节卡机器人-用户手册硬件部分.pdf - 第23页
JA 18 5 MiniCab 在前面板和 侧面板均布 置了相关的用 户接口 ,前面板包括 20P IN 的集成 I/O , USB , HD MI , LAN ,手 柄和急停端口, Wi - Fi 状态指示 灯和开关机按 钮; 侧面板包括电源 输入端 口,机器人本 体接口、 2.4G W i- Fi 天线, 以及内部集成 路由复位按钮 。 表 5- 1 接口定义说明 接口名称 数量 说明 UDIO 7 7 路数字接口, NPN 型输入…
JA
17
(4)控制器工作时会产生热表面,需要在通风和散热条件良好的场合使用。
4.4
测试条件:25℃,逻辑电电压 24V,机器人供电 24V,未连接机器人和集成接口,连接了手柄
表 4-3 典型功耗
参数
测试工况
最小值
典型值
最大值
单位
关机功耗
1
5
W
开机
12
30
W
开通机器人电源
30
W
4.5
表 4-4 计算机配置
CPU
主频 2GHz,睿频 2.4GHz
内存
DDR3L 2G
硬盘
32G,可选更大
计算机接口
HDMI、USB3.0 x1、USb2.0 x1、Ethernet x2
JA
18
5
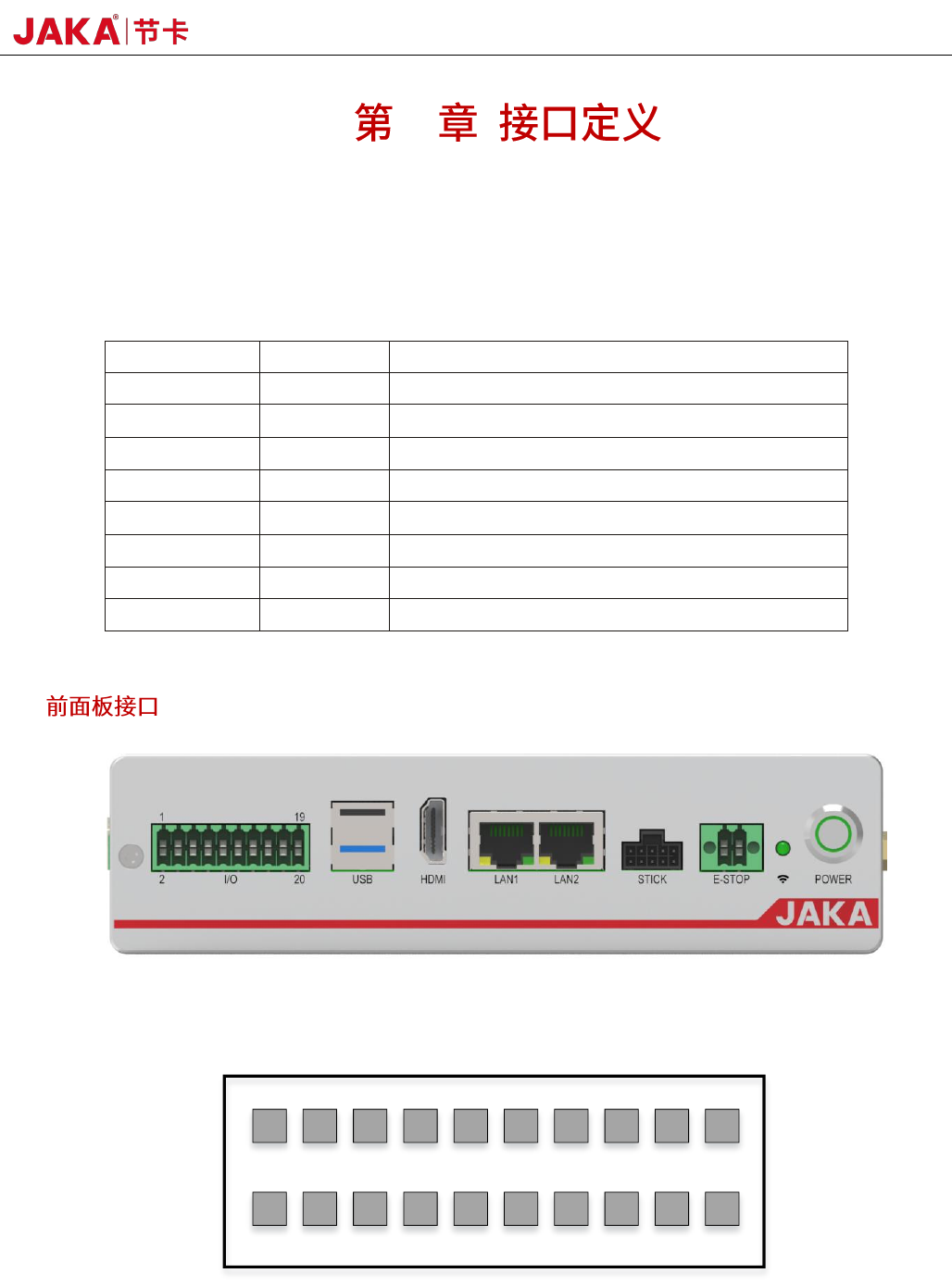
MiniCab 在前面板和侧面板均布置了相关的用户接口,前面板包括 20PIN 的集成 I/O,USB,HDMI,LAN,手
