99469_UR16e_User_Manual_zh_Global.pdf - 第171页
• 行 允 许 您 使 用 表 达 式 编 辑 器 ( 24.3 . 表 达 式 编 辑 器 在 本 页 131 ) 编 写 单 行 U Rsc ript 代 码 • 文 件 允 许 您 编 写 、 编 辑 或 加 载 U Rsc ript 文 件 。 您 可 以 在 支 持 网 站 ( http ://w ww .u ni ve rsal -robo ts.c om/s upp ort ) 上 的 脚 本 手 册 中 找 到 编 写 …
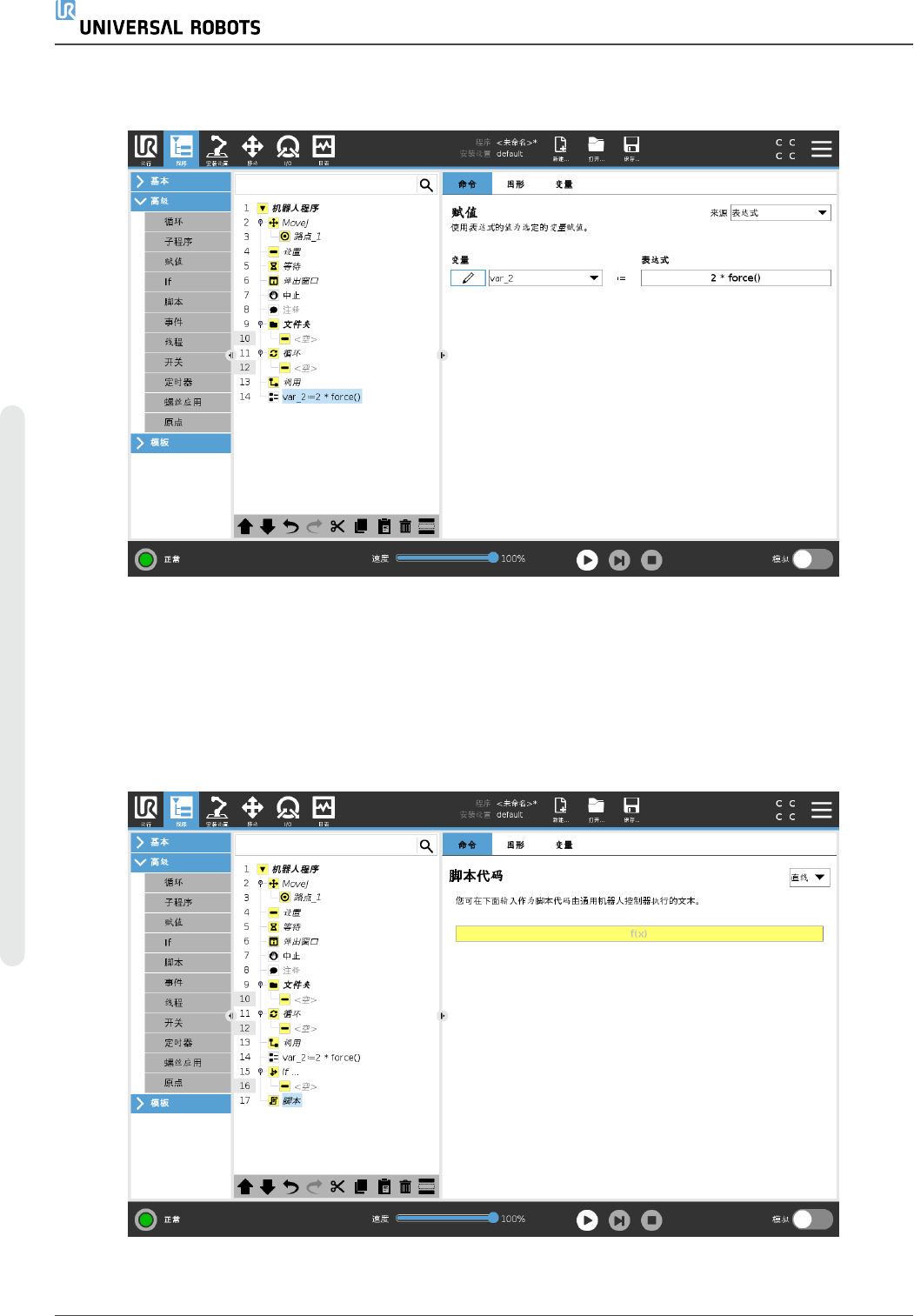
