99469_UR16e_User_Manual_zh_Global.pdf - 第71页
关 节 1( 肩 部 ) 的 停 止 距 离 载 荷 为 最 大 载 荷 16 kg 的 停 止 距 离 ( 米 ) 关 节 1( 肩 部 ) 的 停 止 时 间 载 荷 为 16k g 的 33% 的 停 止 时 间 ( 秒 ) 载 荷 为 16k g 的 66% 的 停 止 时 间 ( 秒 ) 载 荷 为 最 大 载 荷 16 kg 的 停 止 时 间 ( 秒 ) 用 户 手 册 5 7 UR 1 6 e 1 1 . 制 动 时…
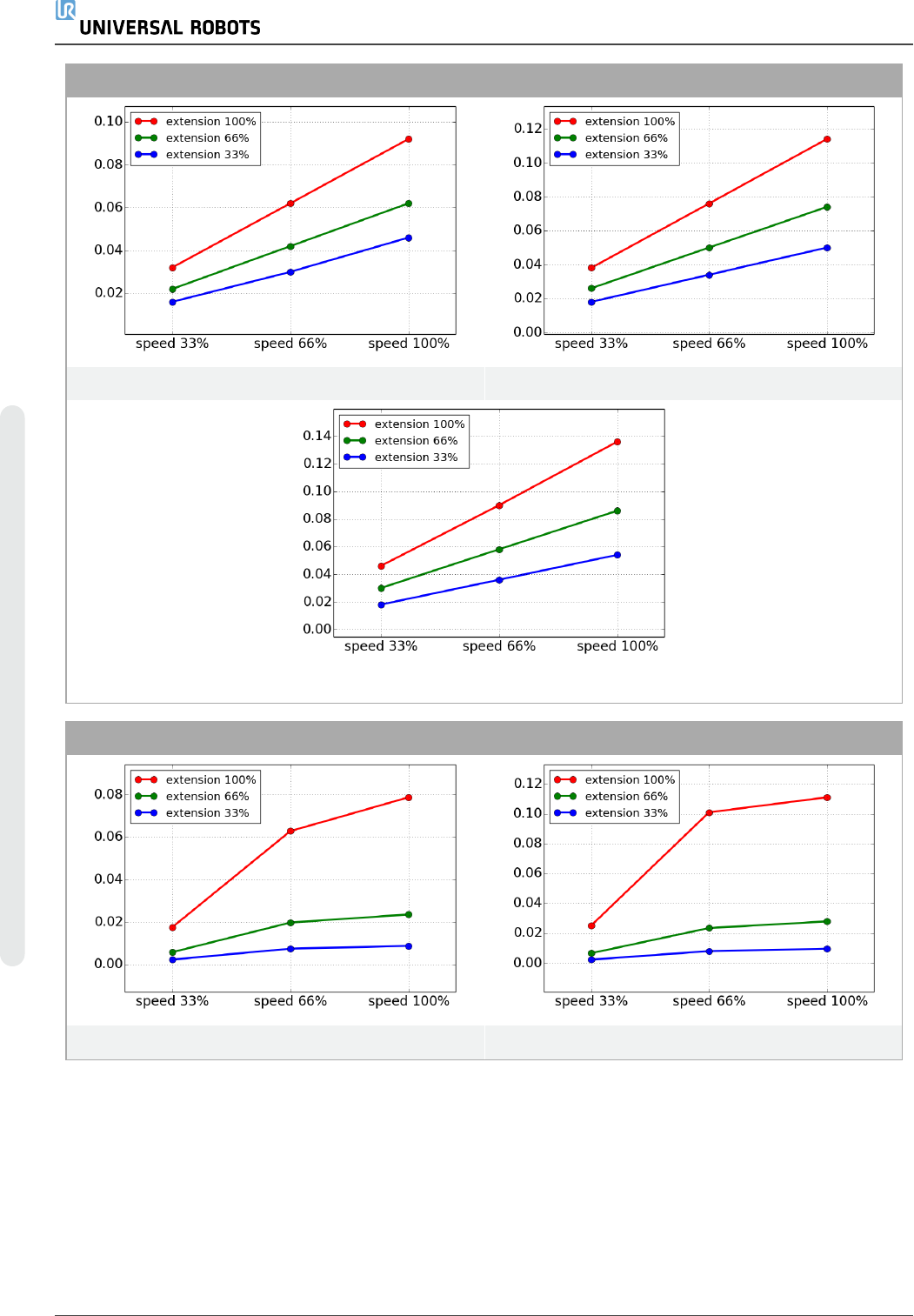
关节 0( 底座) 的停止时间
