99469_UR16e_User_Manual_zh_Global.pdf - 第139页
23 . 运 行 选 项 卡 运 行 选 项 卡 让 您 可 以 使 用 尽 可 能 少 的 按 钮 和 选 项 简 单 地 操 作 机 器 人 手 臂 和 控 制 箱 。 您 可 以 将 简 单 的 操 作 与 保 护 Poly S c ope 编 程 部 分 的 密 码 相 结 合 ( 请 参 阅 30. 3. 设 置 在 本 页 231 ) , 使 机 器 人 成 为 可 以 专 门 运 行 预 编 程 序 的 一 种 工 具…
23.运行选项卡
运行选项卡让您可以使用尽可能少的按钮和选项简单地操作机器人手臂和控制箱。您可以将
简单的操作与保护 PolyScope 编程部分的密码相结合( 请参阅30.3. 设置 在本页231) ,使机器
人成为可以专门运行预编程序的一种工具。
在此屏幕上,您可以基于外部输入信号沿过渡自动加载和启动默认程序( 请参阅25.7. 启动 在
本页194) 。
自动加载和启动默认程序以及加电时自动初始化的组合可用于将机器人手臂集成到其他机器
中。
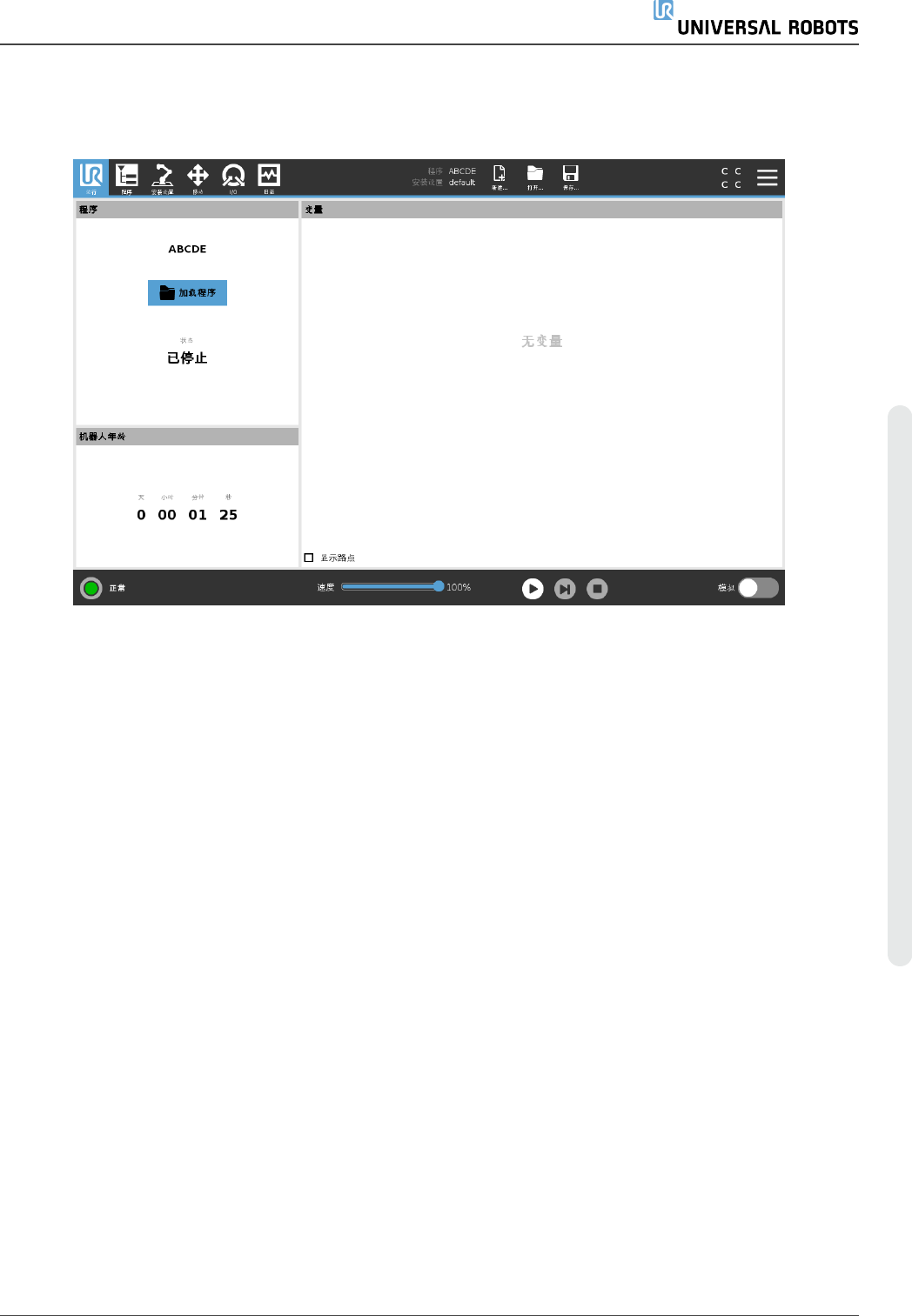
23.1. 程序
程序字段会显示加载到机器人上的程序的名称及其当前状态。您可以点按加载程序选项卡来
加载其他程序。
23.2. 变量
机器人程序可在运行时利用变量来存储和更新变量值。有两种变量可用:
安装变量
这些变量可以用于多个程序,其名称和值将与机器人安装设置一起持续存在( 请参阅25.6.