• 行允许您使用表达式编辑器( 24.3. 表达式编辑器 在本页131) 编写单行 URscript 代码
• 文件允许您编写、编辑或加载 URscript 文件。
您可以在支持网站 (http://www.universal-robots.com/support) 上的脚本手册中找到编写 URscript
的说明。
URscript 文件中注明的功能和变量可在整个程序中通过 PolyScope 使用。
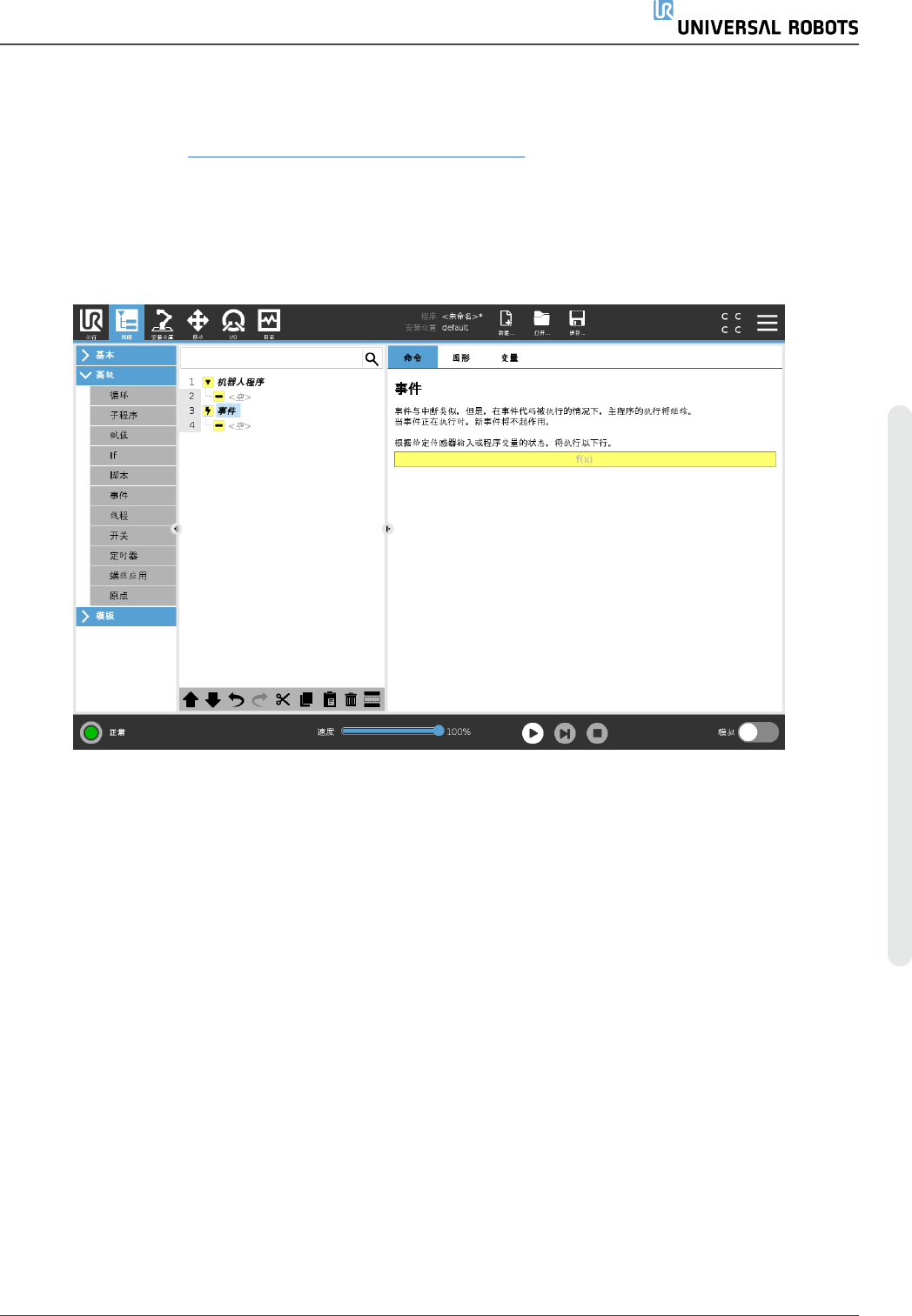
24.11.6. 事件
“事件”命令可用于监控输入信号,以及在输入信号呈高电平时执行某个动作或设置变量。例
如,当输出信号呈高电平时,事件程序可等待 200ms,然后将其重新设置为低电平。这样,如
