节卡机器人-用户手册硬件部分.pdf - 第26页
JA 21 5.2 图 5-5 侧面板示意图 5.2 .1 电 源接口 电源接口分为逻 辑电和 功率电两路, 逻辑电 VL + 为控制 器内部逻辑电源 供电 引脚 ,功 率电 VP + 为机器人本体供 电电压,同时 VP + 也可为内部 逻辑电源供电 。 1 3 2 VP+ VL+ GND 图 5- 6 电源接口示意图 接口定义如下: 表 5- 5 电源接口引脚定 义 引脚序号 信号 信号类型 说明 1 VL+ PI 逻辑电供电输入 2…
JA
20
MiniCab 手柄接口定义如下
(
1
)
,
表 5-3 手柄接口定义
引脚序号
信号
信号类型
说明
1
24V
PO
手柄电源输出
2
PBn
I
3.3V 逻辑信号输入,低电平触发控制器开关机操作
3
BP_CANL
IO
手柄、控制器通讯 CAN 信号
4
BP_CANH
IO
手柄、控制器通讯 CAN 信号
5
ESTOP_BP_C1
PO
内部连接到引脚 1(24V)
6
ESTOP_BP_PC1
I
24V 逻辑输入,高电平表示急停正常。
7
ESTOP_BP_C2
