99469_UR16e_User_Manual_zh_Global.pdf - 第174页
24. 11.10 . 原 点 回 零 节 点 使 用 关 节 角 度 将 机 器 人 移 动 至 预 先 定 义 的 原 点 。 如 果 被 指 定 为 安 全 原 点 , 那 么 回 零 节 点 在 程 序 树 中 显 示 为 回 零 ( 安 全 ) 。 如 果 原 点 与 安 全 不 同 步 , 则 表 示 节 点 未 定 义 。 24 . 1 2. 模 板 24. 12.1. 码 垛 码 垛 是 一 种 很 容 易 编 程 码 …
开关情况结构可以指示机器人根据传感器输入或变量值来改变其行为。使用表达式编辑器描
述基本条件并定义机器人应继续执行此开关命令的子命令的情况。如果行被评估与一种情况
匹配,将执行情况中的行。如果已指定默认情况,只有找不到其他匹配的情况时,行才会执
行。
可以从该开关的屏幕上移除各个Switch can have several Cases and one Default Case.
Switches can only have one instance of any Case values defined. Cases can be added using the
buttons on the screen. A Case命令。
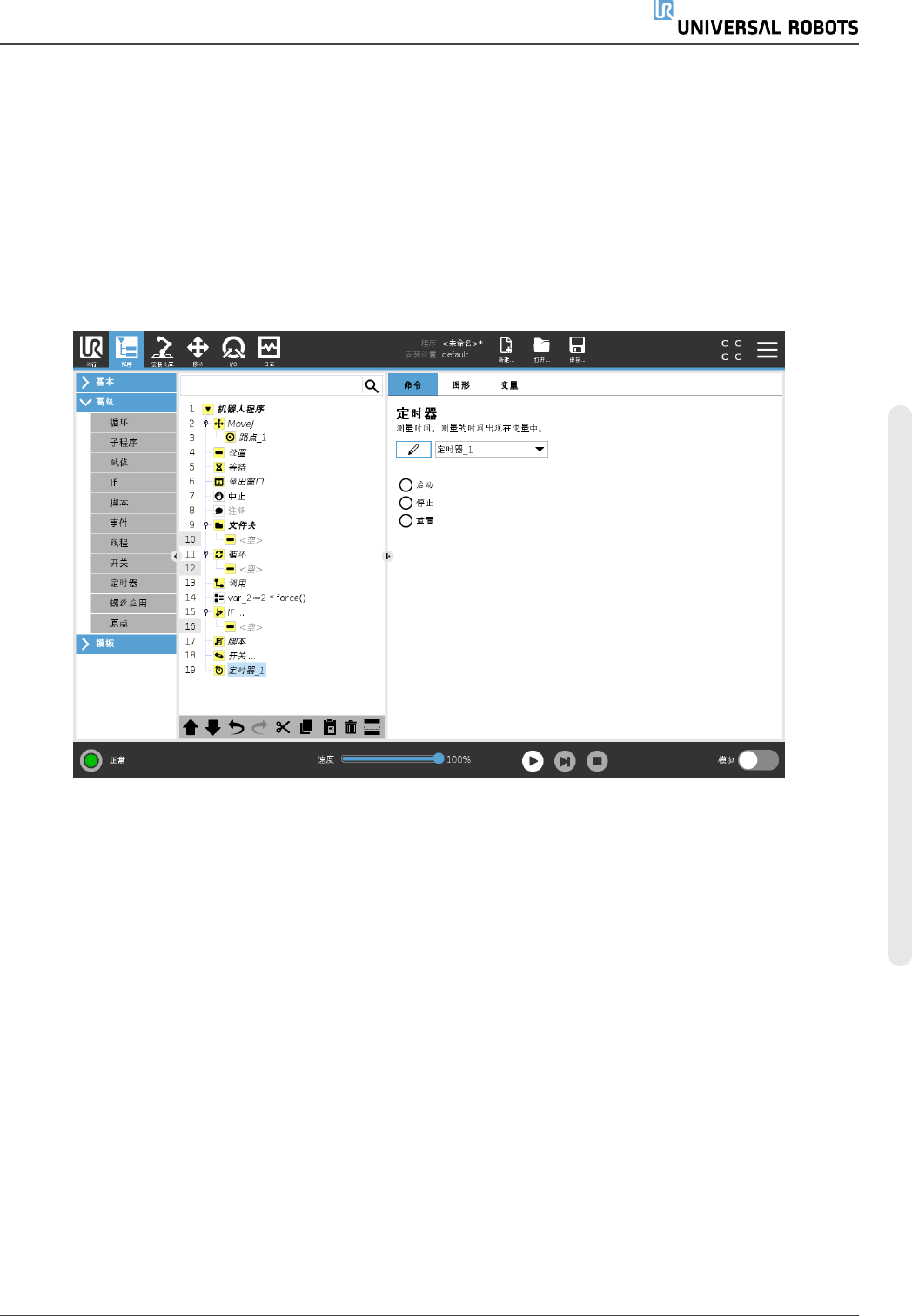