载荷为 16kg 的 33% 时的停止时间( 秒) 载荷为 16kg 的 66% 时的停止时间( 秒)
载荷为最大载荷 16kg 的停止时间( 秒)
关节 1( 肩部) 的停止距离
载荷为 16kg 的 33% 的停止距离( 米) 载荷为 16kg 的 66% 的停止距离( 米)
UR16e 56 用 户 手 册
11.制 动时 间和 制动 距离
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
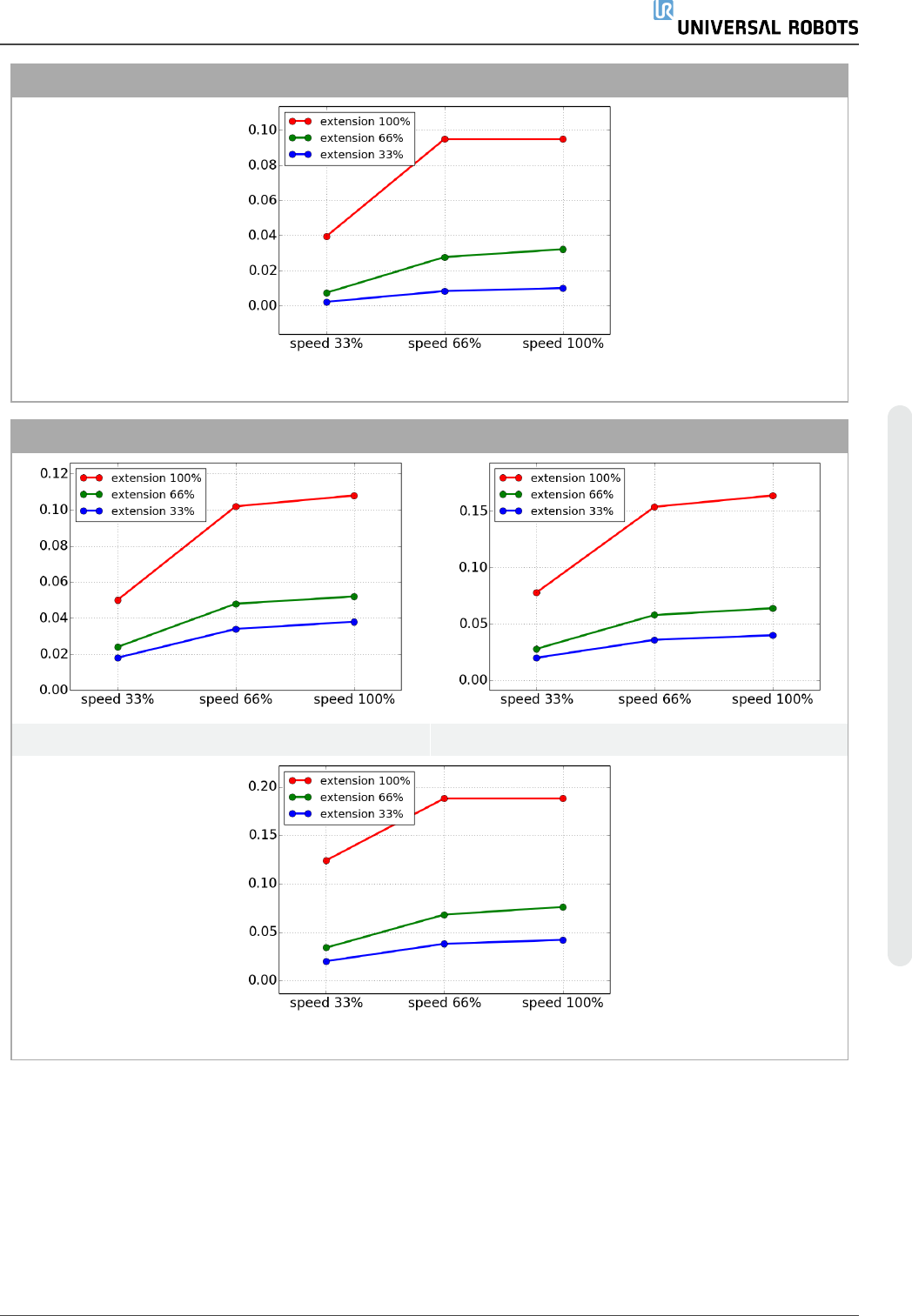
关节 1( 肩部) 的停止距离
载荷为最大载荷 16kg 的停止距离( 米)
关节 1( 肩部) 的停止时间
