99469_UR16e_User_Manual_zh_Global.pdf - 第37页
5. 机 械 接 口 5.1. 前 言 本 章 将 介 绍 安 装 机 器 人 系 统 的 部 件 时 应 注 意 的 基 本 事 项 。 务 必 遵 守 一 章 中 的 电 气 安 装 说 明 。 5.2. 机 器 人 工 作 空 间 机 器 人 的 工 作 空 间 是 指 机 座 关 节 周 围 900 mm 范 围 内 的 区 域 。 选 择 机 器 人 安 装 位 置 时 , 务 必 考 虑 机 器 人 正 上 方 和 正 下…
UR16e 22 用 户 手 册
4.运 输
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
5.机械接口
5.1. 前言
本章将介绍安装机器人系统的部件时应注意的基本事项。务必遵守一章中的电气安装说明。
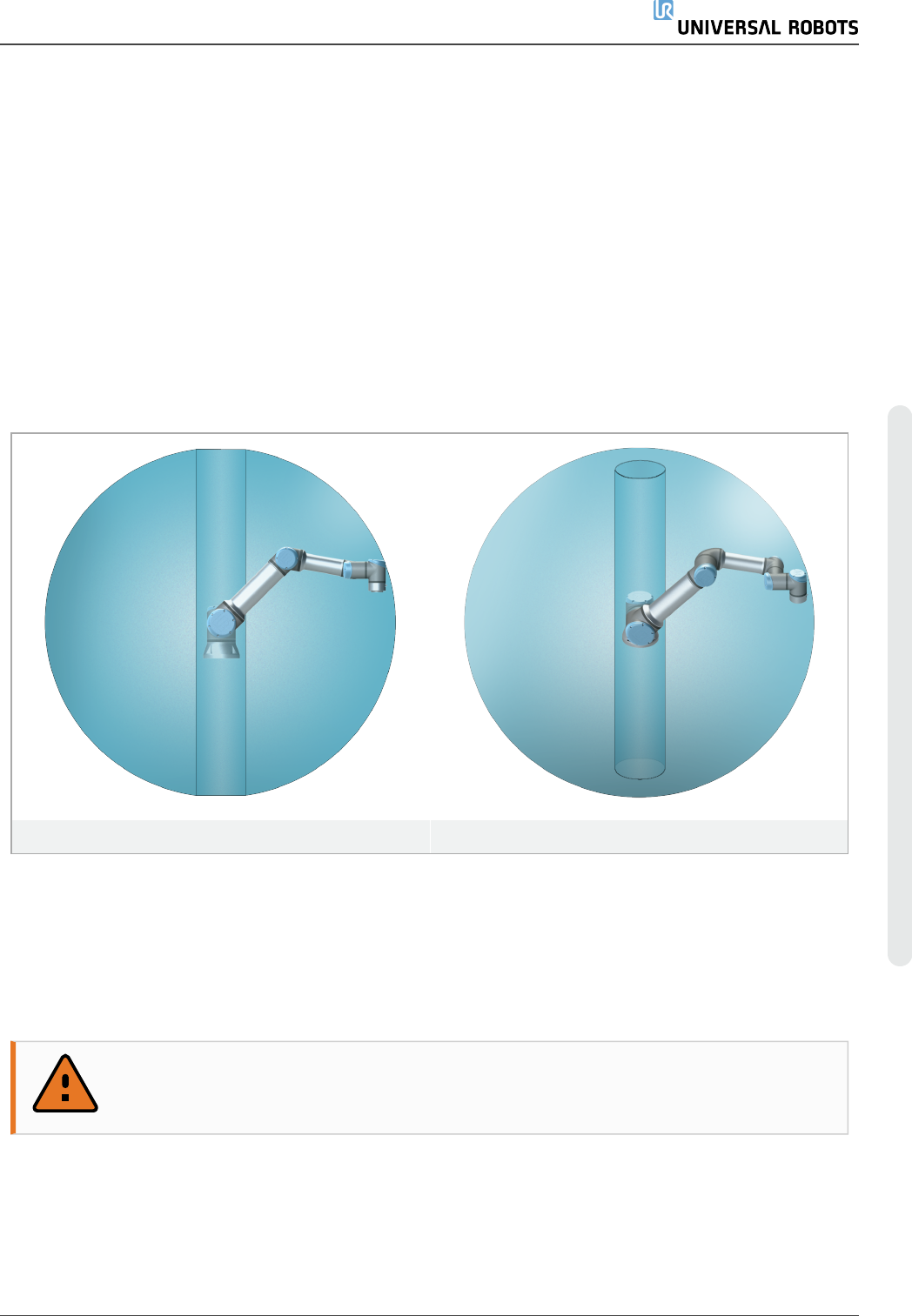
5.2. 机器人工作空间
机器人的工作空间是指机座关节周围 900 mm 范围内的区域。选择机器人安装位置时,务必考
虑机器人正上方和正下方的圆柱体空间。应避免将工具移向圆柱体空间,因为这样会造成工
具慢速运动时关节却运动过快,从而导致机器人工作效率低下,风险评估难以进行。
正面 倾斜
5.3. 安装
机 器 人 手 臂
使用四颗 8.8 级强度的 M8 螺栓和机座上的四个 8.5mm 安装孔来安装机器人手臂。
警告
确保机器手臂正确并安全地安装到位。安装不稳定会导致事故。
固 定 机 器 人 手 臂
图 6.1 显示了钻孔位置和螺丝安装位置。也可采购精确的基座作为附件来使用。
用 户 手 册 23 UR16e
5.机 械接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
1. 将机器人安装在一个坚固、无震动的表面,该表面应当足以承受至少 10 倍的机座关节
完全扭转力,以及至少 5 倍的机器人手臂的重量。
如果机器人安装在线性轴上或是活动的平台上,则活动性安装基座的加速度非常低。高
加速度会导致机器人发生安全停机。
2. 将螺栓紧固至 10Nm扭矩。
3. 使用预留的两个 Ø8 孔和一个销钉来准确调整机器人手臂的位置。
警告
关闭机器人手臂的电源,防止在安装和拆卸过程中意外启动。
关闭机器人手臂的电源:
1. 按下示教盒上的电源按钮关闭机器人。
2. 从墙壁插座上拔下电源线。
3. 等待 30 秒,让机器人释放所有储存的能量。
小心
将机器人安装在适合 IP 等级的环境中。机器人不得在超过与机器人 (Ip54)、示
教盒 (IP54) 和控制箱 (IP44) 的 IP 等级相当的环境中运行。
UR16e 24 用 户 手 册
5.机 械接 口
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。