99469_UR16e_User_Manual_zh_Global.pdf - 第190页
24. 13.2. 远 程 TC P 移 动 类 型 R T C P_ M o v e P 与 常 规 Mo ve P 类 似 , R TCP _M ov eP 定 义 机 器 人 手 臂 相 对 于 远 程 TC P 移 动 的 工 具 速 度 和 加 速 度 。 请 参 见 25.2 . TCP 配 置 在 本 页 185 。 R T C P 圆 形 移 动 与 常 规 圆 周 移 动 类 似 , 可 以 将 R TC P 圆 周 …
与常规 TCP( 请参阅25.2. TCP 配置 在本页185) 类似,您可以在“安装设置”选项卡的“设置”中定
义和命名 RTCP。您还可以完成以下操作:
• 添加、重命名、修改和删除RTCP
• 理解默认RTCP和激活RTCP
• 示教 RTCP位置
• 复制 RTCP方向
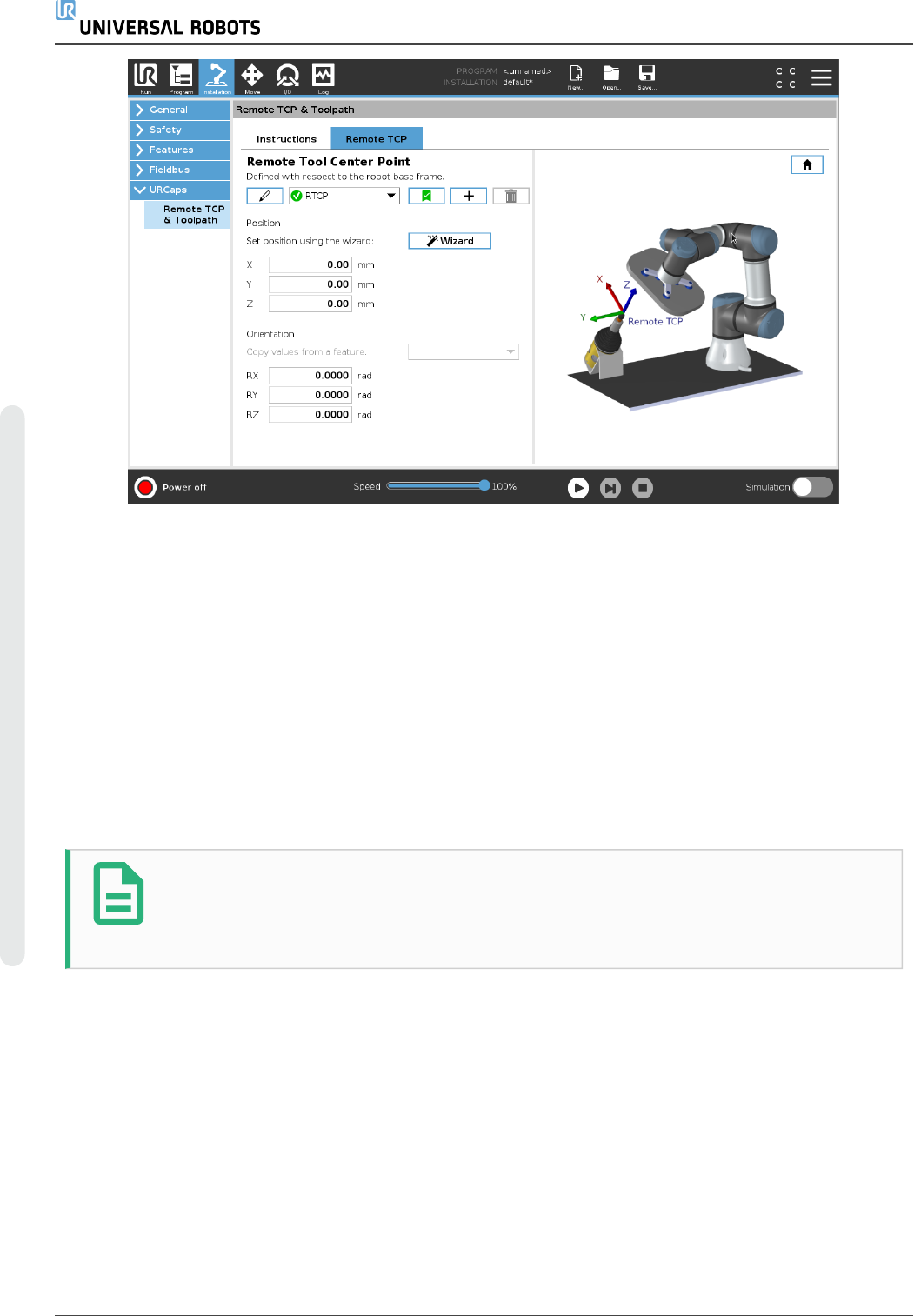
从 功 能 设 置 RTCP
使用功能设置RTCP,允许机器人相对于RTCP缓慢移动,同时创建RTCP路点和RTCP圆形移
动。
1. 点按加号图标创建新的 RTCP RTCP。或者在下拉菜单中选择现有的RTCP。
2. 点按从点特征复制值下拉菜单,然后选择一个特征。验证RTCP方向值更新来匹配已选
