 16 18 20
图 6-8 UDIO_x 作为 DI 时接线示意图
2、DO 数字量输出:
当配置为数字输出接口 DO 时,为 NPN 型输出,内部采用开集(Open Collector)输出,并接有续流二极管,最
高支持 1A 电流能力输出,使用内部 UDIO_24V 时其典型接线图如下:
1 3 5 7 9
2 4 6 8
10
11 13 15 17 19
12 14 16 18 20
LOAD
图 6-9 UDIO_x 作为 DO 时接线示意图
3、双通道冗余安全架构
MiniCab 内部将 UDIO 隔离开来,当有高安全性能需求时,可将 UDIO1 和 UDIO2,UDIO3 和 UDIO4,UDIO5 和
UDIO6 组成 3 对输入输出对,保障在紧急情况发生时,MiniCab 能够检测相关信号。
6.3
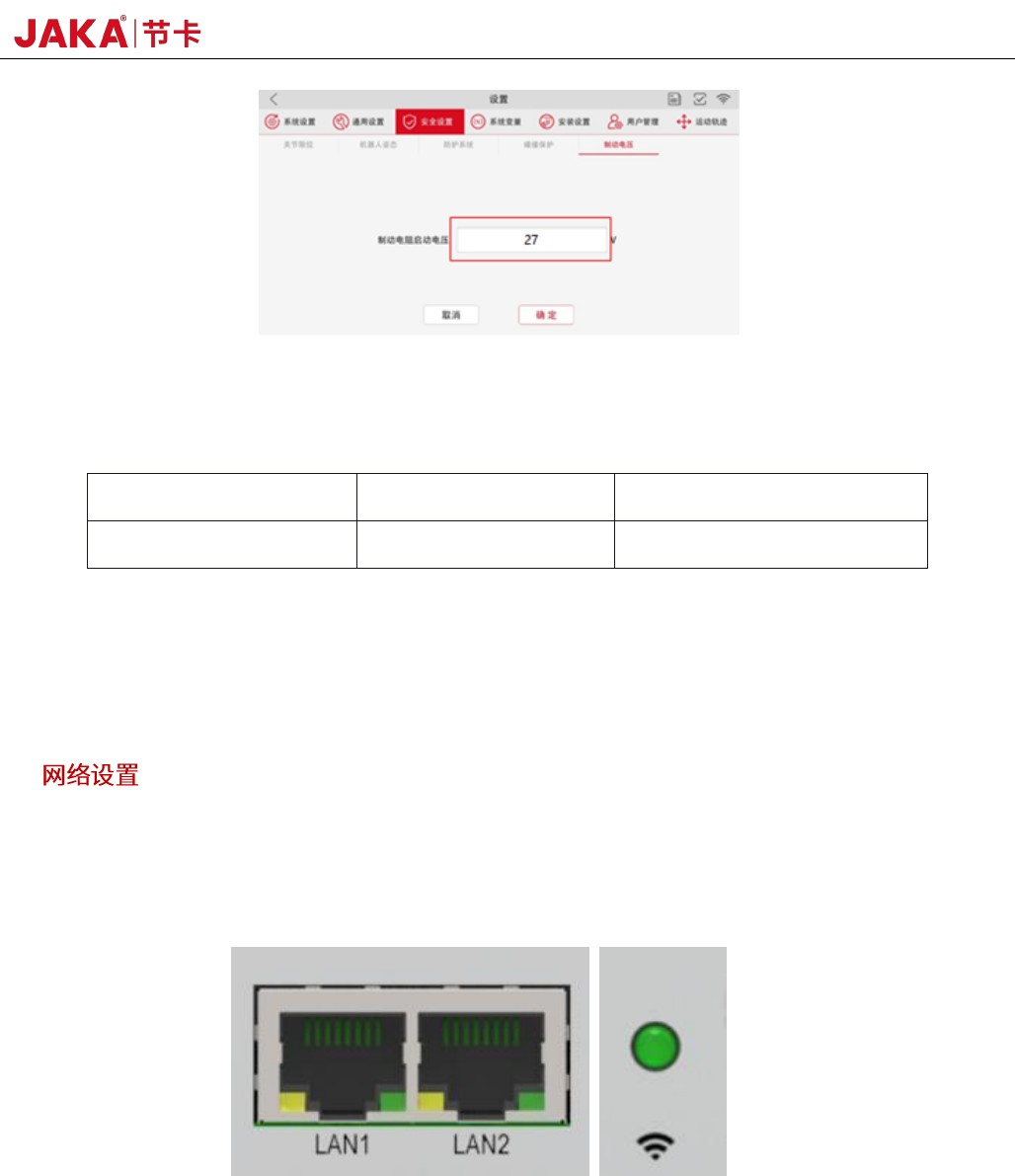
MiniCab 内部集成了电压制动电路,用于泄放机器人在减速以及刹车时产生的电动势。当用户使用外部动力电源
时,需要对其进行设置,以避免出现过压保护掉电或者损坏控制器。设置制动电压时需要给机器人本体断电才可以操作,设
置路径如下:
JA
27
图 6-10 制动电压设置路径
电压设定值
V
Brake
与输入电压
V
IN
的关系为
V
Brake
≥(V
IN
+3)V
,则按照常用的输入电压类型推荐设定值与动力
