99469_UR16e_User_Manual_zh_Global.pdf - 第94页
SF# an d Safety Func ti o n D e s c ri pti on What hap pen s ? Tol e- ranc e PFH d Affec ts SF7 Force Lim i t (TC P) The Force Lim it is the force exe rted by the robot at the TC P (tool cent er poi nt) an d “ e lb ow ”.…
SF# and
Safety
Function
Description What happens?
Tole-
rance
PFHd Affects
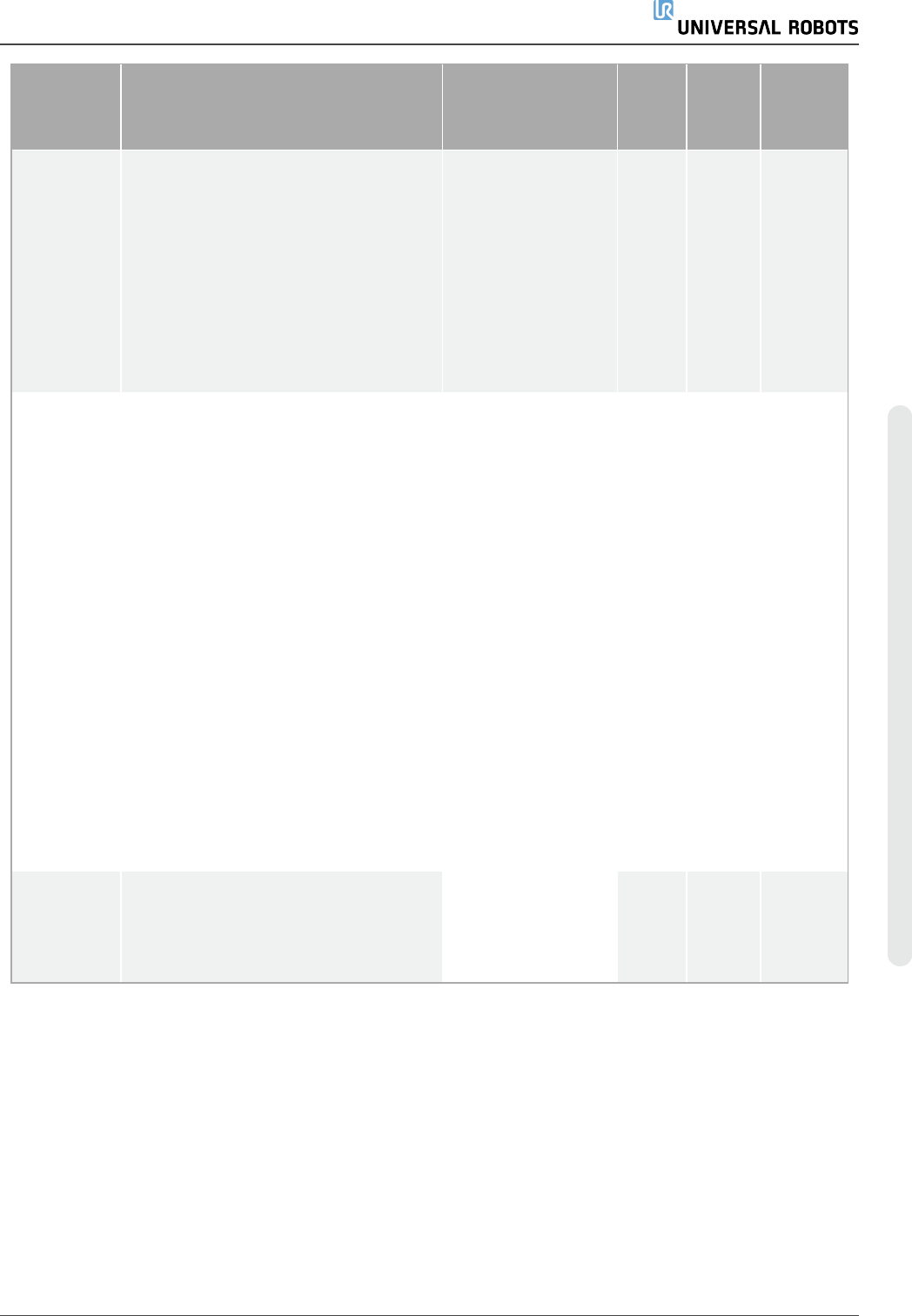
Joint
Torque
Limit
Exceeding the internal joint torque
limit (each joint) results in a Cat 0
stop3. This is shown as SF #5 in the
Generation 3 (CB3) UR robots. This
is not accessible to the user; it is a
factory setting. It is NOT shown as a
safety function because there are no
user settings and no user
configuration possibilities.