柄和急停端口,Wi-Fi 状态指示灯和开关机按钮;
侧面板包括电源输入端口,机器人本体接口、2.4G Wi-Fi 天线,以及内部集成路由复位按钮。
表 5-1 接口定义说明
接口名称
数量
说明
UDIO
7
7 路数字接口,NPN 型输入输出可配置
RS485
2
拥有 Master、Slave 两路
USB
2
USB3.0*1、USB2.0*1
HDMI
1
用于外接显示设备
LAN1
1
内部集成路由端口,百兆以太网接口
LAN2
1
10M/100M/1000M 自适应以太网口
DC_INPUT
1
逻辑&功率直流电源输入端口
COBOT
2
机器人本体供电以及 CAN 通信接口
5.1
图 5-1 前面板示意图
5.1.1 集成接口(I/O)
图 5-2 集成接口示意图
用户集成接口采用双排 3.5mm 间距可插拔端子,集成了丰富接口供用户使用。
1 3 5 7 9 11 13 15 17 19
2 4 6 8 10 12 14 16 18 20
JA
19
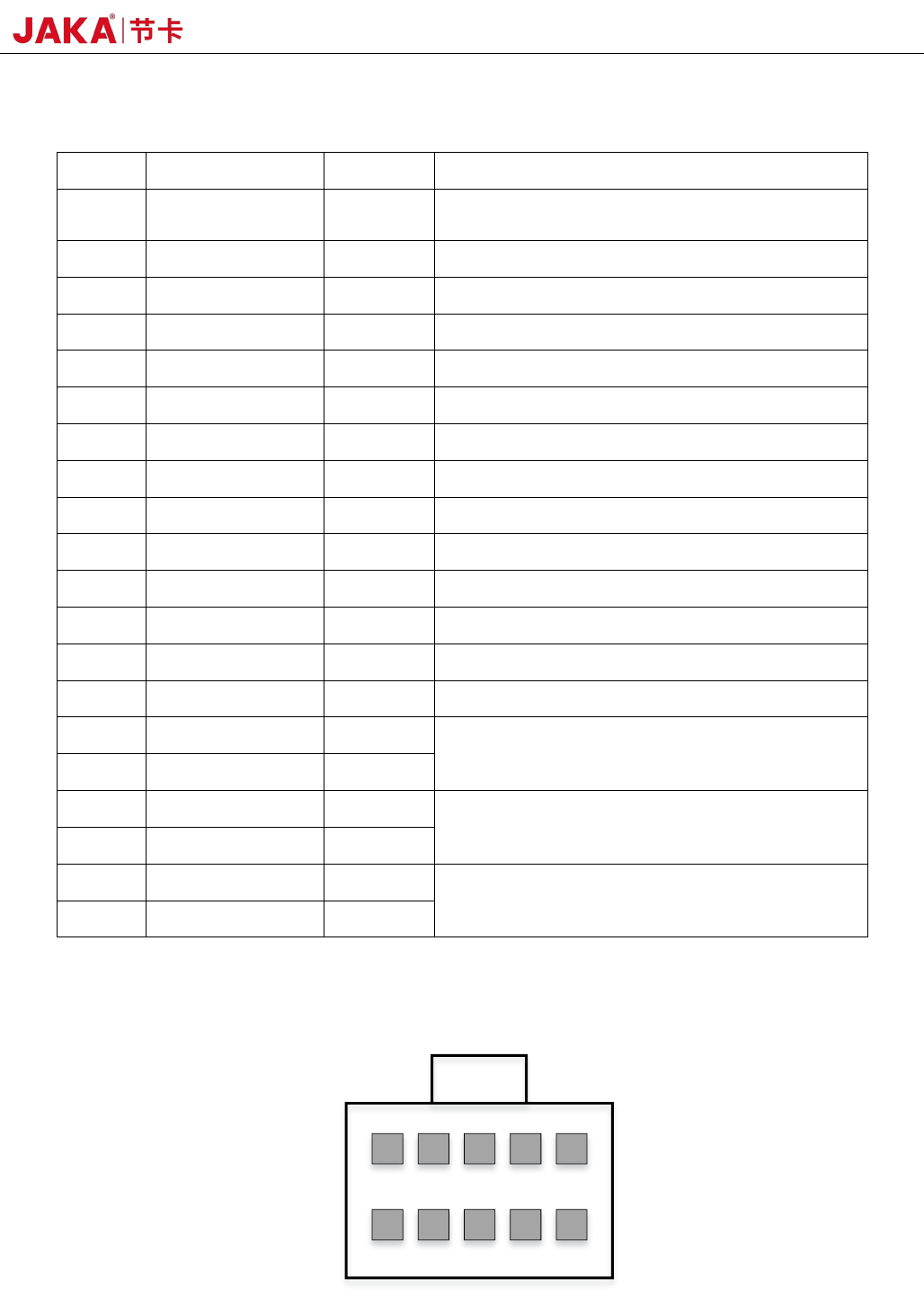
具体接口引脚定义如下所示:
表 5-2 集成接口引脚定义
序号
信号名称
信号类型
说明
1
UDIO_24V
PO
集成接口 24V 电源输出,内部集成 2.7A 过流保护功
能
2
UDIO_COM
PI
用户接口电源正公共端,默认外部短接到 PIN1
3
UDIO_24V
