99469_UR16e_User_Manual_zh_Global.pdf - 第224页
1. 在 “ 安 装 设 置 ” 中 , 点 按 特 征 。 2. 在 “ 特 征 ” 下 , 选 择 点 , 向 您 的 程 序 树 中 添 加 一 个 点 。 3. 点 按 编 辑 , 进 入 “ 编 辑 ” 屏 幕 , 更 改 点 的 位 置 和 旋 转 编 辑 直 线 直 线 在 程 序 树 中 显 示 为 两 个 点 。 您 必 须 定 义 每 个 点 。 1. 在 “ 安 装 设 置 ” 中 , 点 按 特 征 。 2. 在…
25.17.8. 特征编辑
“特征编辑”是向安装设置中添加特征和/或编辑现有特征的另一种方法。
使用“编辑”可以在不移动机器人手臂的情况下放置和移动特征,因此可将特征放置在机器人
手臂无法触及的位置。
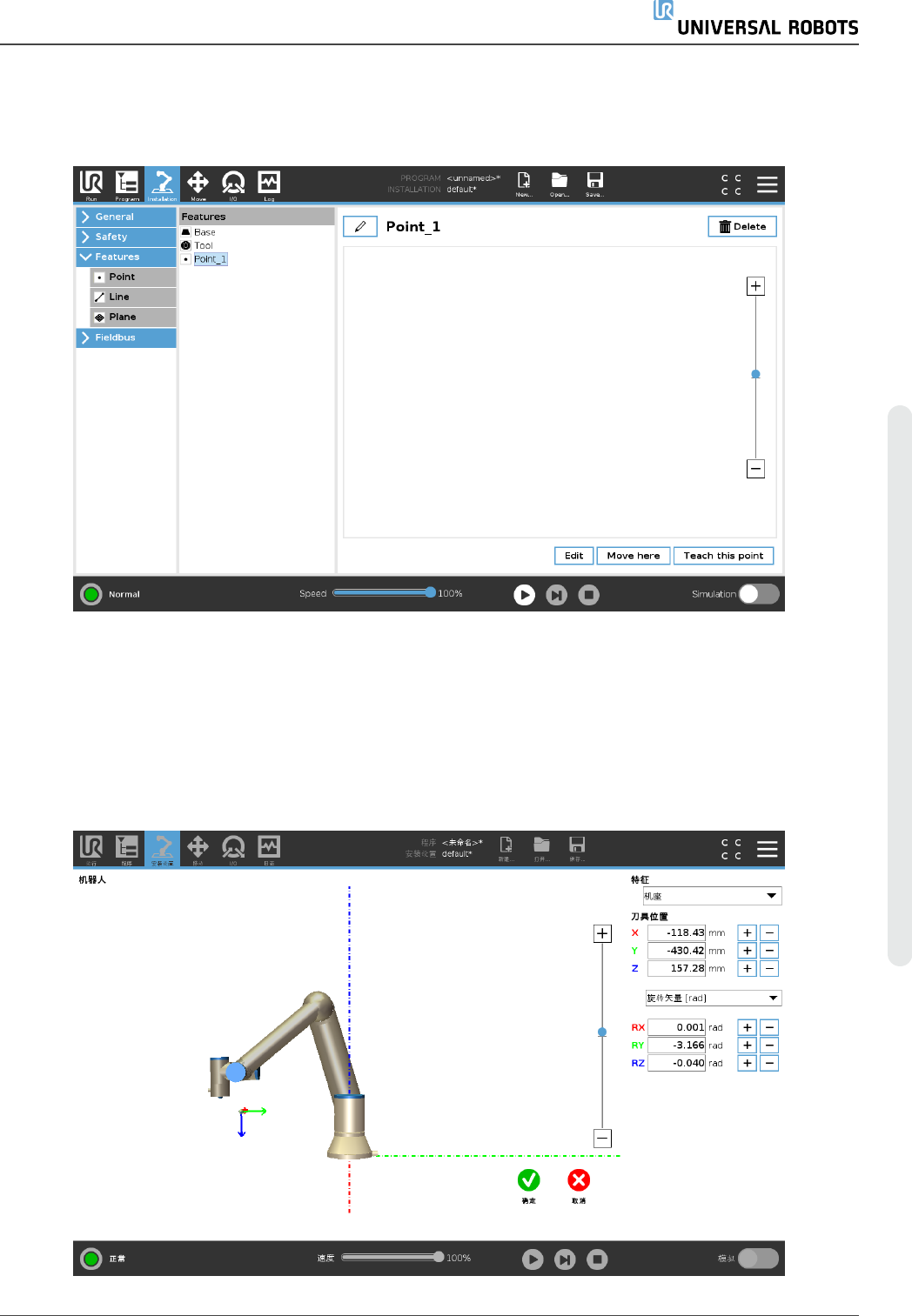
编 辑 点
可以编辑定义的点或未定义的点。编辑未定义的点即可对其进行定义。
用 户 手 册 209 UR16e
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
1. 在“安装设置”中,点按特征。
2. 在“特征”下,选择点,向您的程序树中添加一个点。
3. 点按编辑,进入“编辑”屏幕,更改点的位置和旋转
编 辑 直 线
直线在程序树中显示为两个点。您必须定义每个点。
1. 在“安装设置”中,点按特征。
2. 在“特征”下,选择直线,向您的程序树中添加一条直线。
3. 直线由两个点组成:
• 点按一个点编辑该点的坐标,然后再点按直线的另一个点编辑另一个点的坐标。
编 辑 平 面
1. 在“安装设置”中,点按特征。
2. 在“特征”下,选择平面,向您的程序树中添加一个平面。