择功能方向值。
用 户 手 册 175 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
24.13.2. 远程TCP移动类型
RTCP_MoveP
与常规 MoveP 类似,RTCP_MoveP 定义机器人手臂相对于远程 TCP 移动的工具速度和加速
度。请参见25.2. TCP 配置 在本页185。
RTCP圆 形 移 动
与常规圆周移动类似,可以将 RTCP 圆周移动添加到 RTCP_MoveP 中以做圆周移动。请参见
25.2. TCP 配置 在本页185。
提示
圆形移动的最大速度可能小于特定值。圆形半径为
r
,最大加速度为
A
,并且由
于向心加速度,最大速度不能超过
Ar
。
24.13.3. 远程 TCP 路点
与常规路点类似,RTCP路点允许工具使用恒速和圆形混合做线性移动。所有路点使用相同的
默认交融半径。较小的混合半径会使路径转角更大。较大的混合半径会使路径转角更小。通过
将机器人手臂实际移至相应位置来示教RTCP路点。
UR16e 176 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
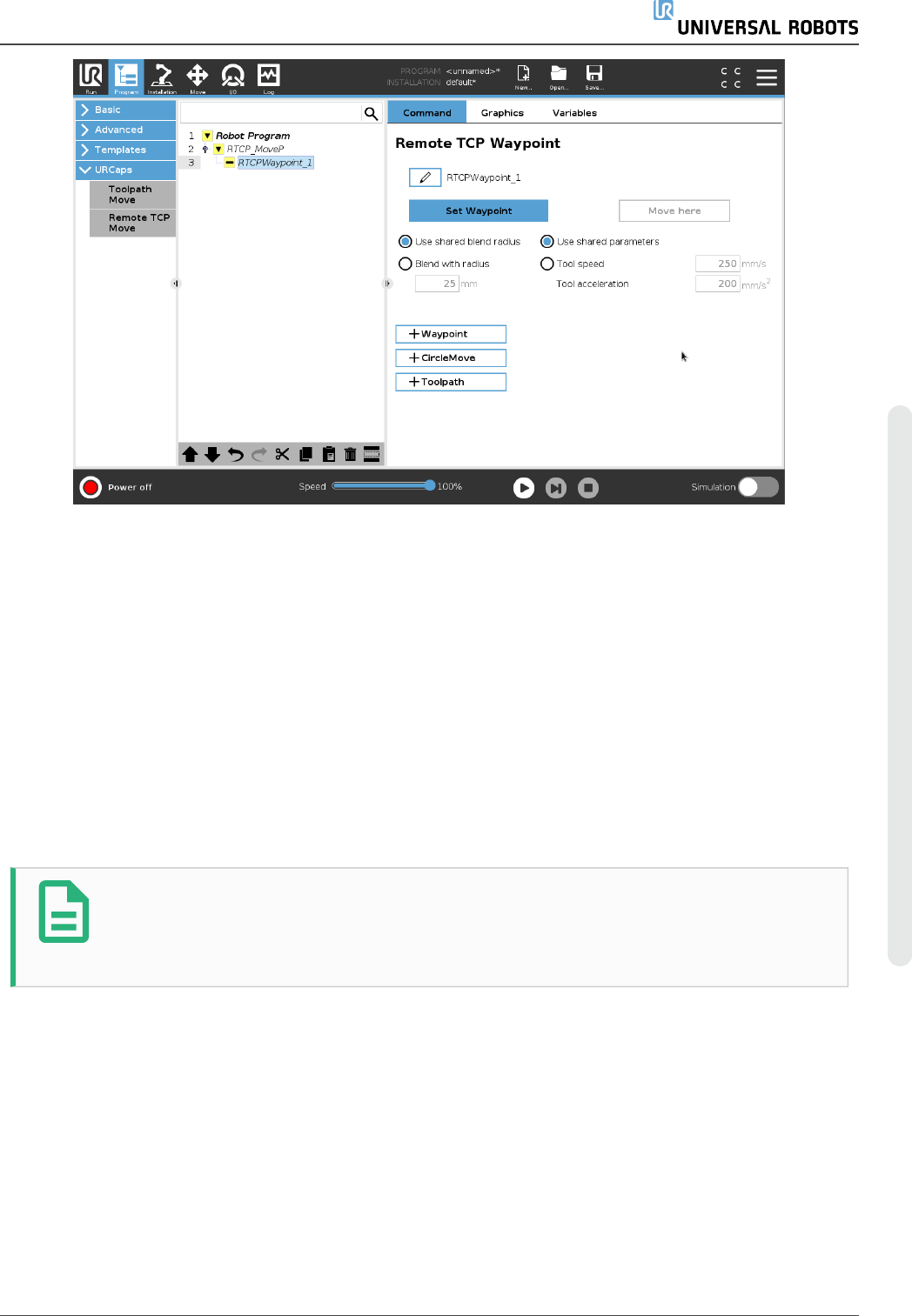
