99469_UR16e_User_Manual_zh_Global.pdf - 第192页
• 工 具 路 径 文 件 • 远 程 TC P • 远 程 TC P PC S 使 用 C A D/ C A M 软 件 配 置 工 具 路 径 工 具 路 径 定 义 了 工 具 的 方 向 、 轨 迹 、 速 度 或 ( 进 给 速 度 ) 和 行 进 方 向 。 1. 创 建 或 导 入 零 件 的 C AD 模 型 。 2. 设 置 固 定 到 零 件 的 零 件 坐 标 系 ( PC S) 。 3. 根 据 零 件 特 征 …
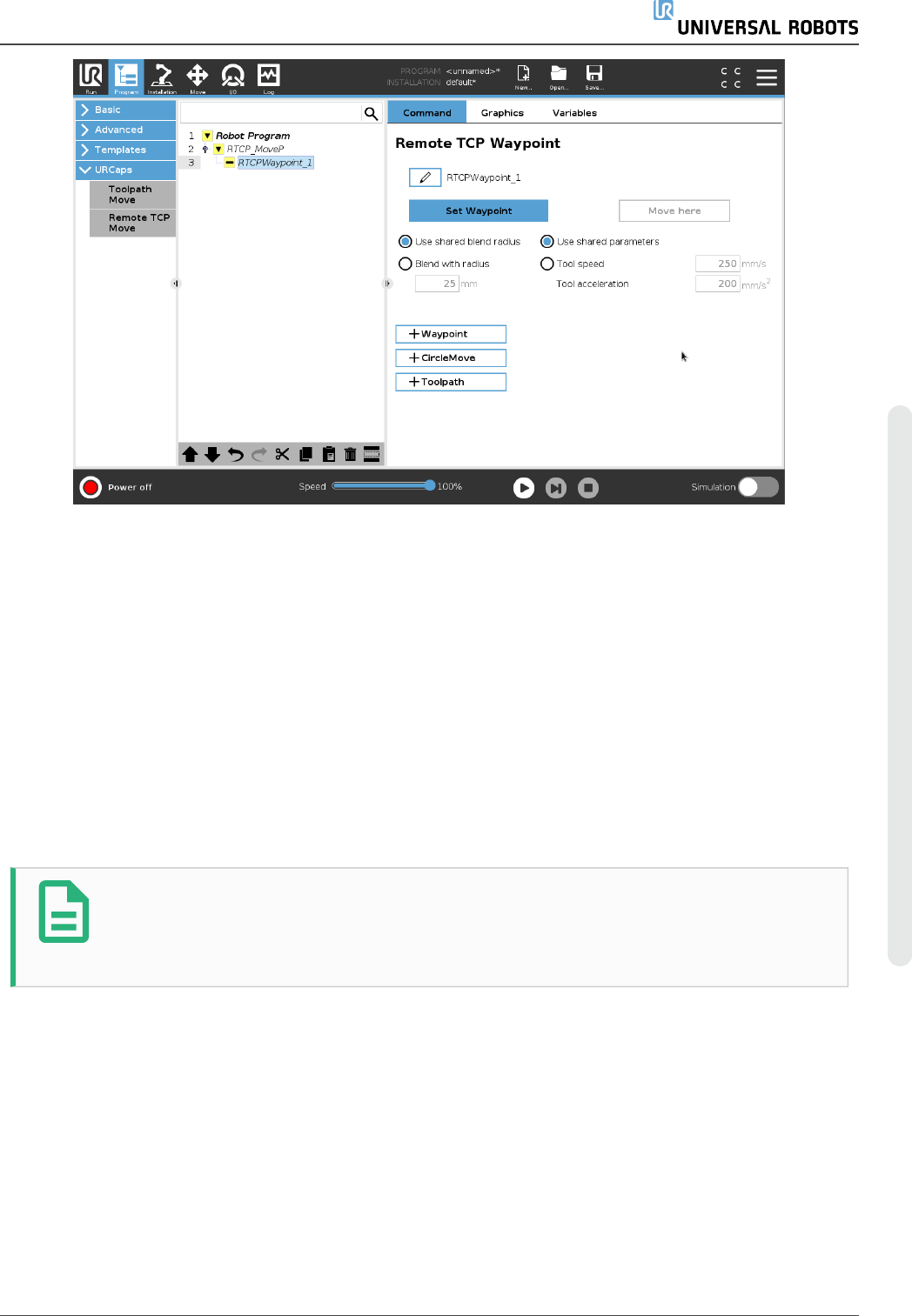
示 教 RTCP路 点
1. 在“程序”选项卡中,插入一个 RTCP_MoveP 节点。
2. 在 RTCP_MoveP 节点上,点按设置打开“移动”屏幕。
3. 在“移动”屏幕上,使用示教模式或缓慢移动将机器人定位于所需的配置。
4. 点击绿色复选标记进行验证。
配 置 RTCP路 点
