99469_UR16e_User_Manual_zh_Global.pdf - 第137页
22. 18.1. 与 回 零 同 步 1. 在 页 眉 中 , 点 按 安 装 设 置 。 2. 在 屏 幕 左 侧 的 边 栏 菜 单 中 , 点 按 安 全 , 然 后 选 择 安 全 原 点 。 3. 在 安 全 原 点 下 , 点 按 与 原 点 同 步 。 4. 点 按 应 用 , 然 后 从 弹 出 的 对 话 框 中 选 择 应 用 并 重 启 。 22 . 1 9. 安 全 回 零 输 出 安 全 原 点 必 须 在 …
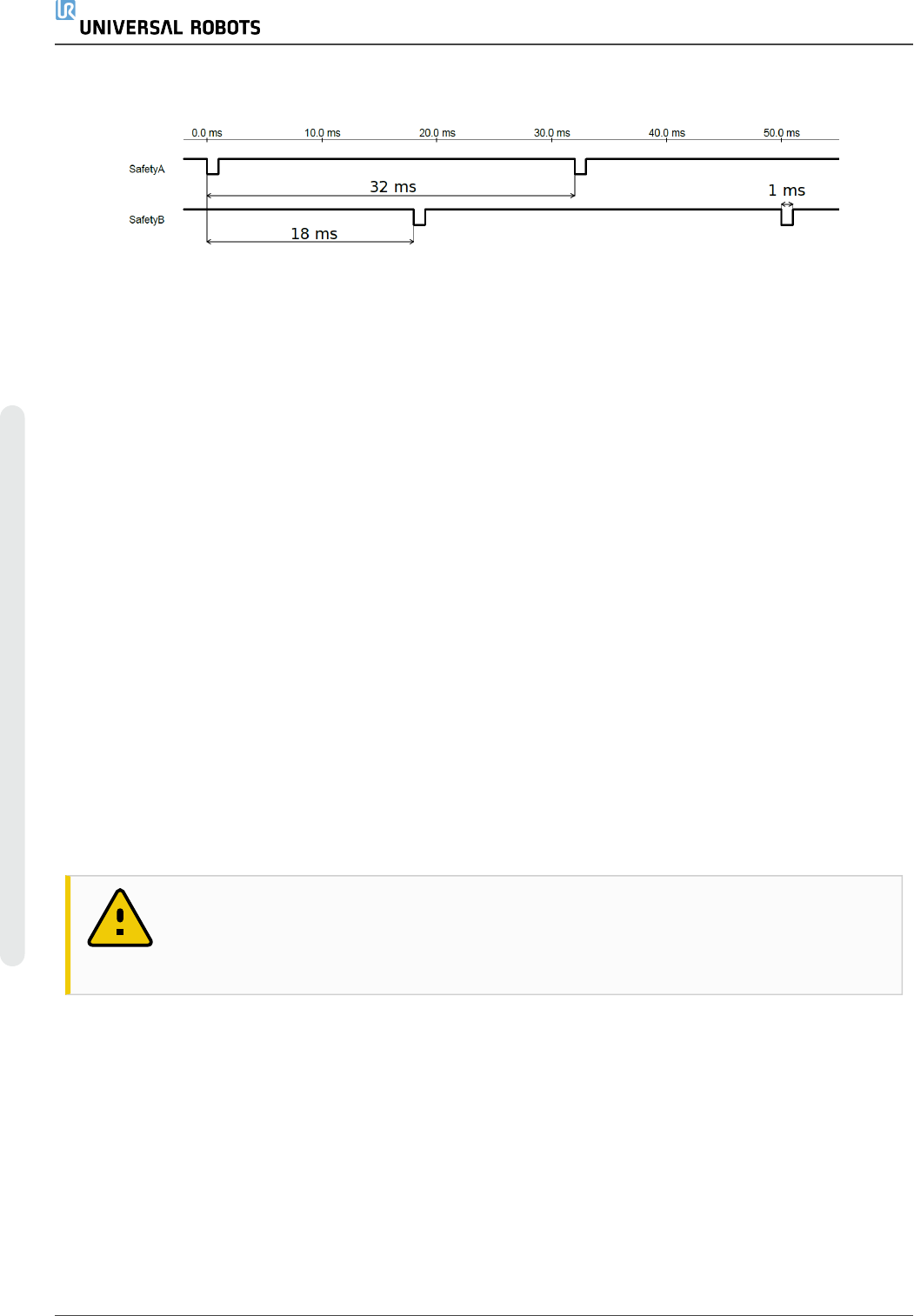
下图显示的内容为:一个通道( 32ms) 上的脉冲之间的时间,脉冲长度( 1ms) 和从一个通道上的
脉冲到另一通道上的脉冲的时间( 18ms)
启用OSSD进行安全输出
1. 点按页眉中的安装,然后选择安全。
2. 在安全下,选择 I/O。
3. 在“I/O”屏幕上的“输出信号”下,选择所需的OSSD复选框。须分配输出信号以启用OSSD
复选框。
22.17. 硬件
您可以在不连接示教盒的情况下使用机器人。移除示教盒需要定义另一个紧急停止源。必须
指定是否连接示教盒以避免触发安全违例。
22.17.1. 选择可用的硬件
机器人可在没有 PolyScope 作为编程界面的情况下使用。
1. 在页眉中,点按安装设置。
2. 在左侧的边栏菜单中,点按安全,然后选择硬件。
3. 输入安全密码并解锁屏幕。
4. 取消选中示教盒,在没有 PolyScope 界面的情况下使用机器人。
5. 按保存并重启以应用更改。
小心
