99469_UR16e_User_Manual_zh_Global.pdf - 第172页
24. 11.7. 线 程 线 程 是 机 器 人 程 序 的 一 个 并 行 进 程 。 线 程 可 用 于 控 制 与 机 器 人 手 臂 无 关 的 外 部 机 器 。 线 程 可 以 通 过 变 量 和 输 出 信 号 和 机 器 人 程 序 进 行 通 信 。 24. 11.8. 开 关 U R16 e 1 5 8 用 户 手 册 2 4 . 程 序 选 项 卡 版 权 所 有 © 2 009–2021U ni ver s…
• 行允许您使用表达式编辑器( 24.3. 表达式编辑器 在本页131) 编写单行 URscript 代码
• 文件允许您编写、编辑或加载 URscript 文件。
您可以在支持网站 (http://www.universal-robots.com/support) 上的脚本手册中找到编写 URscript
的说明。
URscript 文件中注明的功能和变量可在整个程序中通过 PolyScope 使用。
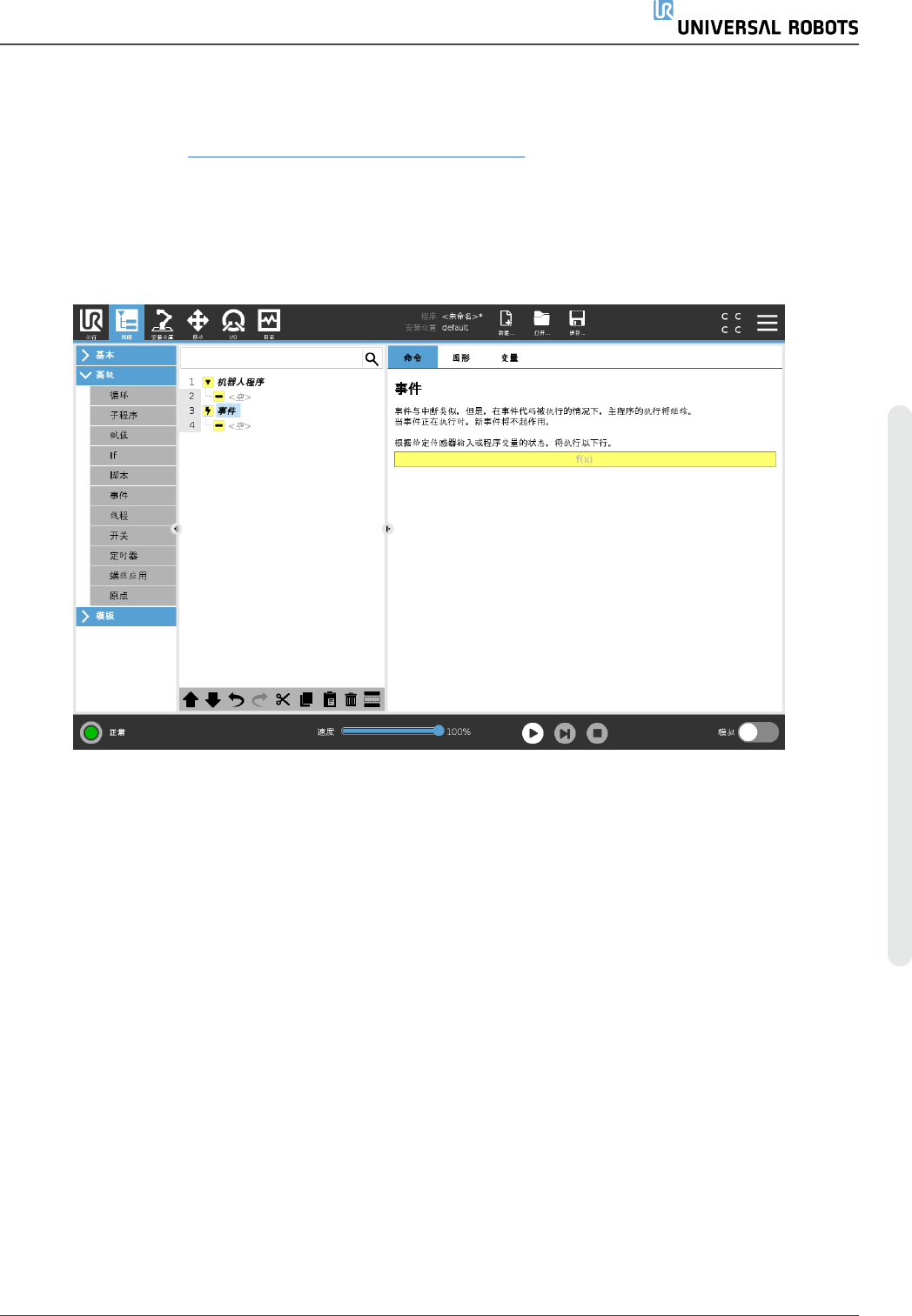
24.11.6. 事件
“事件”命令可用于监控输入信号,以及在输入信号呈高电平时执行某个动作或设置变量。例