电源类型对
应表如下:
电源类型
电压 V
IN
制动电阻启动电压 V
Brake
24V 模块电源
24V
27V
注:
(1)
当设定的 V
Brake
<(V
IN
+1)V 时,内部逻辑会进行上电保护,APP 提示“本体电压或电压配置异常”;
(2)
当使用锂电池配电系统时,禁止在上电使用过程中对电池进行充电。
6.4
6.4.1 网络接口介绍
MiniCab 提供 2 路网口,即 LAN1 和 LAN2,其中 LAN1 支持 10M/100M,LAN2 支持 10M/100M/1000M 自适应,
如图 6-11 所示:
图 6-11 网口和 Wi-Fi 灯
注:当 LAN 口进行物理连接数据交互时,其端口橙色 ACT 灯闪烁,绿色 LINK 灯内部悬空,不作为网口物理连接依
据。
6.4.2 Wi-Fi
MiniCab 自带 Wi-Fi 热点,出厂默认设置为无密码,用户可以通过无线终端与 MiniCab 建立连接。MiniCab 启动完成后,面板
右侧 Wi-Fi 指示灯亮起,当连接Wi-Fi 时,Wi-Fi 指示灯变为闪烁状态。通过节卡 APP 可以对 MiniCab 和机器人本体进行控制。Wi-
Fi 热点名称与 MiniCab 编号保持一致,若需要修改Wi-Fi 名称、添加连接密码等操作,请联系节卡技术服务人员。
JA
28
6.4.3 网络配置
a) LAN1 配置