示 教 RTCP路 点
1. 在“程序”选项卡中,插入一个 RTCP_MoveP 节点。
2. 在 RTCP_MoveP 节点上,点按设置打开“移动”屏幕。
3. 在“移动”屏幕上,使用示教模式或缓慢移动将机器人定位于所需的配置。
4. 点击绿色复选标记进行验证。
配 置 RTCP路 点
使用交融使机器人能够在两个轨迹之间平顺过渡。点按使用共享交融半径或点按与半径交
融,为来自 RTCP_MoveP 的路点设置交融半径。
提示
物理时间节点( 如移动、等待) 节点不能用作 RTCP_MoveP 节点的子节点。如果
将不支持的节点作为子节点添加到 RTCP_MoveP 节点,程序无法通过验证。
24.13.4. 远程 TCP 工具路径
远程 TCP 和工具路径 URCap 会自动生成机器人运动,从而更容易准确地跟踪复杂的轨迹。
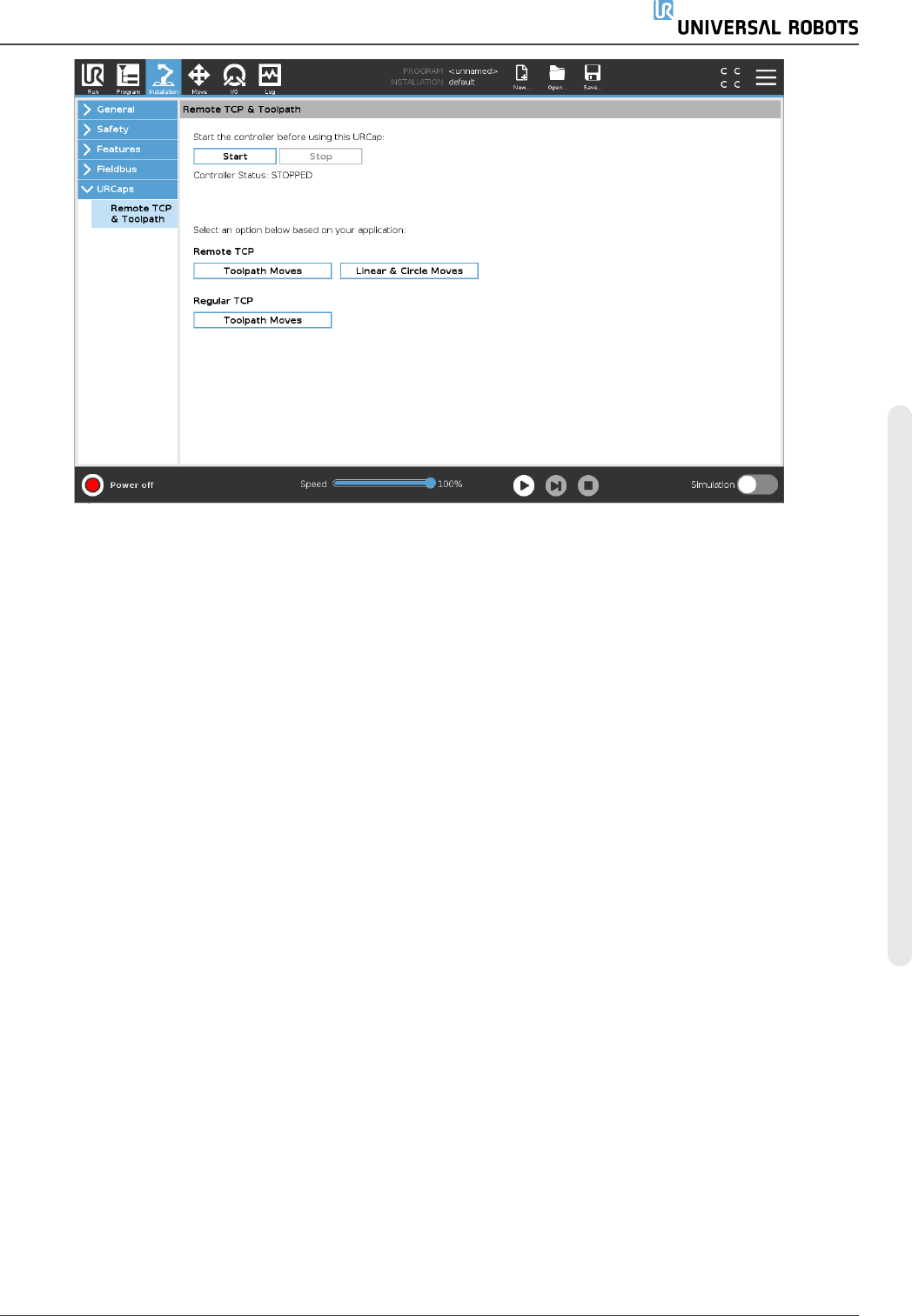
配 置 远 程 TCP 工 具 路 径
1. 在“远程 TCP 和工具路径 URCap”主页上选择远程 TCP 工具路径移动以进入工作流。
2. 按照说明选项卡下的说明进行操作。
远程 TCP 工具路径移动需要以下主要控件:
用 户 手 册 177 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。