如,当输出信号呈高电平时,事件程序可等待 200ms,然后将其重新设置为低电平。这样,如
果外部机器上的触发机制是上升沿而非高输入电平时,主程序代码要简单得多。每个控制周
期 (2ms) 对事件进行一次检查。
用 户 手 册 157 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
24.11.7. 线程
线程是机器人程序的一个并行进程。线程可用于控制与机器人手臂无关的外部机器。线程可
以通过变量和输出信号和机器人程序进行通信。
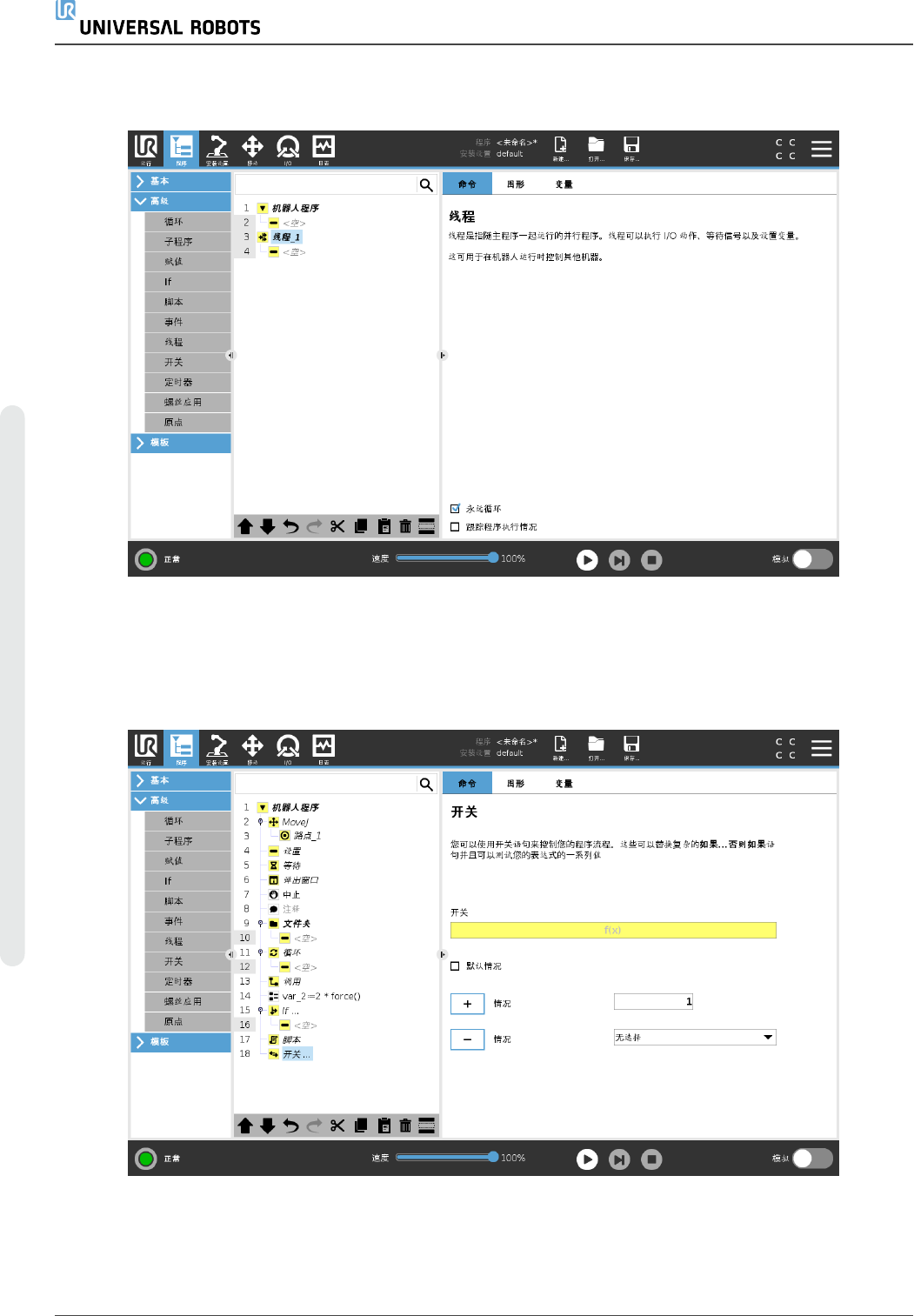
24.11.8. 开关
UR16e 158 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
开关情况结构可以指示机器人根据传感器输入或变量值来改变其行为。使用表达式编辑器描
述基本条件并定义机器人应继续执行此开关命令的子命令的情况。如果行被评估与一种情况
匹配,将执行情况中的行。如果已指定默认情况,只有找不到其他匹配的情况时,行才会执
行。
可以从该开关的屏幕上移除各个Switch can have several Cases and one Default Case.