LAN1 网口为 10M/100M 自适应网口,出厂默认配置为10.5.5.x 网段;当连接LAN1 网口时,需将设备IP 地址配置为
10.5.5.101~10.5.5.254 范围内;或将设备配置为动态获取IP 地址。
注:若所用设备不支持修改IP,建议将设备连接到LAN2 网口,将LAN2 网口 IP 地址配置成和设备相同网段。若 LAN2 网口已
被占用不得不使用LAN1 网口时,请联系节卡技术服务人员进行LAN1 网络修改。
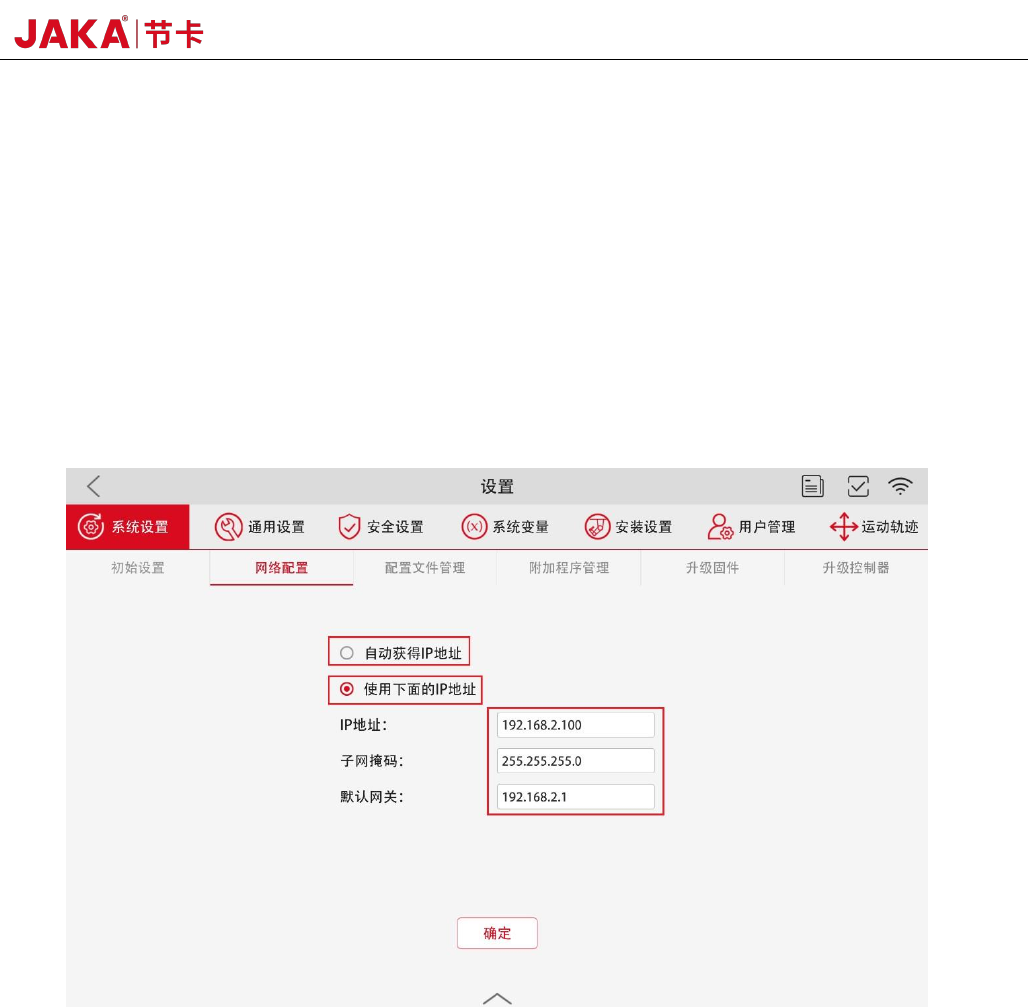
b) LAN2 配置
LAN2 网口为 10M/100M/1000M 自适应网口,出厂默认配置为动态获取IP 地址,用户可以登录节卡APP 配置为静态IP,路
径为:设置-系统设置-网络配置,配置界面如下:
图 6-12 LAN2 网络配置
注:
1、请不要将 LAN2 网口的IP 地址网段设置为和 LAN1 网口相同,否则可能会导致登录失败。
2、如 LAN2 必须要设置为 10.5.5.x 网段,请联系节卡技术服务人员对 LAN1 网口进行修改。
c) 复位配置
当忘记Wi-Fi 名称和密码而无法连接 MiniCab 时,本 MiniCab 支持硬件复位功能,复位按钮位于侧面天线处,需长按 10s 以
上进行 Wi-Fi 复位,此时Wi-Fi 网关地址会被重置,具体设置请联系节卡技术服务人员。