24.11.9. 定时器
定时器测量程序特定部件运行所需的时间长度。程序变量包含自计时器启动以来经过的时
间,可在“变量”选项卡和“运行”选项卡中看到。
用 户 手 册 159 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
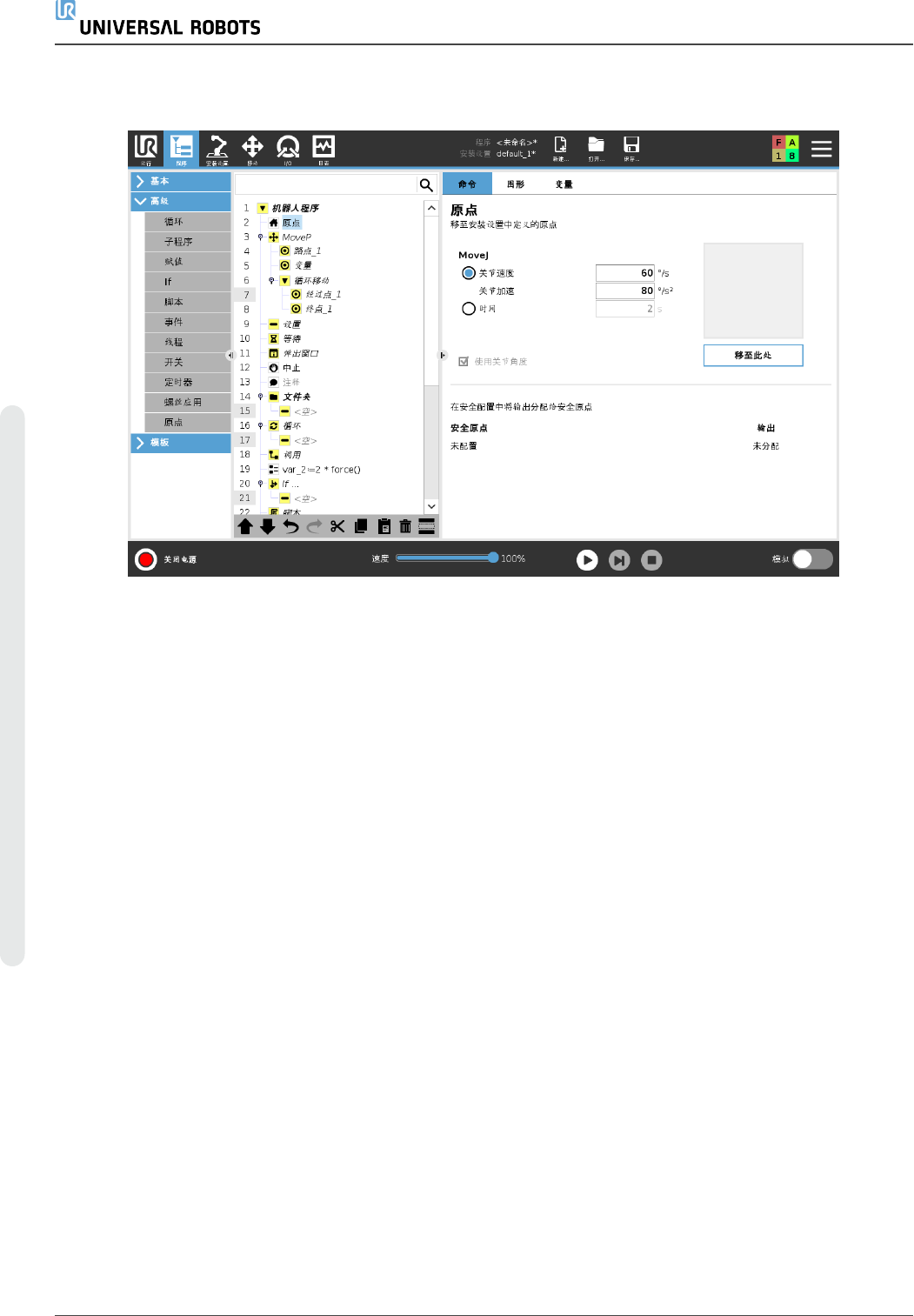
24.11.10. 原点
回零节点使用关节角度将机器人移动至预先定义的原点。如果被指定为安全原点,那么回零
节点在程序树中显示为回零( 安全) 。如果原点与安全不同步,则表示节点未定义。
24.12. 模板
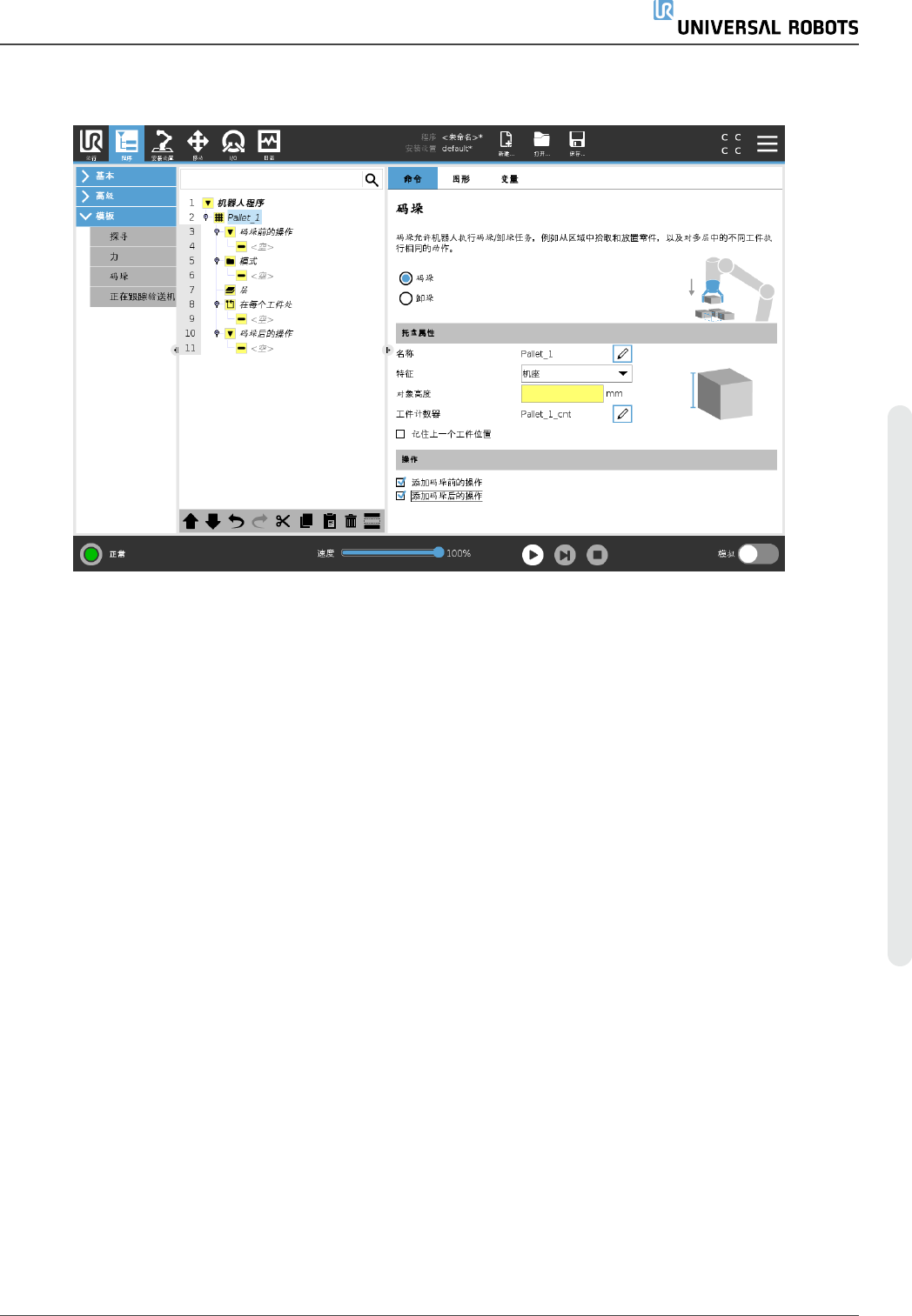
24.12.1. 码垛
码垛是一种很容易编程码垛和卸垛任务,挑选和放置零件(即从托盘,固定装置等) ,并让机器
人对不同模式的多层中的不同物品执行可重复操作的模板。您可以创建不同的模式并应将它
们用于特定图层。您也可以在每层之间放置分隔板( 请参阅在码垛序列中的层之间添加分离
器 在本页164) 。此外,您可以使用码垛属性中的功能轻松调整码垛的放置位置。要了解特征,
请参阅25.17. 特征 在本页202 。按照下节创建码垛程序的说明来使用码垛模板。
UR16e 160 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