Switches can only have one instance of any Case values defined. Cases can be added using the
buttons on the screen. A Case命令。
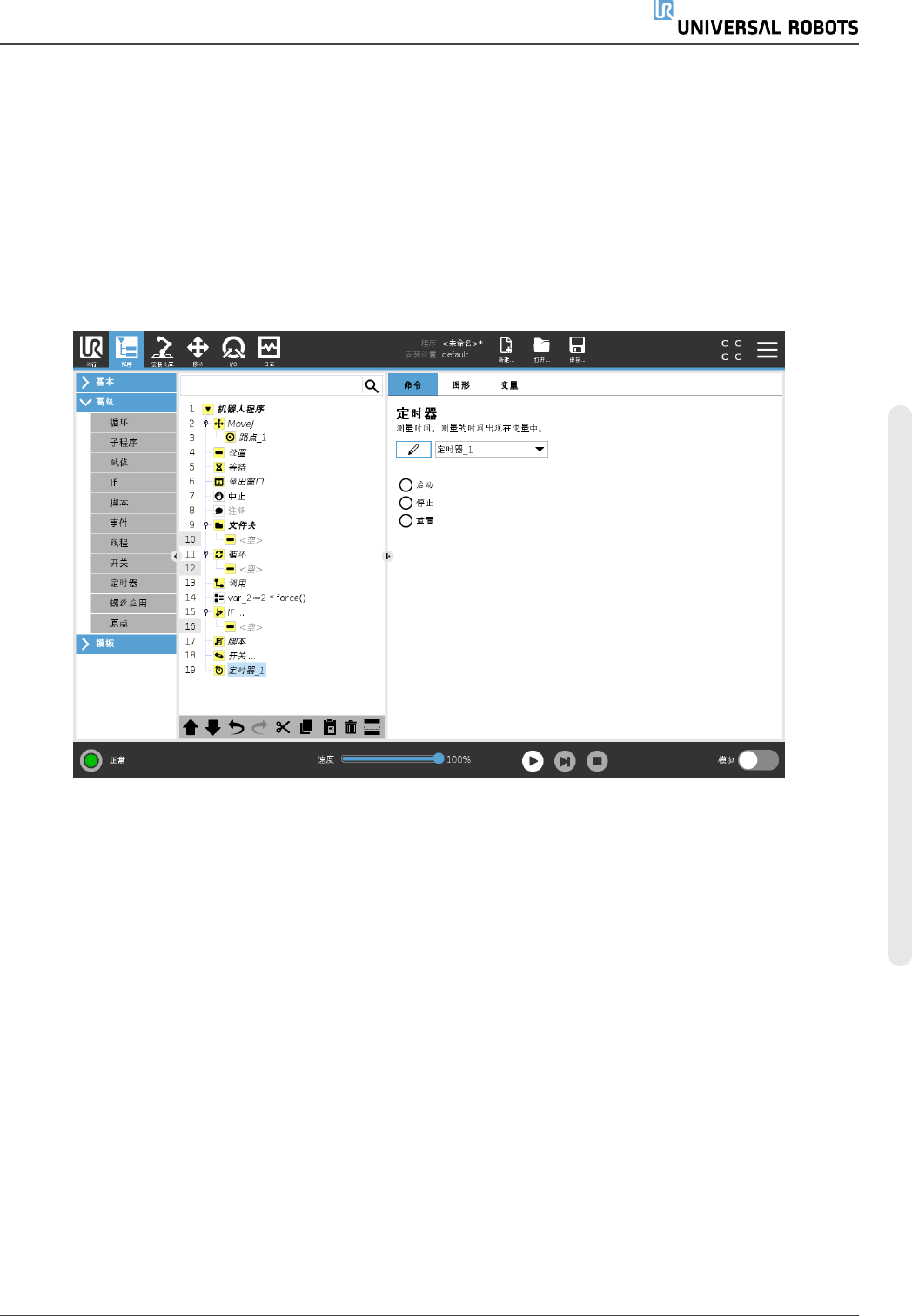
24.11.9. 定时器
定时器测量程序特定部件运行所需的时间长度。程序变量包含自计时器启动以来经过的时
间,可在“变量”选项卡和“运行”选项卡中看到。
用 户 手 册 159 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。