PO
集成接口 24V 电源输出,同 PIN1
4
GND
PO
用户接口电源逻辑地
5
Remote_OFF
I
远程关机控制输入,接 24V 触发关机操作
6
GND
PO
用户接口电源逻辑地,同 PIN4
7
UDIO4
I/O
输入输出复用端子通道 4,NPN 型
8
Remote_ON
I/O
远程开机控制输入,接外部+24V 电源触发开机操作
9
UDIO3
I/O
输入输出复用端子通道 3,NPN 型
10
UDIO7
I/O
输入输出复用端子通道 7,NPN 型
11
UDIO2
I/O
输入输出复用端子通道 2,NPN 型
12
UDIO6
I/O
输入输出复用端子通道 6,NPN 型
13
UDIO1
I/O
输入输出复用端子通道 1,NPN 型
14
UDIO5
I/O
输入输出复用端子通道 5,NPN 型
15
Reserved_CANH
IO
仅限内部调试使用
16
Reserved_CANL
IO
17
MasterBus_RS485A
IO
RS485,主站接口,
通常用于扩展 I/O 板卡的 RS485 接口
18
MasterBus_RS485B
IO
19
SlaveBus_RS485A
IO
RS485,从站接口,
通常用于外部 PLC 等设备通信
20
SlaveBus_RS485B
IO
5.1.2 手柄接口(STICK)
图 5-3 手柄接口示意图
5 4 3 2 1
10
9 8 7 6