PO
内部连接到引脚 1(24V)
8
ESTOP_BP_PC2
I
24V 逻辑输入,高电平表示急停正常
9
Reserved
-
系统保留
10
GND
PO
逻辑地
注:
(1)仅用于连接 JAKA BP 手柄,不可任意改造外部接口。
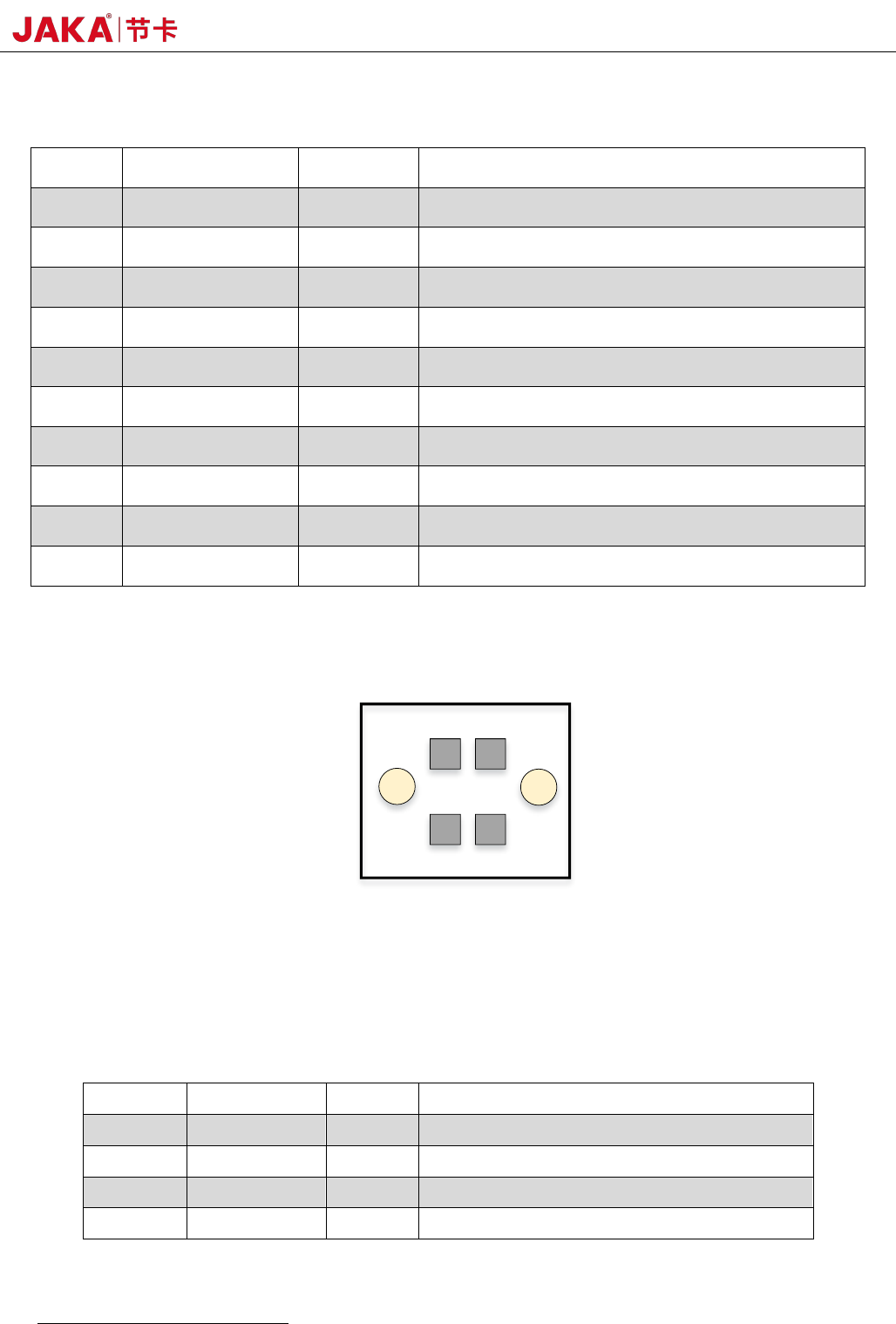
5.1.3 急停接口(E-STOP)
图 5-4 急停接口示意图
外部急停输入接口采用双排 3.5mm 间距的可插拔接线端子,不外接急停时需用导线将 Pin1、Pin2 脚,Pin3、
Pin4 脚短接。出厂默认短接。接口定义如下表:
表 5-4 急停接口引脚定义
引脚序号
信号
信号类型
说明
1
VCC_24V
PO
内部逻辑电 24V 输出
2
ESTOP1
I
急停输入 1,默认短接至 PIN1
3
VCC_24V
PO
内部逻辑电 24V 输出
4
ESTOP2
I
急停输入 2,默认短接至 PIN3
1 3
2 4
JA
21
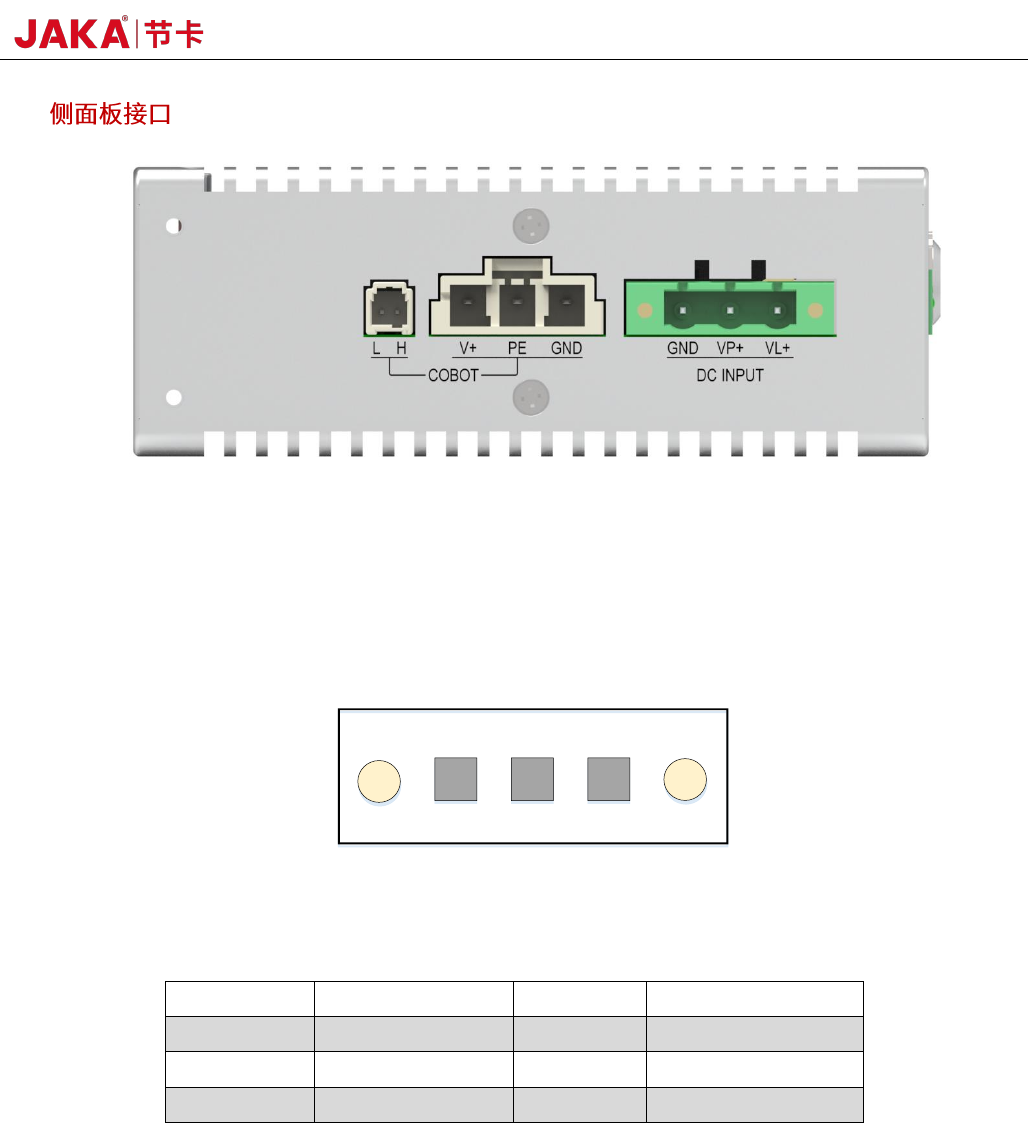
5.2
图 5-5 侧面板示意图
