99469_UR16e_User_Manual_zh_Global.pdf - 第97页
Safety Func ti o n D e s c ri pti on PF Hd Affec ts R e duc ed Mo de S F s etti ngs c hang e R e duc ed Mode can be ini ti ate d by a safe ty pl ane / bound ary ( s tarts w h en at 2cm of the pla ne and r e duc ed mode s…
SF# and
Safety
Function
Description What happens?
Tole-
rance
PFHd Affects
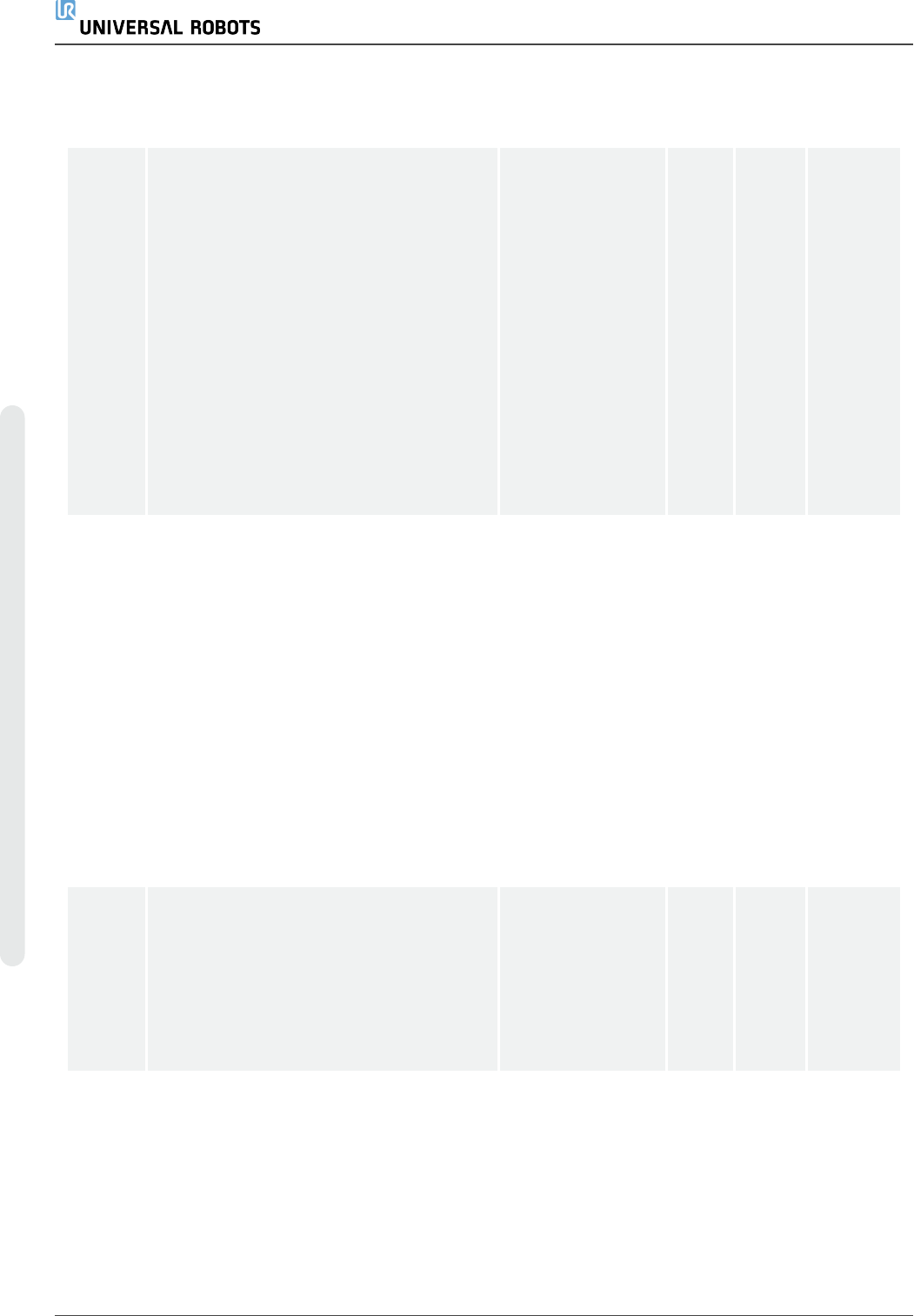
SF15
Stopping
Time
Limit
Real time monitoring of conditions such
that the stopping time limit will not be
exceeded. Robot speed is limited to
ensure that the stop time limit is not
exceeded. The control SW continuously
calculates the stopping capability of the
robot in the given motion. If the time
needed to stop the robot is at risk of
exceeding the time limit, the speed of
motion is reduced to ensure the limit is not
exceeded. The safety function performs
the same calculation of the stopping time
and initiates a cat 0 stop if they are
exceeded.
