节卡机器人-用户手册硬件部分.pdf - 第20页
JA 15 3.220 V AC- DC 电源适 配器 品牌型号 GST280A24 - C6P , MW 安规型号 GST280A64 直流电压 24V 额定电流 1 1.67A 电流范围 0~1 1.67A 额定功率 ( 最大 ) 280.0 8W 纹波与噪声(最 大) 200mVp-p 电压精度 ±3% 线性调整率 ±1% 负载调整率 ±3%
JA
14
3.3
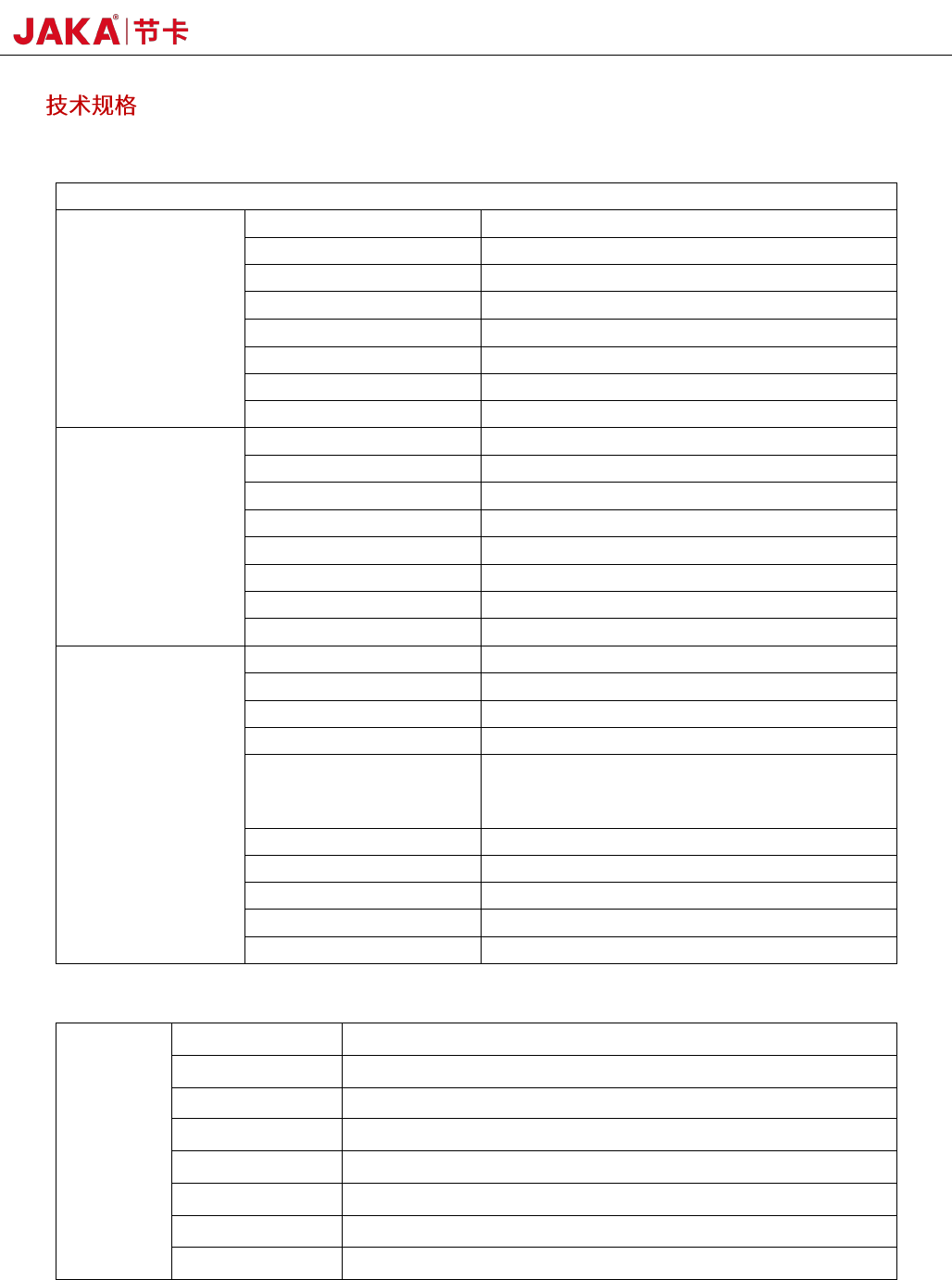
1.JAKA MiniCobo 机器人技术规格:
机器人型号 JAKA MiniCobo
产品特性
有效负载
1.0kg
重量(含电缆)
8.7kg
工作半径
576.3mm
重复定位精度
±0.1mm
自由度
6
编程
图像化编程、拖拽编程
示教器类型
移动终端(PAD/手机)APP
协作操作
根据 GB 11291.1-2011 进行协同操作
动作范围及速度
机械臂
动作范围 最大速度
关节 1
±360° 180°/s
关节 2
±120° 180°/s
关节 3
±125° 180°/s
关节 4
±360° 180°/s
关节 5
±120° 180°/s
关节 6
±360° 180°/s
工具端最大速度
/ 1.5m/s
物理性能及其他
经典功耗
150W
温度范围
0-50°C
IP 等级
IP40
机器人安装
任意角度安装