使用交融使机器人能够在两个轨迹之间平顺过渡。点按使用共享交融半径或点按与半径交
融,为来自 RTCP_MoveP 的路点设置交融半径。
提示
物理时间节点( 如移动、等待) 节点不能用作 RTCP_MoveP 节点的子节点。如果
将不支持的节点作为子节点添加到 RTCP_MoveP 节点,程序无法通过验证。
24.13.4. 远程 TCP 工具路径
远程 TCP 和工具路径 URCap 会自动生成机器人运动,从而更容易准确地跟踪复杂的轨迹。
配 置 远 程 TCP 工 具 路 径
1. 在“远程 TCP 和工具路径 URCap”主页上选择远程 TCP 工具路径移动以进入工作流。
2. 按照说明选项卡下的说明进行操作。
远程 TCP 工具路径移动需要以下主要控件:
用 户 手 册 177 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
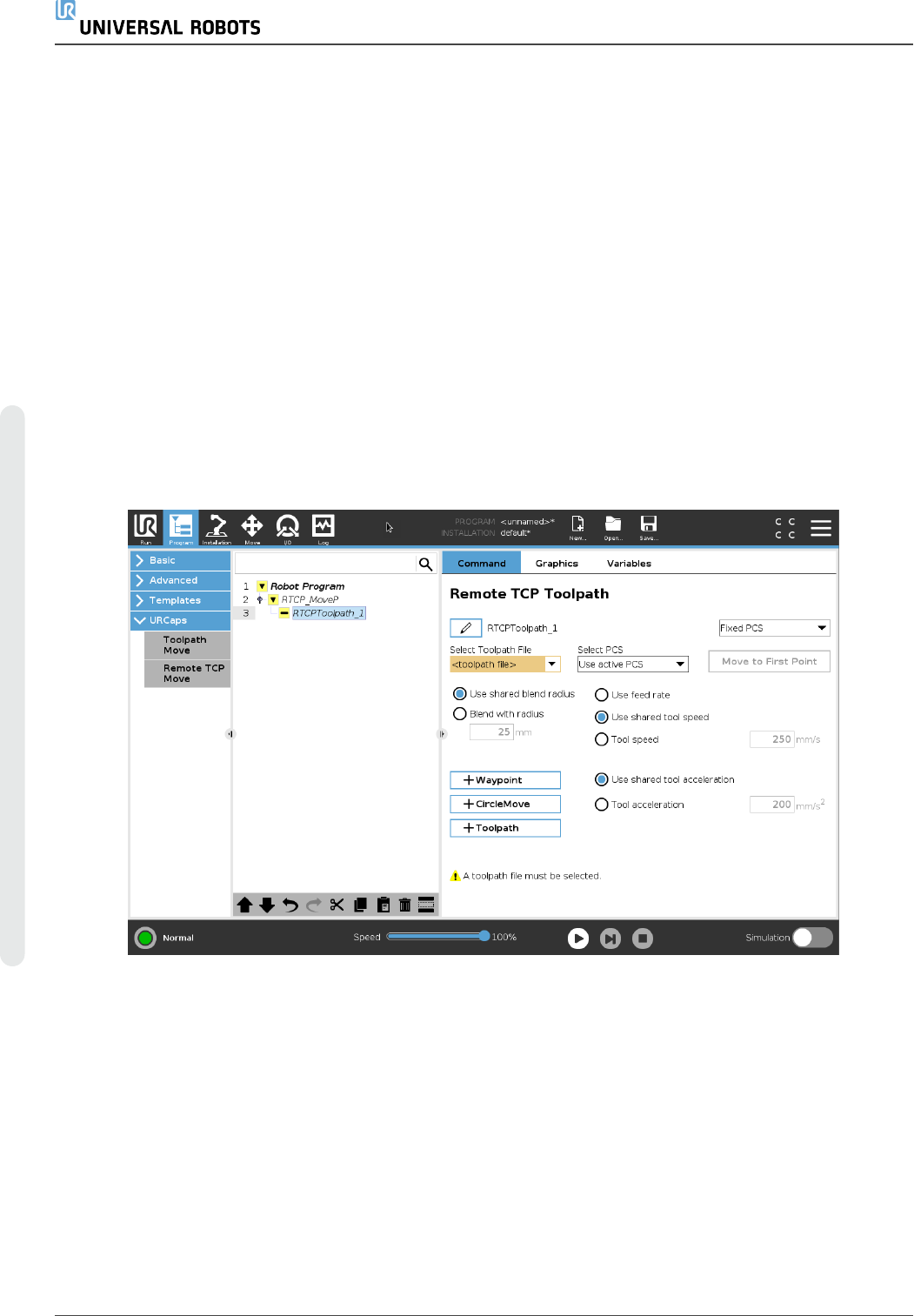
• 工具路径文件
• 远程 TCP
• 远程 TCP PCS