Will not allow the
actual stopping time
to exceed the limit
setting. Causes
decrease in speed
or a protective stop
so as NOT to
exceed the limit
50 ms
1.20E-
07
Robot
SF16
Stopping
Distance
Limit
Real time monitoring of conditions such
that the stopping distance limit will not be
exceeded. Robot speed is limited to
ensure that the stop distance limit will not
be exceeded. The control SW
continuously calculates the stopping
capability of the robot in the given motion.
If the distance needed to stop the robot is
at risk of exceeding the distance limit, the
speed of motion is reduced to ensure the
limit is not exceeded. The safety function
performs the same calculation of the
stopping distance and initiates a cat 0 stop
if they are exceeded.
Will not allow the
actual stopping time
to exceed the limit
setting. Causes
decrease in speed
or a protective stop
so as NOT to
exceed the limit
40 mm
1.20E-
07
Robot
SF17
Safe
Home
Position
Safety function which monitors a safety
rated output, such that it ensures that the
output can only be activated when the
robot is in the configured “safe home
position”. A cat 0 stop is initiated if the
output is activated when the robot is not in
the configured position.
The “safe home
output” can only be
activated when the
robot is in the
configured “safe
home position”
1.7 °
1.20E-
07
External
connection
to logic
and/or
equipment
UR16e 82 用 户 手 册
17.安 全功 能表
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
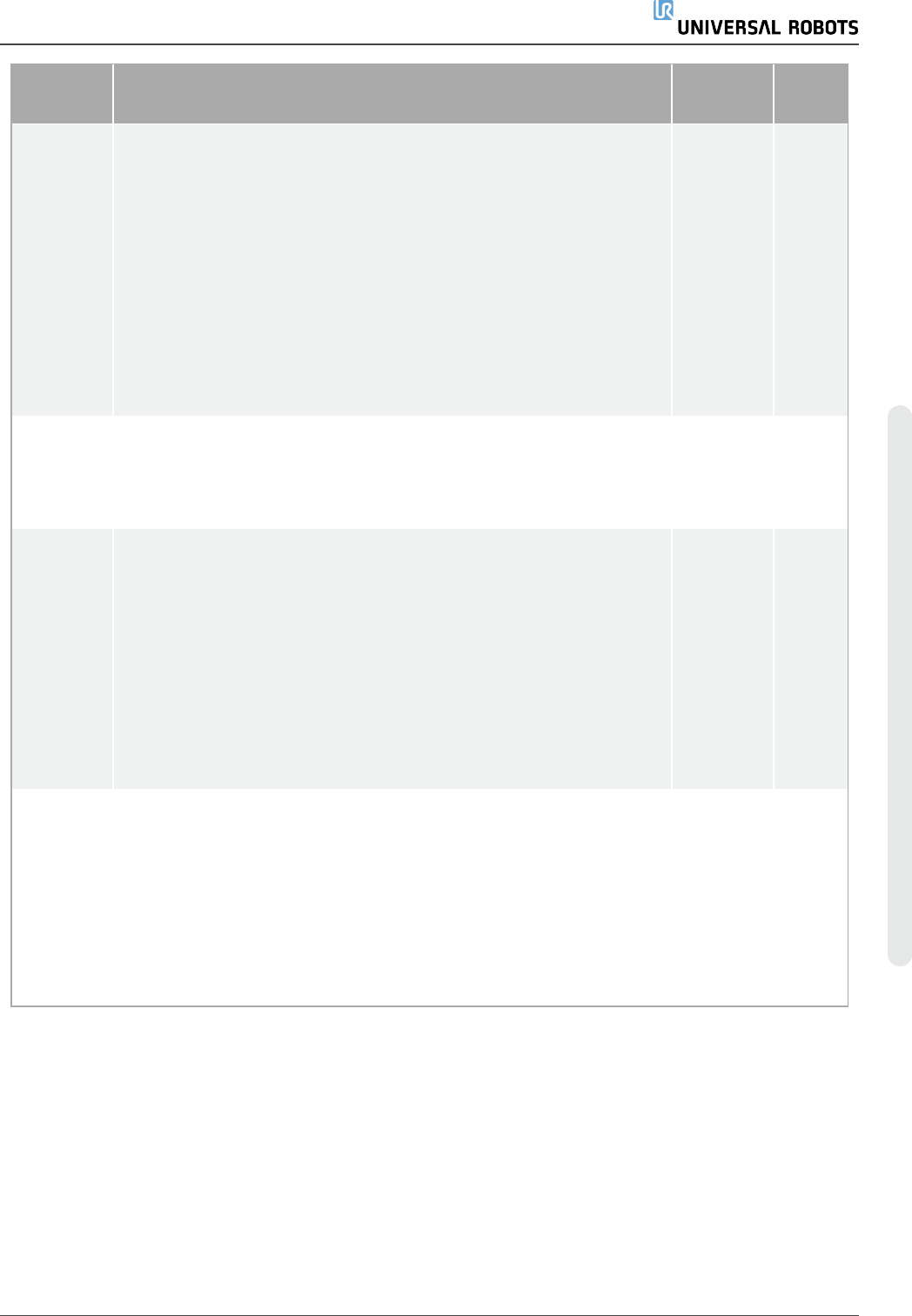
Safety
Function
Description PFHd Affects
Reduced
Mode SF
settings
change
Reduced Mode can be initiated by a safety plane/ boundary (starts
when at 2cm of the plane and reduced mode settings are achieved
within 2cm of the plane) or by use of an input to initiate (will achieve
reduced settings within 500ms).
When the external connections are Low, Reduced Mode is
initiated. Reduced Mode means that ALL reduced mode limits are
ACTIVE.
Reduced mode is not a safety function, rather it is a state affecting
