节卡机器人-用户手册硬件部分.pdf - 第28页
JA 23 表 6- 2 逻辑电源需 求说明 P2 额定电压 24VDC 电压范围 20~30V DC (3) 典型功率 12 W 最大功率 ≤30 W 注: 1 ) 不包含 20V , MiniC obo 本体 2 0V 为欠压阈值; 2 ) 此处仅为推荐电源型号,客户可以选购同等规格电源,同时峰值功率与机器人负载、使用场景有关,此处标注的为满足的最大值 ; 3 ) 若 VP+ 和 V L+ 输 入 都 低 于 24VDC 时, “U…
JA
22
6 MiniCab
6.1
JAKA MiniCab 为集成应用进行了优化,设计中尤为注重将其集成到用户设备中时的易用性。可搭配
JAKA MiniCobo 和 JAKA Zu
®
系列机器人使用。
6.2
本节主要用于指导使用 JAKA MiniCab 控制机器人的基本方法,便于客户更简便使用该控制器。同时涉及到机
器人的使用知识,请详细参考具体机器人的用户手册。
6.2.1 机器人接口
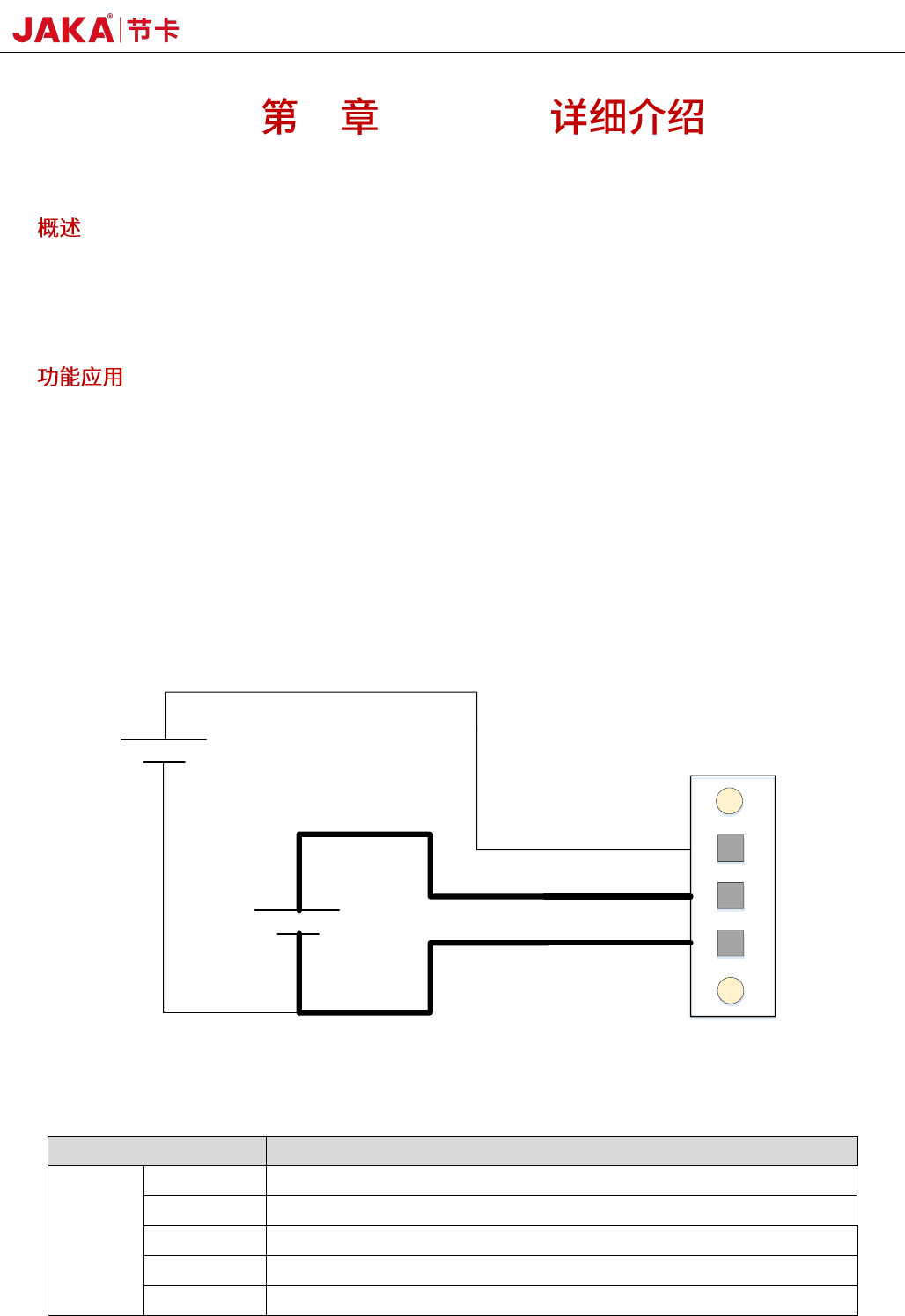
MiniCab 电源接口包括机器人逻辑供电输入 VL+(Pin1)、本体功率供电输入 VP+(Pin2)和公共负极 GND(Pin3)三
个输入端子;
VP+和 VL+输入内部经由二极管后供给 MiniCab 逻辑电路使用。所以通常只需要将外部接入 VP+和 GND 即可。
如果需要紧急情况下将 VP+断开,同时不想控制器逻辑断电,可以在 VL+处单独接入逻辑源。
1
3
2
VP+
VL+
GND
+
P1
+
P2
图 6-1 供电接线方式示意图
1、 针对不同机型需要适配的电源 P1(动力电源)要求如下表示:
表 6-1 动力电源需求说明
适配机型
MiniCobo
P1
额定电压
24VDC
电压范围
20~30VDC
(1)
电流范围
0~12A
峰值功率
280W
推荐型号
GST280A24,MW
2、 需要适配的电源 P2(逻辑电源)要求如下表所示:
JA
23
表 6-2 逻辑电源需求说明