使 用 CAD/CAM 软 件 配 置 工 具 路 径
工具路径定义了工具的方向、轨迹、速度或( 进给速度) 和行进方向。
1. 创建或导入零件的 CAD 模型。
2. 设置固定到零件的零件坐标系( PCS) 。
3. 根据零件特征创建相对于PCS的工具路径
4. 模拟工具路径运动轨迹以验证其是否符合预期。
5. 将工具路径导出为扩展名为.nc的G代码文件。
将 G代 码 工 具 路 径 导 入 PolyScope
1. 将工具路径文件加载到USB记忆棒的根目录中。工具路径文件必须是.nc扩展名
2. 将USB记忆棒插入示教盒。
3. 在页眉中,点按“安装设置”,再点按“URCaps”,然后依次选择“远程 TCP 和工具路径”、
“远程 TCP - 工具路径移动”和“工具路径”。
4. 选择要导入到Polyscope的工具路径文件。
UR16e 178 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
24.13.5. 远程 TCP
为 工 具 路 径 移 动 配 置 远 程 TCP
1. 在CAM环境中的第一个路点,确定工具方向。
2. 使用自由驱动和夹爪手动抓紧零件。
3. 选择远程 TCP 的位置
4. 使用位置向导获取正值。
5. 调整机器人,直到达到接近远程 TCP 的所需零件位姿为止。
6. 在物理零件的第一个路点上预设工具的方向。Z轴正方向应指向零件表面。
7. 以与上一步预设的相同的方向创建一个平面特征。
8. 通过复制“平面特征”中的值来设置远程TCP方向。执行工具路径时,可以保持所需的零
件位姿。
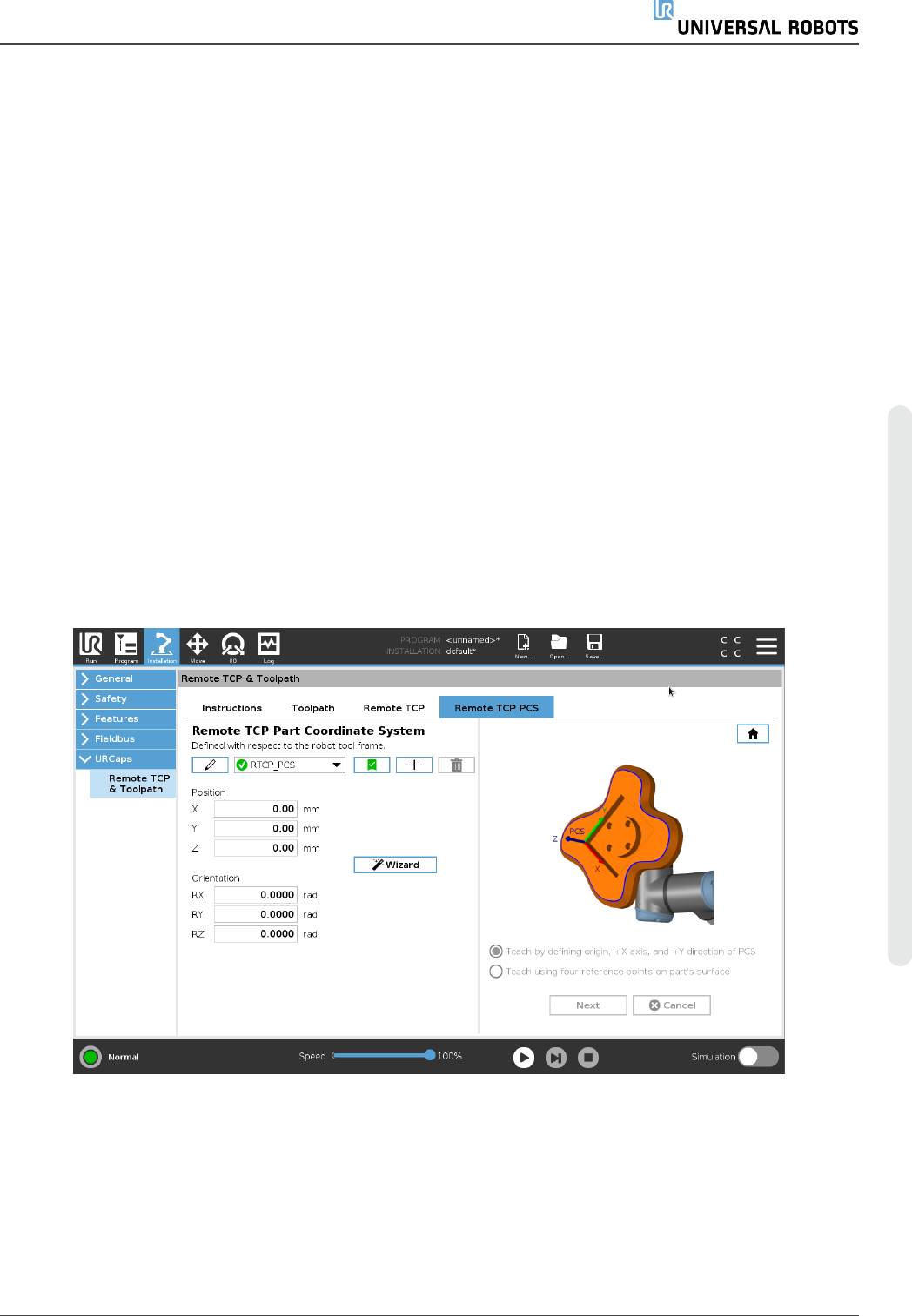
24.13.6. 远程 TCP PCS
远程TCP零件坐标系( PCS) 定义为相对于机器人工具法蘭固定。在PolyScope屏幕上点击魔
棒,以激活向导来示教远程TCP PCS。您可以使用以下任一种示教方法。
配 置 远 程 TCP PCS
如果可以在零件表面上设置 PCS,请使用此方法。
用 户 手 册 179 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。