- - - -
SF5
Called
various
names:
Pose Limit,
Tool Limit,
Orientation
Limit,
Safety
Planes,
Safety
Boundaries
Monitors the TCP Pose (position and
orientation) and will prevent
exceeding a safety plane or TCP
Pose Limit. Multiple pose limits are
possible (tool flange, elbow, and up to
2 configurable tool offset points with a
radius) Orientation restricted by the
deviation from the feature Z direction
of the tool flange OR the TCP. This
safety function consists of two parts.
One is the safety planes for limiting
the possible TCP positions. The
second is the TCP orientation limit,
which is entered as an allowed
direction and a tolerance. This
provides TCP and wrist inclusion/
exclusion zones due to the safety
planes.
Will not allow
motion to exceed
any limit settings.
Speed or torques
could be reduced
so motion will not
exceed any limit. A
protective stop will
be initiated to
prevent exceeding
any limit. Will not
allow motion to
exceed any limit
settings.
3 °
40
mm
1.20E-
07
TCP
Tool
flange
Elbow
SF6
Speed
Limit TCP
& Elbow
Monitors the TCP and elbow speed
to prevent exceeding a speed limit.
50
mm/s
1.20E-
07
TCP
用 户 手 册 79 UR16e
17.安 全功 能表
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
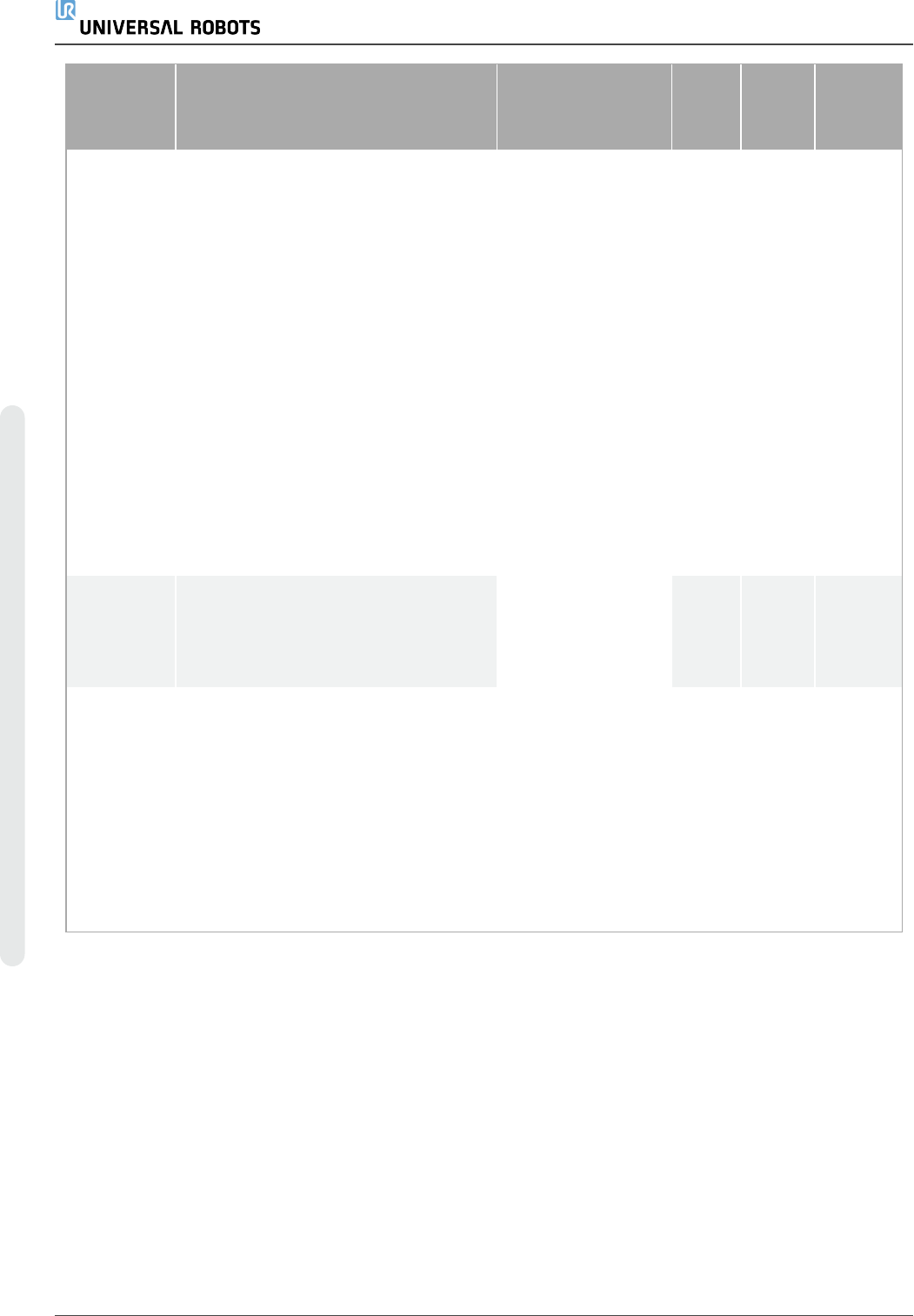
SF# and
Safety
Function
Description What happens?