P2
额定电压
24VDC
电压范围
20~30VDC
(3)
典型功率
12W
最大功率
≤30W
注:
1)不包含 20V,MiniCobo 本体 20V 为欠压阈值;
2)此处仅为推荐电源型号,客户可以选购同等规格电源,同时峰值功率与机器人负载、使用场景有关,此处标注的为满足的最大值;
3)若 VP+和 VL+输入都低于 24VDC 时,“UDIO_24V”输出会低于 24V。
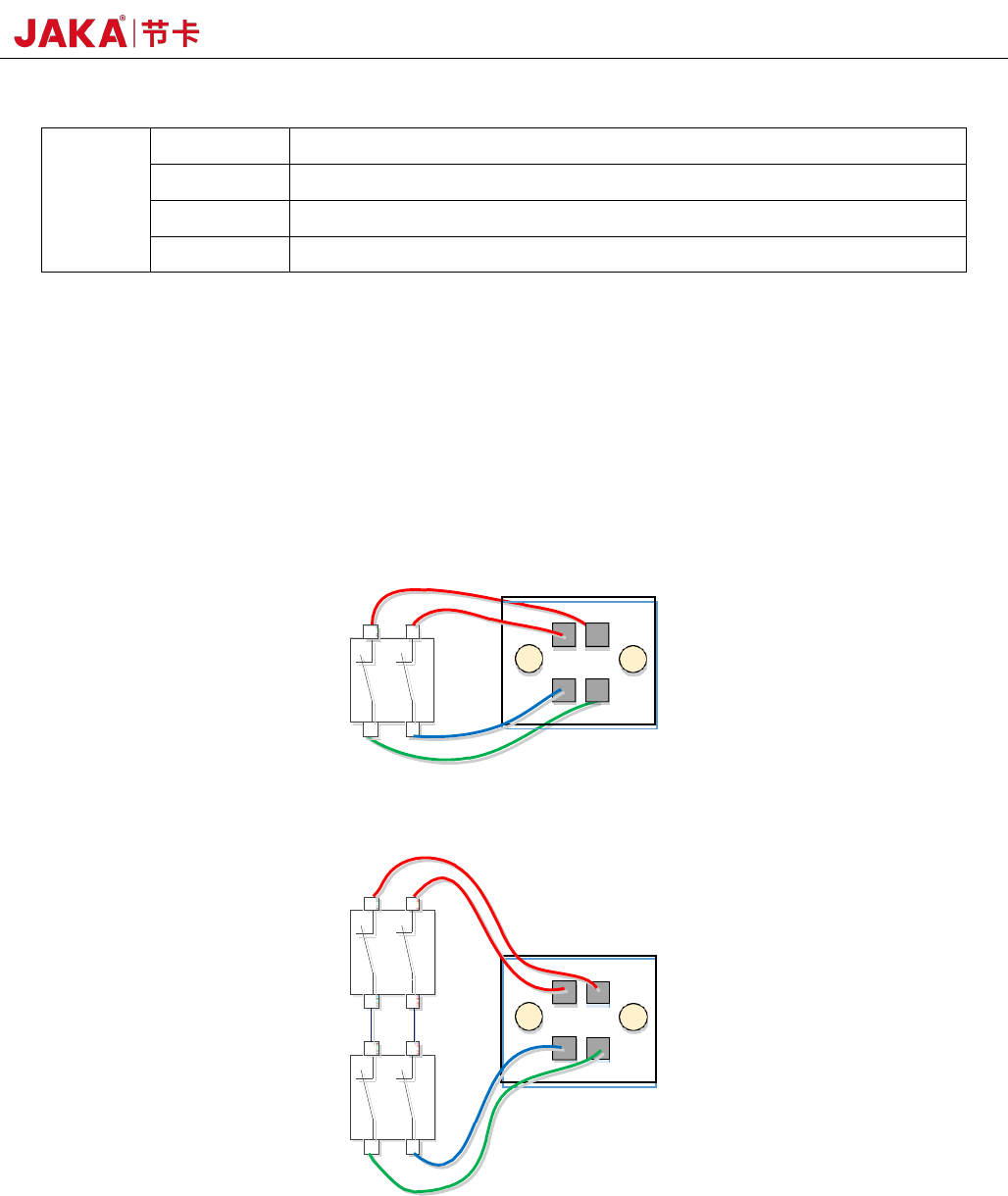
6.2.2 紧急停止
MiniCab 除了手柄自带急停按钮外,面板支持单独的 E-STOP 连接器,出厂默认短接至内部 24V。用户可去掉
短接片,接外部开关,单路开关/多路开关接线图如下所示:
图 6-2 紧急停止-单路开关
图 6-3 紧急停止-多路开关
6.2.3 开关机
给 MiniCab 供电 4 秒之后,可对 MiniCab 进行开机操作。开关机有 3 种方式进行:
1 3
2 4
1 3
2 4
JA
24