安装变量 在本页193) 。安装变量在机器人和控制箱重启后保持它们的值。
常规程序变量
这些变量仅适用于运行程序,且变量值在程序停止后即丢失。
显示路点
机器人程序使用脚本变量来存储有关路点的信息。
选中变量下的显示路点复选框,以在变量列表中显示脚本变量。
用 户 手 册 125 UR16e
23.运 行选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
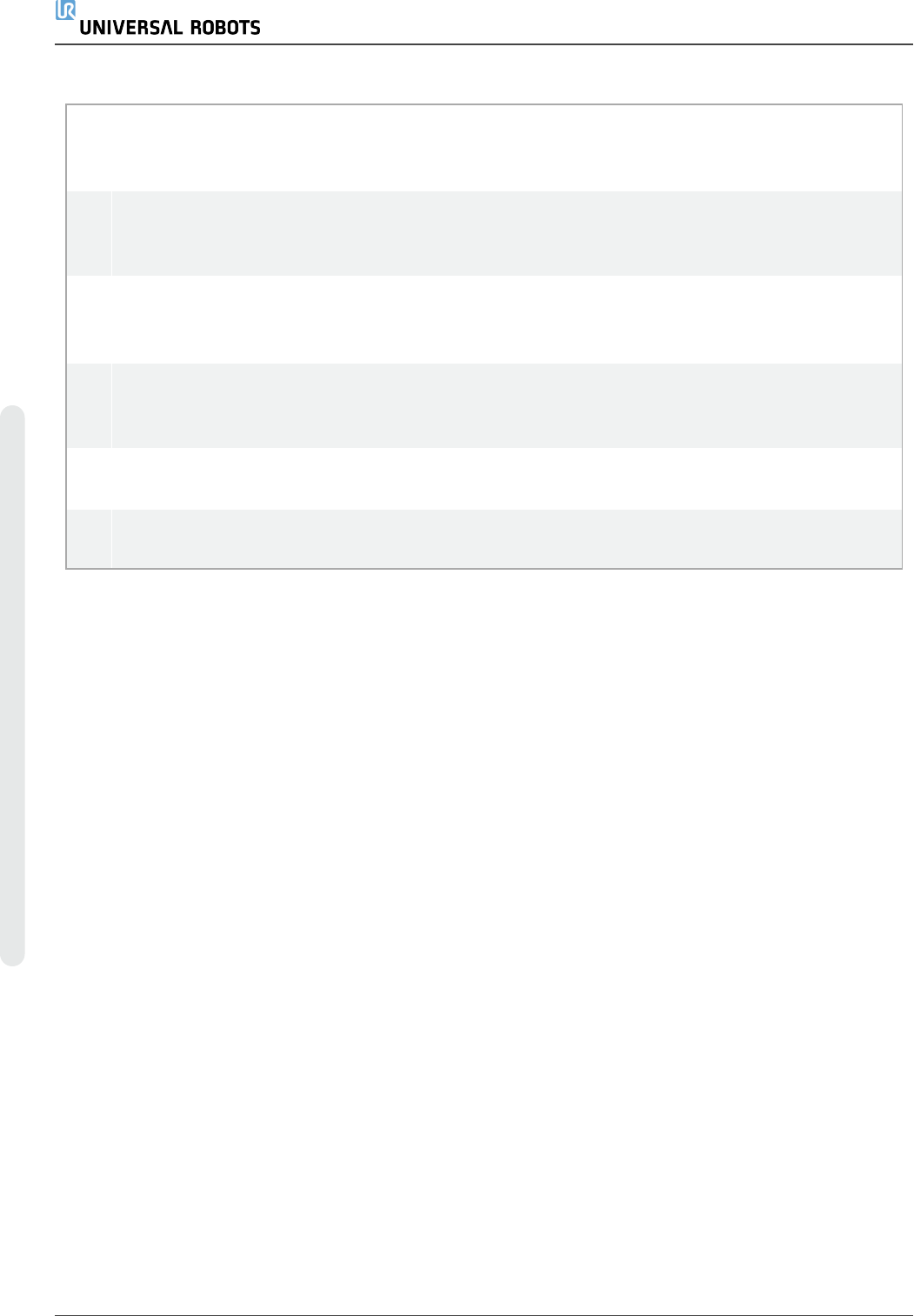
变量类型
布
尔
值
布尔变量,值为 True or False。
整
数
值
整数,范围为 − 2147483648 到 2147483647( 32 位) 。
浮
点
值
浮点数( 十进制) ( 32 位) 。
字
符
串
字符序列。
位
姿
矢量,指示笛卡尔空间中的位置和方向。这是表示方向的位置矢量 (
x
,
y
,
z
) 和旋转矢量
(
rx
,
ry
,
rz
) 的组合,书写形式为 p[x, y, z, rx, ry, rz]。
列
表
变量序列。
23.3. 机器人年龄
此字段表示自机器人最初打开以来的时间长度。此字段中的数字与程序运行时不相关
23.4. 将机器人移动就位
当机器人手臂必须在运行程序之前移动到特定的起始位置时,或者在修改程序时机器人手臂
正向某个路点移动时,访问将机器人移动就位屏幕。
如果将机器人移动就位屏幕无法将机器人手臂移动到程序起始位置,则会移动到程序树中的
第一个路点。
如果出现以下情况,机器人手臂可能会移动到不正确的位姿:
• 在执行第一次移动之前,第一次移动的 TCP、特征位姿或路点位姿会在程序执行期间改
变。
• 第一个路点位于 If 或 Switch 程序树节点内。
23.4.1. 访问将机器人移动就位屏幕
1. 在页脚中,点按播放以访问将机器人移动就位屏幕。
2. 按照屏幕上的说明与动画和真实机器人进行交互。
UR16e 126 用 户 手 册
23.运 行选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。