Tole-
rance
PFHd Affects
SF7
Force Limit
(TCP)
The Force Limit is the force exerted
by the robot at the TCP (tool center
point) and “elbow”. The safety
function continuously calculates the
torques allowed for each joint to stay
within the defined force limit for both
the TCP & the elbow. The joints
control their torque output to stay
within the allowed torque range. This
means that the forces at the TCP or
elbow will stay within the defined
force limit. When a monitored stop is
initiated by the Force Limit SF, the
robot will stop, then “back-off” to a
position where the force limit was not
exceeded. Then it will stop again.
Will not allow
motion to exceed
any limit settings.
Speed or torques
could be reduced
so motion will not
exceed any limit. A
protective stop will
be initiated to
prevent exceeding
any limit. Will not
allow motion to
exceed any limit
settings.
25N
1.50E-
07
TCP
SF8
Momentum
Limit
The momentum limit is very useful for
limiting transient impacts. The
Momentum Limit affects the entire
robot.
3 kg
m/s
1.20E-
07
Robot
SF9
Power
Limit
This function monitors the
mechanical work (sum of joint
torques times joint angular speeds)
performed by the robot, which also
affects the current to the robot arm as
well as the robot speed. This safety
function dynamically limits the
current/ torque but maintains the
speed.
Dynamic limiting of
the current/torque
10 W
1.50E-
07
Robot
UR16e 80 用 户 手 册
17.安 全功 能表
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
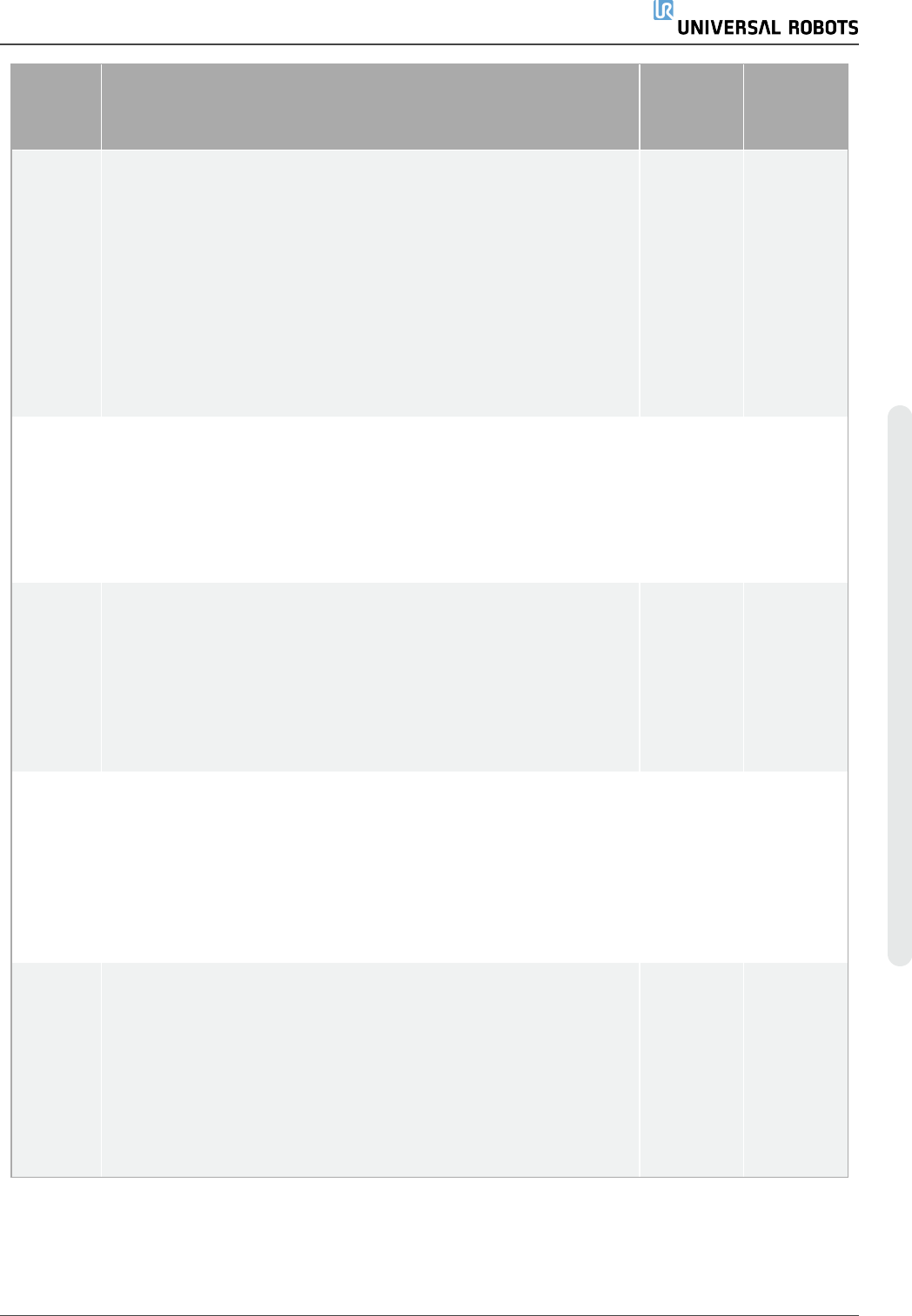
SF# and
Safety
Function
Description PFHd Affects
SF10
UR
Robot
Estop
Output
When configured for Estop output and there is an Estop
condition (see SF1), the dual outputs are LOW. If there is no
Estop condition, dual outputs are high. Pulses are not used but
they are tolerated. For the integrated functional safety rating with
an external Estop device, add the PFHd of the UR Estop
function (SF0 or SF1) to the PFHd of the external logic (if any)
and its components (e.g. Estop pushbutton).