工具 I/O 端口
数字输入 2
数字输出 2
模拟输入 1
工具 I/O 电源
24V
底座直径
124mm
材质
铝合金、PC
工具 I/O 尺寸
M8
机器人连接电缆长度
6m
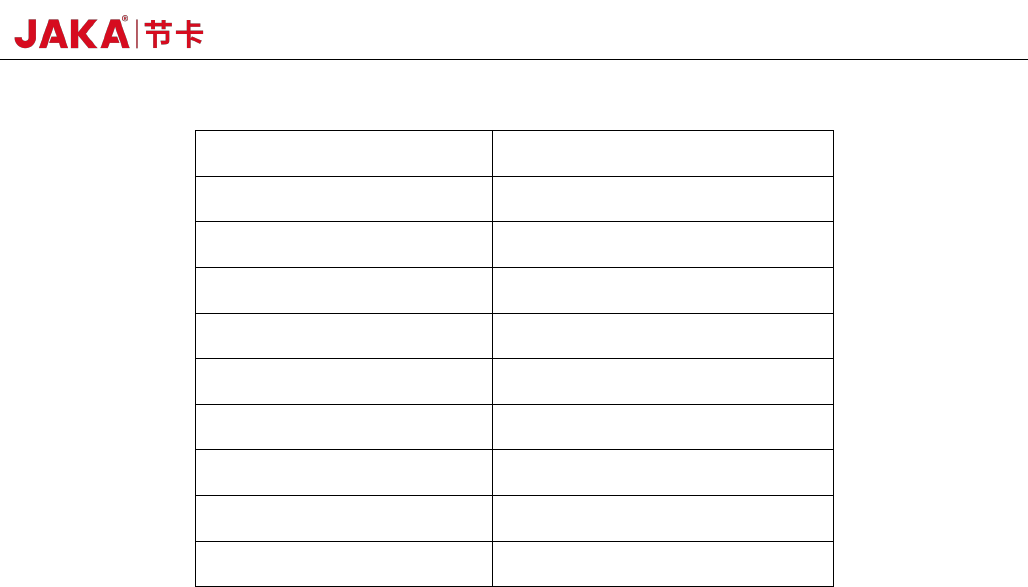
2.控制器技术规格:
控制器
IP 等级
IP20
控制器 I/O 端口
7 路输入输出复用
控制器 I/O 电源
24VDC
通信方式
TCP/IP, Modbus TCP, Modbus RTU
电源
24VDC
控制器尺寸
180×46.6×128mm(W*H*D)
重量
1.1kg
材质
喷塑碳钢板、铝合金
JA
15
3.220V AC-DC 电源适配器
品牌型号
GST280A24-C6P,MW
安规型号
GST280A64
直流电压
24V
额定电流
11.67A
电流范围
0~11.67A
额定功率(最大)
280.08W
纹波与噪声(最大)
200mVp-p
电压精度
±3%
线性调整率
±1%
负载调整率
±3%
JA
16
4
4.1
本章主要描述 MiniCab 的绝对极限参数和推荐的使用条件,用户在使用机器人和 MiniCab 控制器时,务必按照推
荐的电气参数使用,达到或者超过极限参数,有可能会造成控制器硬件损坏。
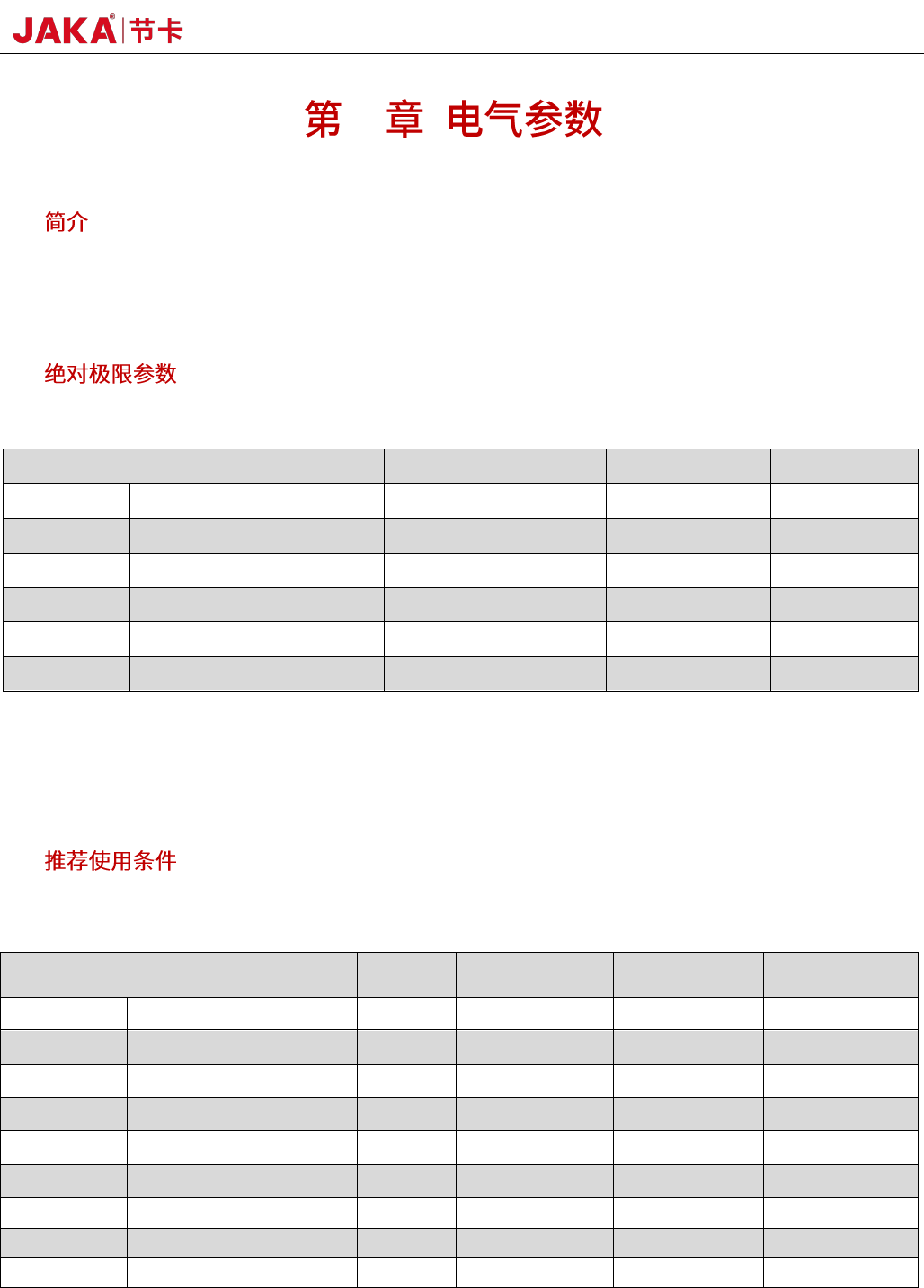
4.2
表 4-1 电气极限参数
最小值