the settings of the following safety function limits: joint position, joint
speed, TCP pose limit, TCP speed, TCP force, momentum,
power, stopping time, and stopping distance.
PFHd is
either
1.20E-07
or 1.50E-
07
depending
on the
safety
function
Robot
Safeguard
Reset
When configured for Safeguard Reset and the external
connections transition from low to high, the safeguard stop
RESETS. Safety input to initiate a reset of safeguard stop safety
function.
Input to
SF2 (See
SF2)
Robot
3 Position
Enabling
Device
INPUT
When the external Enabling Device connections are Low, a
Safeguard Stop (SF2) is initiated. Recommendation: Use with a
mode switch as a safety input. If a mode switch is not used and
connected to the safety inputs, then the robot mode will be
determined by the User Interface. If the User Interface is in
• “run mode”, the enabling device will not be active.
• “programming mode”, the enabling device will be active. It is
possible to use password protection for changing the mode
by the User Interface.
Input to
SF2 (See
SF2
safeguard
stop)
Robot
Mode
switch
INPUT
When the external connections are Low, Operation Mode (running/
automatic operation in automatic mode) is in effect. When High,
mode is programming/ teach. Recommendation: Use with a 3-
position enabling device. When in teach/program, initially the TCP
speed will be limited to 250mm/s. The speed can manually be
increased by using the pendant user interface “speed-slider”, but
upon activation of the enabling device, the speed limitation will
reset to 250mm/s.
Input to
SF2 (See
SF2
safeguard
stop)
Robot
17.2. Table 2
UR e-Series robots comply with ISO 10218-1:2011 and the applicable portions of ISO/TS 15066. It is
important to note that most of ISO/TS 15066 is directed towards the integrator and not the robot
manufacturer. ISO 10218-1:2011, clause 5.10 collaborative operation details 4 collaborative operation
techniques as explained below. It is very important to understand that collaborative operation is of the
APPLICATION when in AUTOMATIC mode.