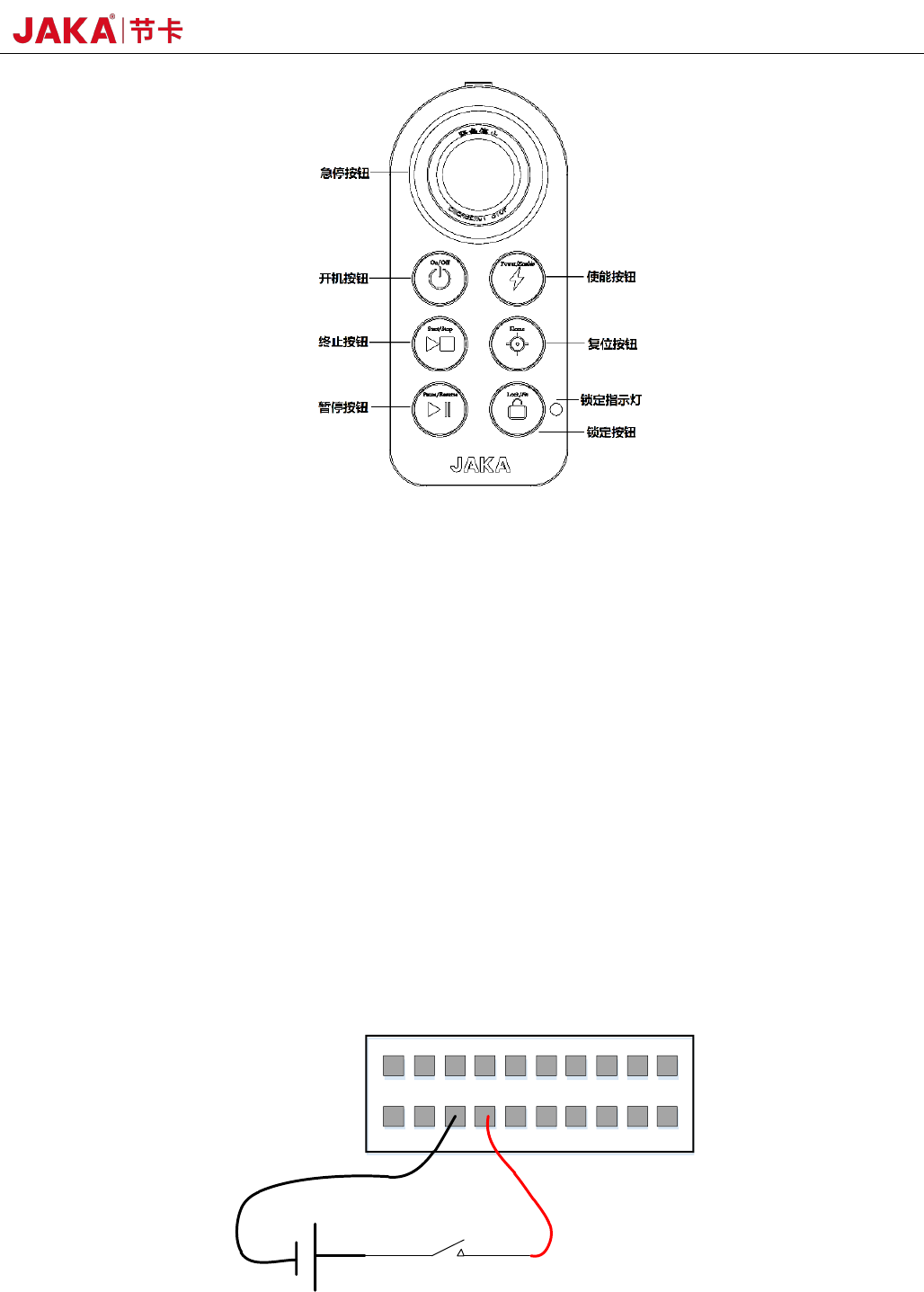
图 6-4 手柄控制盒
1、用户手柄开关机:
开机:短按 1s 开机键后松开,蜂鸣器响,控制器开机。
关机:长按开机键 3s 以上,手柄蜂鸣 6~7 次,控制器关机。
详情请参考产品用户手册手柄操作方法。
2、前面板 POWER 按钮:
开机:短按 1s 开机键后松开,控制器开机
关机:长按 POWER 键 3s 以上,控制器关机。
3、远程开关机接口
使用集成I/O 端口上的远程开关机可以进行开关机操作,当使用外置开关机按钮时,必须使用自恢复/弹簧式按钮开
关,否则可能导致远程开关机操作失效。
开机操作:远程开机需要用户单独提供外部 24VDC 电源,将电源正极接入 PIN8(Remote_ON)接口,负极
接 PIN6(GND),以下为远程开关接线示意图,短按 K1 约 1s 后松开,控制器开机。
1 3 5 7 9
2 4 6 8
10
自恢复开关
DC24V电源
+
K1
图 6-5 远程开机-使用外部电源