果外部机器上的触发机制是上升沿而非高输入电平时,主程序代码要简单得多。每个控制周
期 (2ms) 对事件进行一次检查。
用 户 手 册 157 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
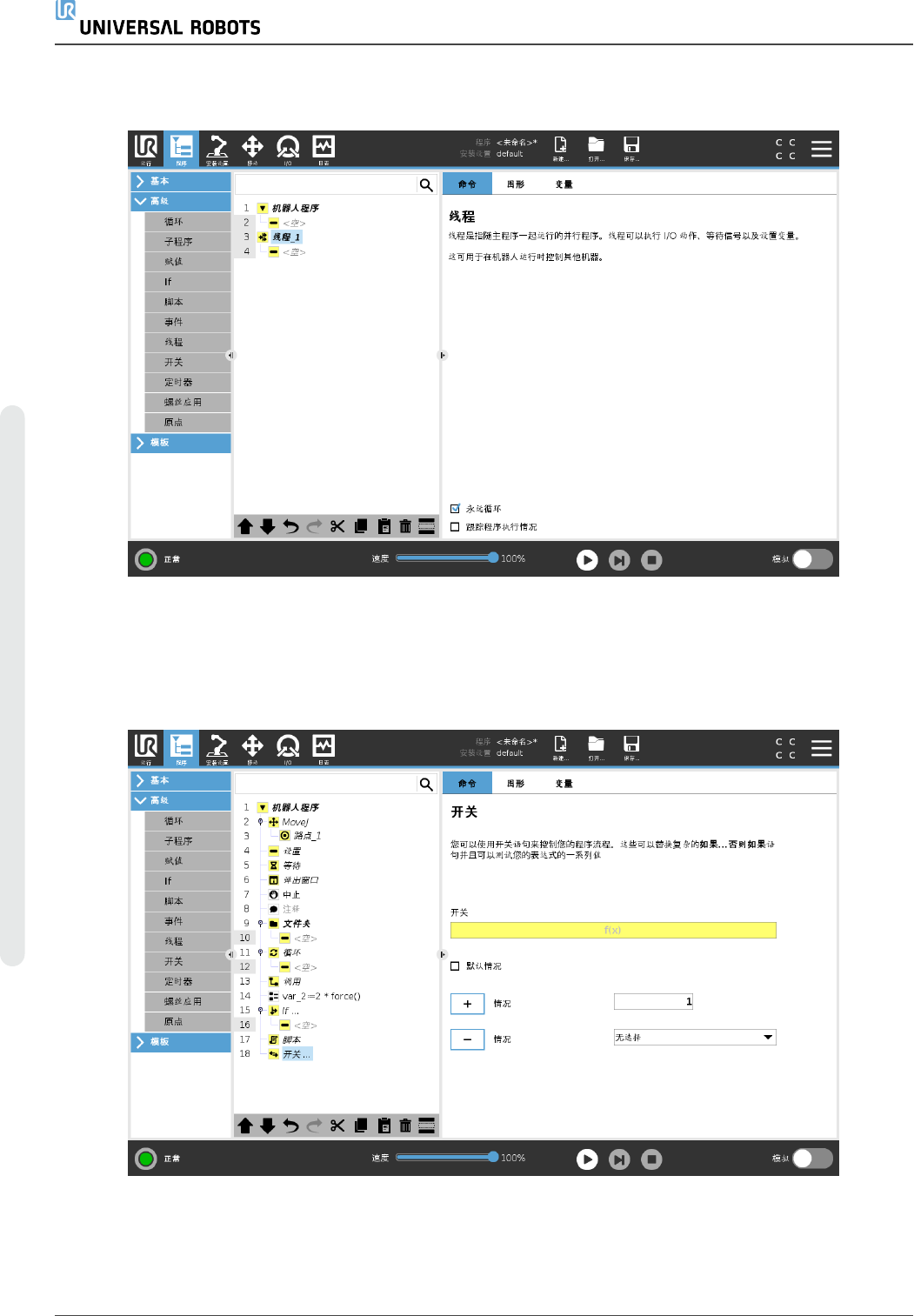
24.11.7. 线程
线程是机器人程序的一个并行进程。线程可用于控制与机器人手臂无关的外部机器。线程可
以通过变量和输出信号和机器人程序进行通信。
24.11.8. 开关
UR16e 158 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。