用 户 手 册 83 UR16e
17.安 全功 能表
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
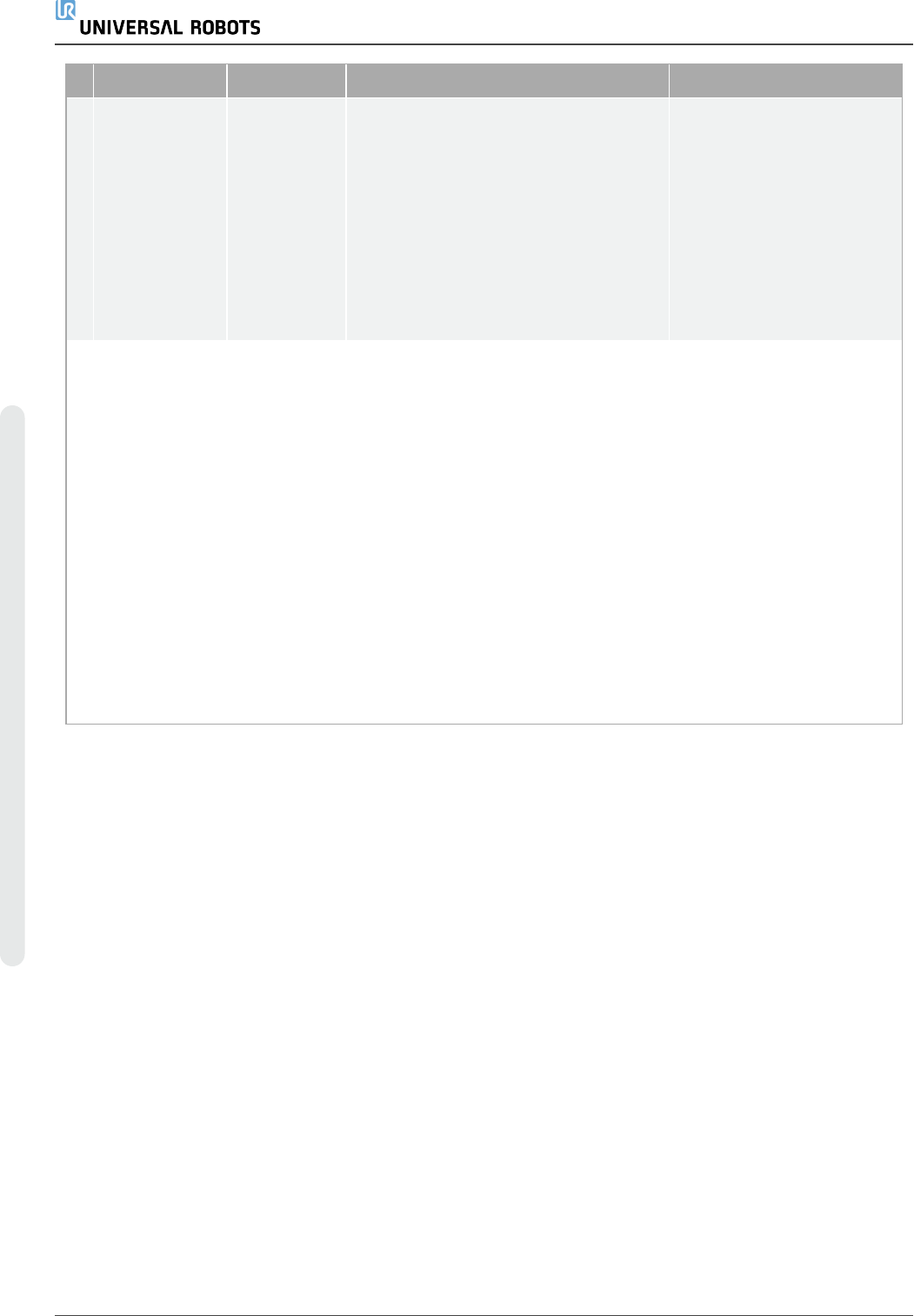
# ISO 10218-1 Technique Explanation UR e-Series
1
Collaborative
Operation
2011 edition,
clause 5.10.2
Safety-rated
monitored
stop
Stop condition where position is held
at a standstill and is monitored as a
safety function. Category 2 stop is
permitted to auto reset. In the case of
resetting and restarting operation
after a safety -rated monitored stop,
see ISO 10218-2 and ISO/TS 15066
as resumption shall not cause
hazardous conditions.
UR robots’ safeguard stop
is a safety-rated monitored
stop, See SF2 on page 1.
It is likely, in the future, that
“safety-rated monitored
stop” will not be called a
form of collaborative
operation.
2
Collaborative
Operation
2011 edition,
clause 5.10.3
Hand-
guiding
This is essentially individual and direct
personal control while the robot is in
automatic mode.
Hand guiding equipment shall be
located close to the end-effector and
shall have:
• an Emergency Stop
pushbutton
• a 3-position enabling device
• a safety-rated monitored stop
function
• a settable safety-rated
monitored speed function
UR robots do not provide
hand-guiding for
collaborative operation.
Hand-guided teach (free
drive) is provided with UR
robots but this is for
programming in manual
mode and not for
collaborative operation in
automatic mode.
UR16e 84 用 户 手 册
17.安 全功 能表
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。