如果示教盒与机器人分离或断开,则紧急停机按钮不再有效。您必须从机器人
附近移除示教盒。
22.18. 安全回零位置
安全回零是使用用户定义的原点定义的返回位置。当机器人手臂处于安全回零位置且定义了
安全回零 I/O 时,安全回零 I/O 启用。如果关节位置处于指定的关节角度或其 360 度的倍数,则
机器人手臂处于安全回零位置。当机器人静止在安全回零位置时,安全回零安全输出有效。
UR16e 122 用 户 手 册
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
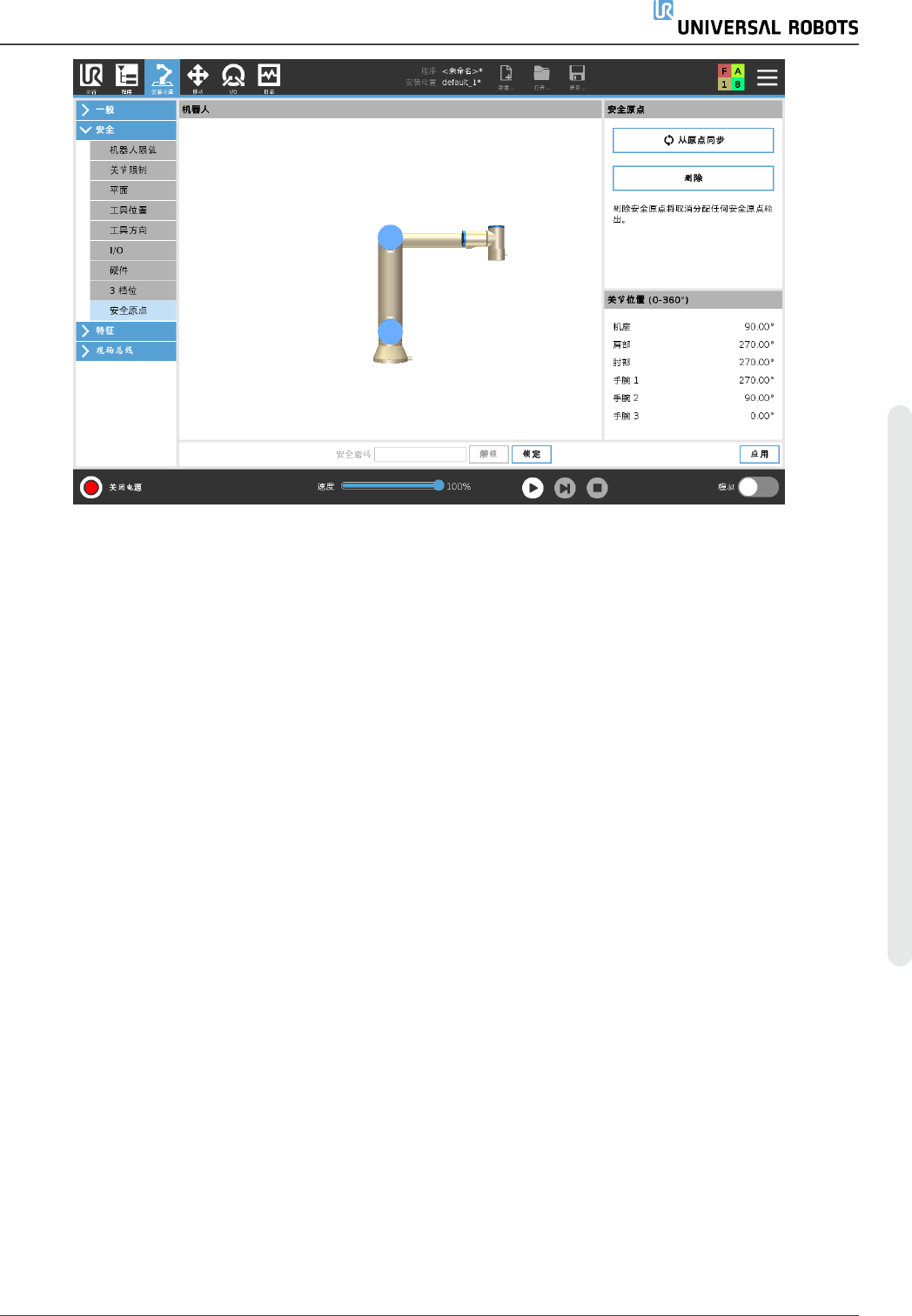
22.18.1. 与回零同步
1. 在页眉中,点按安装设置。
2. 在屏幕左侧的边栏菜单中,点按安全,然后选择安全原点。
3. 在安全原点下,点按与原点同步。
4. 点按应用,然后从弹出的对话框中选择应用并重启。
22.19. 安全回零输出
安全原点必须在安全原点输出之前定义( 请参阅22.16.2. 输出信号 在本页121) 。
22.19.1. 定义安全回零输出
1. 在页眉中,点按安装设置。
2. 在屏幕左侧的边栏菜单中,点按安全,然后选择 I/O。
3. 在输出信号的 I/O 屏幕上,从“功能分配”下的下拉菜单中选择安全原点。
4. 点按应用,然后从弹出的对话框中选择应用并重启。
22.20. 编辑安全回零
编辑安全回零不会自动修改预先定义的安全回零位置。如果这些数值不同步,则表示回零程
序节点未定义。
用 户 手 册 123 UR16e
22.安 全配 置
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。