For the Estop Output, validation is performed at the external
equipment, as the UR output is an input to this external
equipment.
4.70E-08
External
connection
to logic
and/or
equipment
SF11
UR
Robot
Moving:
Digital
Output
Whenever the robot is moving (motion underway), the dual
digital outputs are LOW. Outputs are HIGH when no movement.
The functional safety rating is for what is within the UR robot.
The integrated functional safety performance requires adding
this PFHd to the PFHd of the external logic (if any) and its
components.
1.20E-07
External
connection
to logic
and/or
equipment
SF12
UR
Robot
Not
stopping:
Digital
Output
Whenever the robot is STOPPING (in process of stopping or in a
stand-still condition) the dual digital outputs are HIGH. When
outputs are LOW, robot is NOT in the process or stopping and
NOT in a stand-still condition. The functional safety rating is for
what is within the UR robot. The integrated functional safety
performance requires adding this PFHd to the PFHd of the
external logic (if any) and its components.
1.20E-07
External
connection
to logic
and/or
equipment
SF13
UR
Robot
Reduced
Mode:
Digital
Output
Whenever the robot is in reduced mode (or reduced mode is
initiated), the dual digital outputs are LOW. See below. The
functional safety rating is for what is within the UR robot. The
integrated functional safety performance requires adding this
PFHd to the PFHd of the external logic (if any) and its
components.
1.20E-07
External
connection
to logic
&/or
equipment
SF14
UR
Robot
Not
Reduced
Mode:
Digital
Output
Whenever the robot is NOT in reduced mode (or the reduced
mode is not initiated), the dual digital outputs are LOW. The
functional safety rating is for what is within the UR robot. The
integrated functional safety performance requires adding this
PFHd to the PFHd of the external logic (if any) and its
components.
1.20E-07
External
connection
to logic
&/or
equipment
用 户 手 册 81 UR16e
17.安 全功 能表
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。