创 建 码 垛 程 序
1. 决定您是要示教特征( 请参阅25.17. 特征 在本页202) 还是要将机座用作参考平面。
2. 在程序选项卡的模板下,点按码垛。
3. 在码垛屏幕上,根据所需操作选择以下操作之一。
1. 选择码垛可将物品移到托盘上。
2. 选择卸垛可从托盘中移除物品。
4. 在码垛属性下,为您的程序指定名称、特征( 见步骤 1) 、物品高度和物品计数器名称。如
果希望机器人在停止处理的物品处重新启动,请选择记住上一个物品位置框。
5. 在“码垛”屏幕上的动作下,通过选择以下项添加要在码垛序列之前或之后执行的其他动
作:
1. 添加码垛前的动作:这些动作在开始码垛之前执行。
2. 添加码垛后的动作:这些动作在完成码垛后执行。
6. 在程序树上,点按模式节点以指定层的模式。您可以创建以下类型的模式:线型、网格或
不规则( 见下图) 。在此屏幕上,您可以选择是否要在层之间加入分隔板( 请参阅在码垛
序列中的层之间添加分离器 在本页164) 。
7. 点击程序树上的模式节点来教机器人分层特定的位置(例如,开始/结束点、网格角和/或
项目数量)。有关示教说明,请参阅24.10.1. 移动 在本页136。必须教授在托盘底部的所有
位置。要复制模式,请在要复制的模式节点屏幕上点按复制模式按钮。
用 户 手 册 161 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。