最大值
(1)(2)
单位
VL+
逻辑电供电电压
-0.3
40
V
VP+
动力电供电电压
-0.3
40
V
V
UDIO_COM+
集成接口公共端电压
-0.3
30
V
I
UDIO_24V
集成接口输出电流
0
2.7
A
I
UDIOx
集成接口单通道输出电流
0
2
A
Vbus
RS485
RS485 总线耐压
-70
70
V
注:
(1)超过“绝对极限参数”所列的值可能对设备造成永久性损伤。这些代表极限值,不建议在这些条件下或“推荐运行条件”以外的任何其他条件下进行设备
的功能运行。
(2)除总线电压外,所有电压值都与接地有关。
4.3
表 4-2 推荐使用条件
最小值
典型值
最大值
单位
VL+
逻辑电供电电压
20
(1)
24
30
V
VP+
动力电供电电压
20
(2)
24
30
V
I
RMS
平均工作电流
8
A
I
peak
输出峰值电流
12
(3)
A
I
UDIOx
用户接口单通道输出电流
1
A
环境温度
0
50
(4)
℃
大气压
1
Bar
海拔高度
1000
m
相对湿度
10
90
%RH
注:
(1)逻辑电压最小值可以启动控制器相关的逻辑功能,但 UDIO_24V 输出大小取决于逻辑供电电压。
(2)动力电主要给机器人提供电源,通常机器人在≤20V 时会出现欠压保护,所以输入最小值时需要考虑电压损耗和跌落导致的异常。
(3)输出电流峰值大小与适配的机器人型号和工作状态有关。