99469_UR16e_User_Manual_zh_Global.pdf - 第89页
16 . 技 术 规 格 机 器 人 类 型 U R16e 重 量 33. 1 kg / 72 .9 l b 最 大 有 效 载 荷 16 kg / 35 .2 l b 延 伸 900 mm / 35. 4 in 关 节 范 围 ± 360 ° for al l joi nts Speed 机 座 和 肩 部 关 节 : 最 大 为 120 ° /s 。 所 有 其 他 关 节 : 最 大 为 180 °/s …
第 2-1 部分:试验 - 试验 A:冷态
第 2-2 部分:试验 - 试验 B:干热
第 2-27 部分:试验 - 试验 Ea 和导则:冲击
第 2-64 部分:试验 - 试验 Fh:宽带随机振动和导则
UR 机器人根据这些标准中规定的试验方法进行试验。
IEC 61784-3:2010
EN 61784-3:2010 [SIL 2]
工业通信网络 - 配置文件
第 3 部分:功能安全现场总线 - 一般规则和配置文件定义
这项标准规定了额定安全的通信总线的要求。
IEC 61784-3:2010
EN 61784-3:2010 [SIL 2]
机械安全 - 机械的电气设备
第 1 部分:一般要求
应用此标准的一般原则。
IEC 60664-1:2007
IEC 60664-5:2007
EN 60664-1:2007 [2006/95/EC]
EN 60664-5:2007
低压系统内设备的绝缘配合
第 1 部分:原则、要求和测试
第 5 部分:确定间隙和爬电距离等于或小于 2 mm 的综合方法
UR 机器人的电路根据此标准设计。
EUROMAP 67:2015, V1.11
Electrical Interface between Injection Molding Machine and Handling Device / Robot
配备 E67 附件模块的 UR 机器人根据此标准与注塑机交互。
UR16e 74 用 户 手 册
15.应 用标 准
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
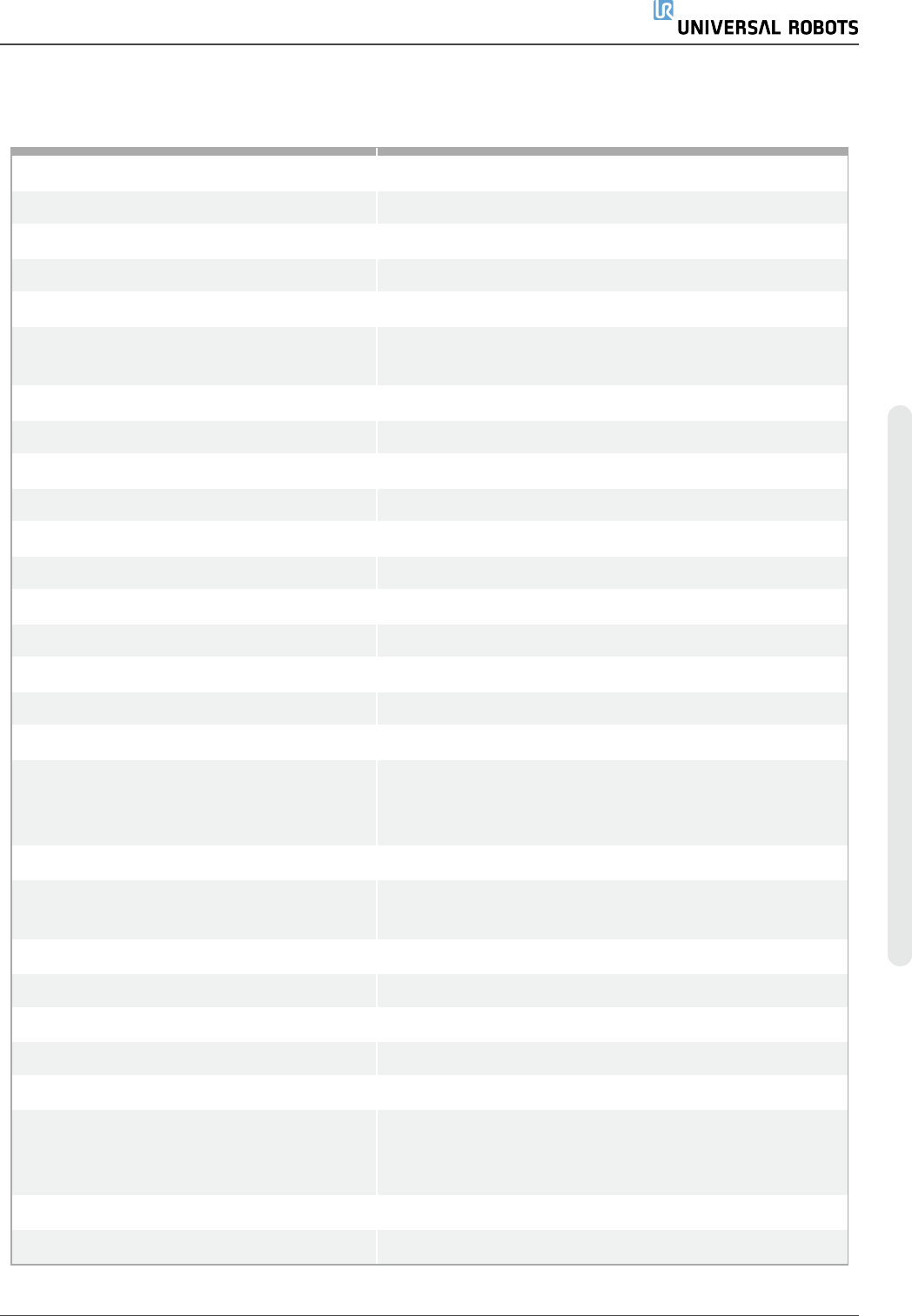
16.技术规格
机器人类型 UR16e
重量 33.1kg / 72.9lb
最大有效载荷 16kg / 35.2lb
延伸 900mm / 35.4in
关节范围 ± 360° for all joints
Speed
机座和肩部关节:最大为 120°/s。所有其他关节:最
大为 180°/s。Tool: Approx. 1
m
/
s
/ Approx. 39.4
in
/
s
.
System Update Frequency 500Hz
力矩传感器精度 5.5N
位姿可重复性 ± 0.05mm / ± 0.0019in( 1.9密耳) ,符合 ISO 9283
足迹 Ø190mm / 7.5in
自由度 6 rotating joints
控制箱尺寸( 宽 × 高 × 厚) 460mm × 449mm × 254mm / 18.2in × 17.6in × 10in
控制箱 I/O 端口 16 digital in, 16 digital out, 2 analog in, 2 analog out
工具 I/O 端口 2 个数字输入,2 个数字输出,2 个模拟输入
工具通信 RS
工具 I/O 电源 12V/24V 2A( 双针) 1A( 单针)
I/O 电源 24V 2A in Control Box
通信
TCP/IP 1000 Mbit: IEEE 802.3ab, 1000BASE-T
Ethernet socket, MODBUS TCP & EtherNet/IP
Adapter, Profinet
编程 PolyScope graphical user interface on 12" touchscreen
噪声
Robot Arm: Less than 65dB(A) Control Box: Less than
50dB(A)
IP 等级 IP54
清洁房间分类 机器人手臂:ISO 5 类,控制箱:ISO 6 类
平均电源最大值 585W
功耗 Approx.350W using a typical program
短路电流额定值 (SCCR) 200A
协同操作
17 advanced safety functions. In compliance with: EN
ISO 13849-1:2008, PLd, Cat.3 and EN ISO 10218-
1:2011, clause 5.10.5
材质 Aluminium, PP plastic
温度
用 户 手 册 75 UR16e
16.技 术规 格
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
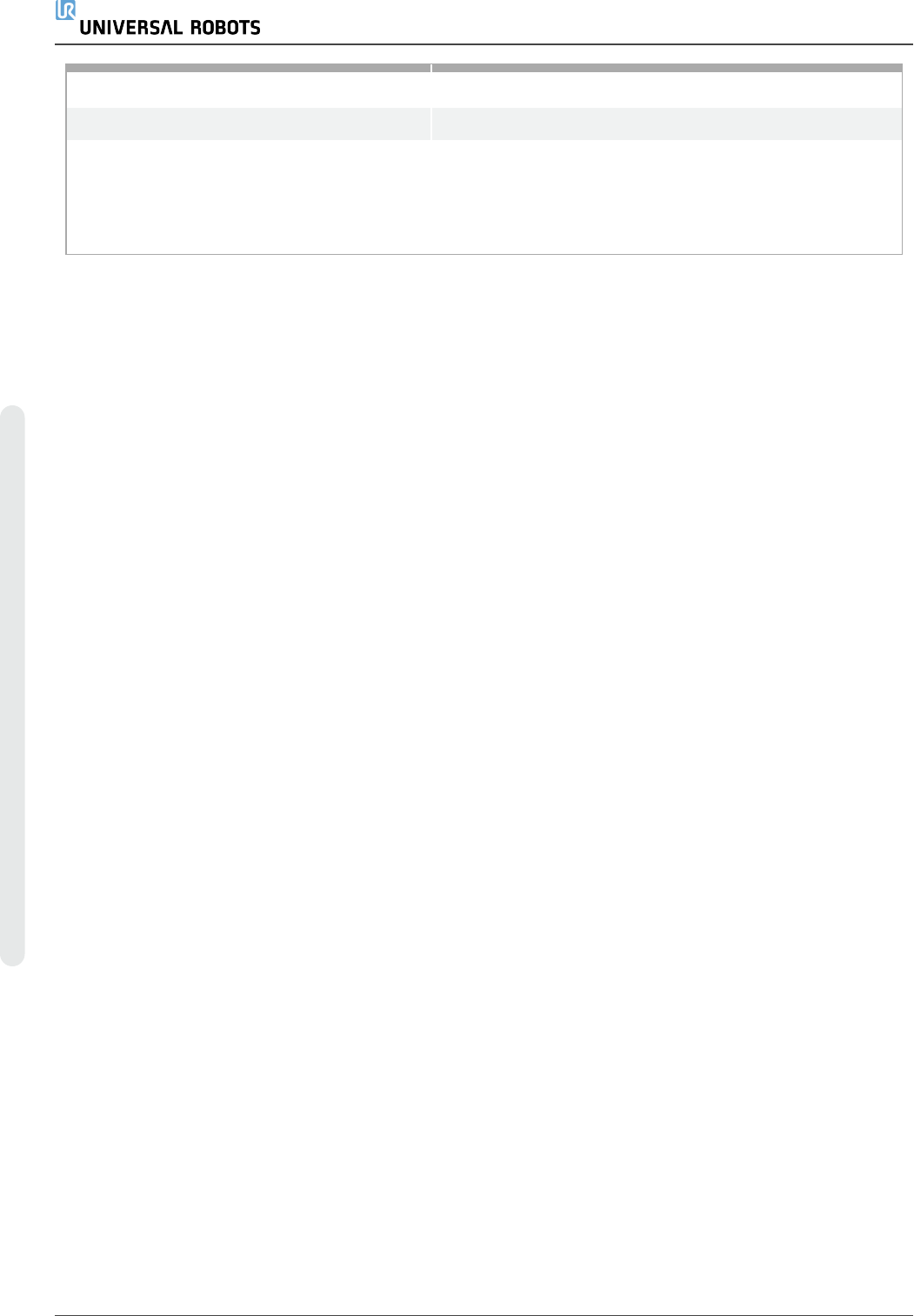
电源 100-240VAC,47-440Hz
TP Cable: Teach Pendant to Control Box 4.5m / 177in
机器人电缆:机器人手臂至控制箱( 选
件)
标准 (PVC) 6 m/236 in x 13.4 mm
标准 (PVC) 12 m/472.4 in x 13.4 mm
HiFlex (PUR) 6 m/236 in x 12.1 mm
HiFlex (PUR) 12 m/472.4 in x 12.1 mm
UR16e 76 用 户 手 册
16.技 术规 格
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。