载荷为 16kg 的 33% 的停止时间( 秒) 载荷为 16kg 的 66% 的停止时间( 秒)
载荷为最大载荷 16kg 的停止时间( 秒)
用 户 手 册 57 UR16e
11.制 动时 间和 制动 距离
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
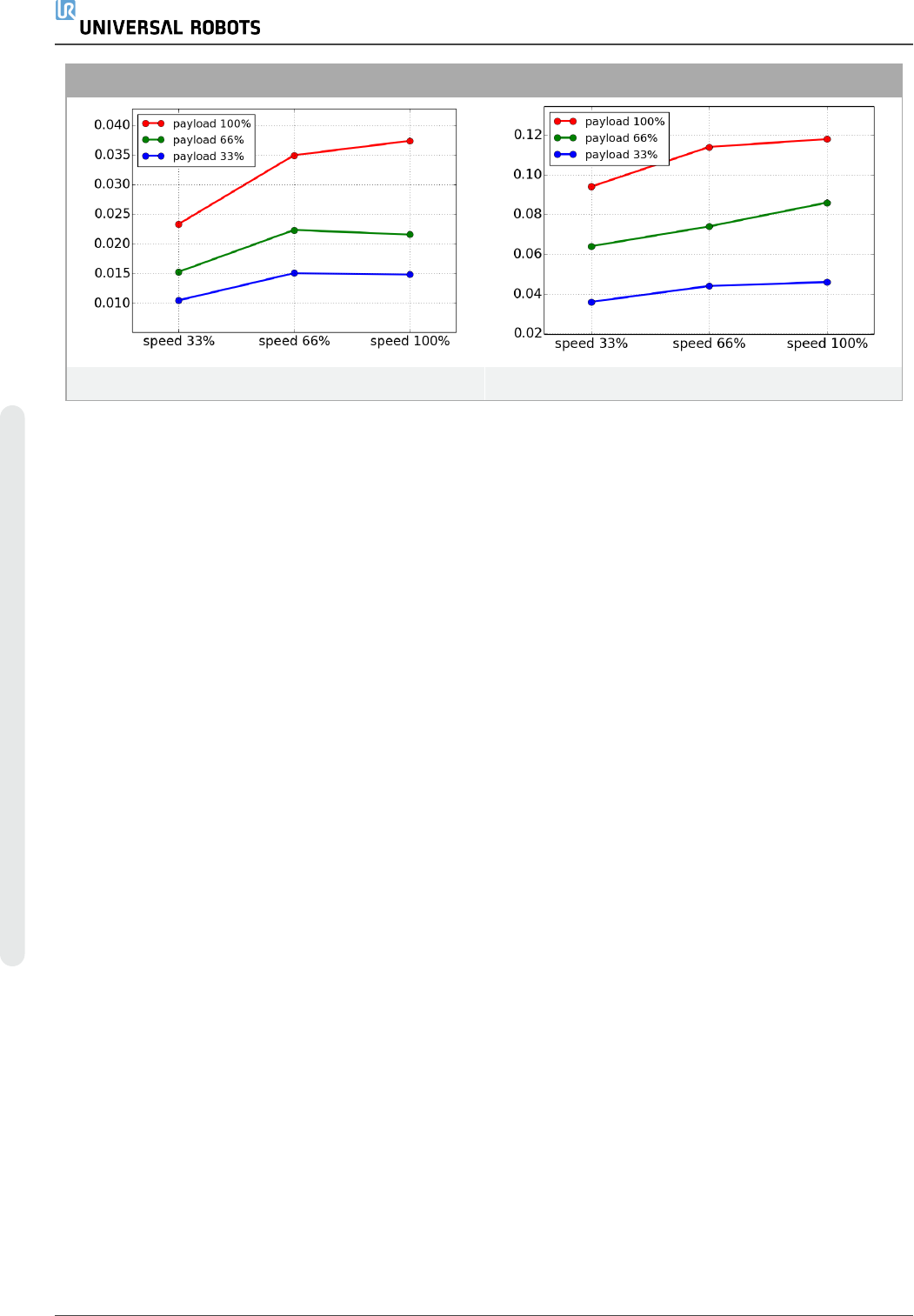
关节 2( 肘部) 的停止距离和时间
所有有效载荷的停止距离( 米) 所有有效载荷的停止时间( 秒)
UR16e 58 用 户 手 册
11.制 动时 间和 制动 距离
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。