3. 点按编辑,进入“编辑”屏幕,更改平面的位置和旋转
25.18. 现场总线
在这里,您可以设置用于 PolyScope 所接受的实时分布式控制的工业计算机网络协议
族:MODBUS、以太网/IP 和 PROFINET。
UR16e 210 用 户 手 册
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
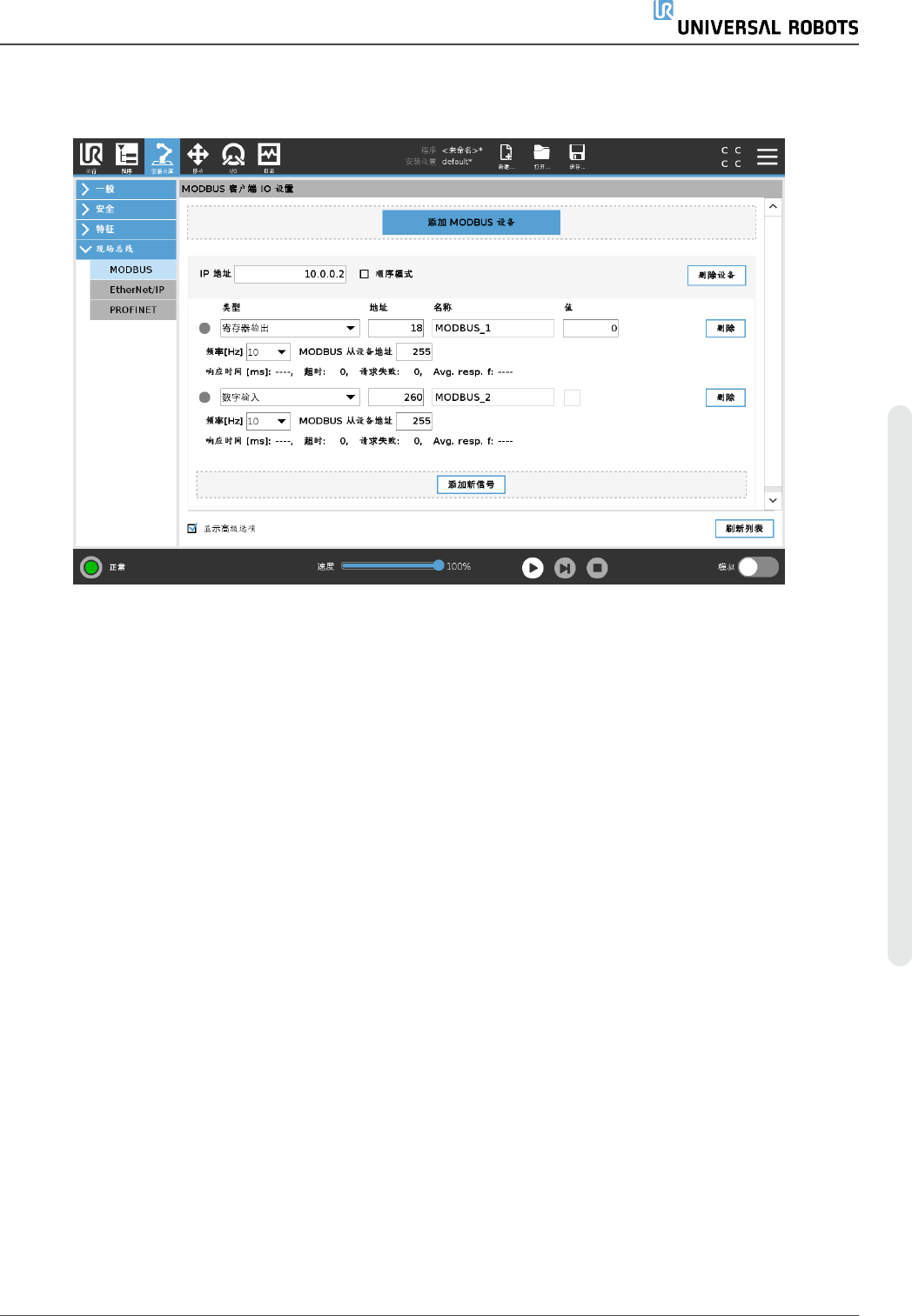
25.19. MODBUS 客户端 I/O 设置
此处可设置 MODBUS 客户端( 主) 信号。可由输入/输出信号( 寄存器或数字) 创建与指定 IP 地
址的 MODBUS 服务器( 或从设备) 的连接。每个信号都有唯一的名称,因此可用在程序中。
25.19.1. 刷新
按此按钮可刷新所有 MODBUS 连接。刷新会断开所有的 modbus 设备,并重新连接。所有统计
信息都被清除。
25.19.2. 添加设备
按此按钮可添加新的 MODBUS 设备。
25.19.3. 删除设备
按此按钮可删除 MODBUS 设备和已添加到设备的所有信号。
25.19.4. 设置设备 IP
此处将显示 Modbus 设备的 IP 地址。按此按钮可更改 IP 地址。
25.19.5. 顺序模式
仅在选择“显示高级选项”( 请参阅25.19.13. 显示高级选项 在本页213) 时可用。
选择此复选框
将强制 modbus 客户端在发送下一个请求之前等待响应。某些现场总线单元需要此模式。当有
多个信号时,打开此选项可能有帮助,而增加请求频率会导致信号断开。
用 户 手 册 211 UR16e
25.安 装设 置选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。