5.2.1 电源接口
电源接口分为逻辑电和功率电两路,逻辑电 VL+为控制器内部逻辑电源供电引脚,功率电 VP+为机器人本体供
电电压,同时 VP+也可为内部逻辑电源供电。
13 2
VP+
VL+
GND
图 5-6 电源接口示意图
接口定义如下:
表 5-5 电源接口引脚定义
引脚序号
信号
信号类型
说明
1
VL+
PI
逻辑电供电输入
2
VP+
PI
机器人供电输入
3
GND
PI
0V 输入
机器人供电输入为机器人本体供电,也可以为控制柜内如逻辑部分电路供电,当逻辑供电与机器人供电不需要分
离时,只需接 2 和 3 号脚;为满足载流能力,建议使用 14AWG 或 1.63 mm
2
以上线缆。
5.2.2 机器人接口
COBOT 端口为机器人本体接线端子,两种端子均支持防呆带锁扣功能,JAKA 提供适配线缆。
JA
22
6 MiniCab
6.1
JAKA MiniCab 为集成应用进行了优化,设计中尤为注重将其集成到用户设备中时的易用性。可搭配
JAKA MiniCobo 和 JAKA Zu
®
系列机器人使用。
6.2
本节主要用于指导使用 JAKA MiniCab 控制机器人的基本方法,便于客户更简便使用该控制器。同时涉及到机
器人的使用知识,请详细参考具体机器人的用户手册。
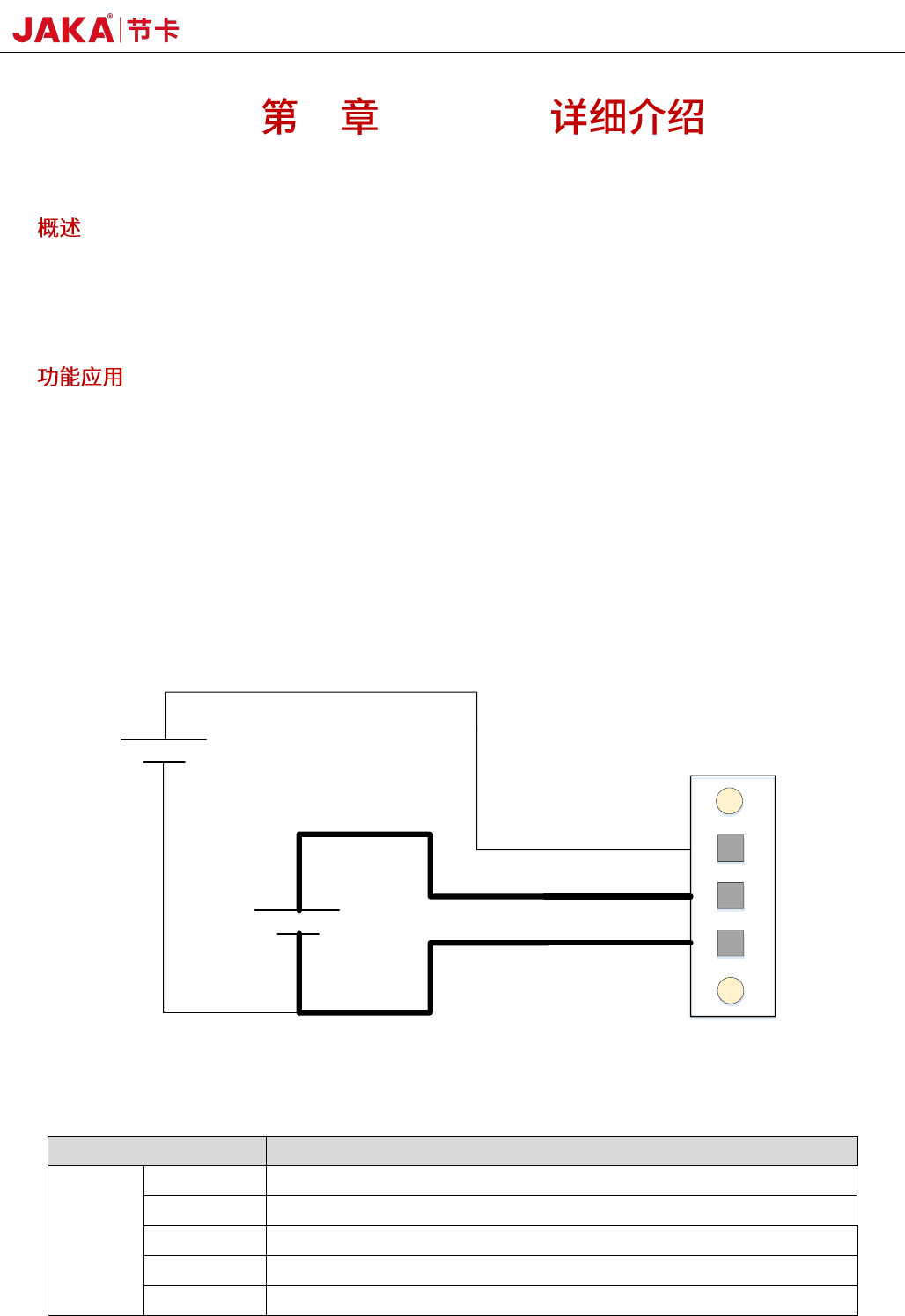
6.2.1 机器人接口
MiniCab 电源接口包括机器人逻辑供电输入 VL+(Pin1)、本体功率供电输入 VP+(Pin2)和公共负极 GND(Pin3)三
个输入端子;
VP+和 VL+输入内部经由二极管后供给 MiniCab 逻辑电路使用。所以通常只需要将外部接入 VP+和 GND 即可。
如果需要紧急情况下将 VP+断开,同时不想控制器逻辑断电,可以在 VL+处单独接入逻辑源。
1
3
2
VP+
VL+
GND
+
P1
+
P2
图 6-1 供电接线方式示意图
1、 针对不同机型需要适配的电源 P1(动力电源)要求如下表示:
表 6-1 动力电源需求说明
适配机型
MiniCobo
P1
额定电压
24VDC
电压范围
20~30VDC
(1)
电流范围
0~12A
峰值功率
280W
推荐型号
GST280A24,MW
2、 需要适配的电源 P2(逻辑电源)要求如下表所示: