99469_UR16e_User_Manual_zh_Global.pdf - 第176页
直 线 要 示 教 位 置 , 请 在 程 序 树 中 选 择 每 个 物 品 : • StartItem 1 • EndIte m1 使 用 屏 幕 底 部 的 物 品 数 文 本 框 在 序 列 中 插 入 一 定 数 量 的 物 品 。 网 格 要 示 教 位 置 , 请 在 程 序 树 中 选 择 每 个 物 品 : • C o rnerItem 1 • C o rnerItem 2 • C o rnerItem 3 • C o…
创 建 码 垛 程 序
1. 决定您是要示教特征( 请参阅25.17. 特征 在本页202) 还是要将机座用作参考平面。
2. 在程序选项卡的模板下,点按码垛。
3. 在码垛屏幕上,根据所需操作选择以下操作之一。
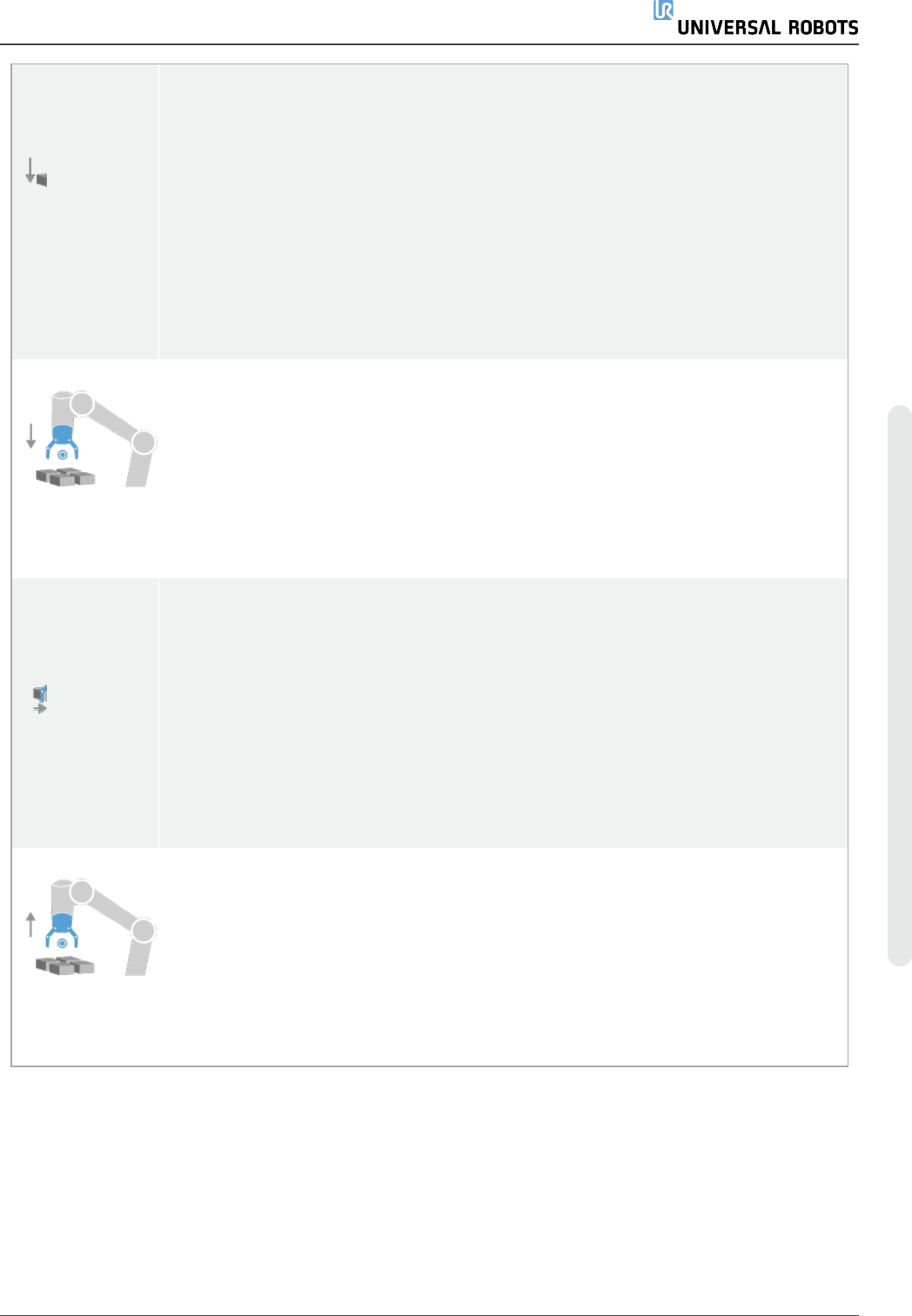
1. 选择码垛可将物品移到托盘上。
2. 选择卸垛可从托盘中移除物品。
4. 在码垛属性下,为您的程序指定名称、特征( 见步骤 1) 、物品高度和物品计数器名称。如
果希望机器人在停止处理的物品处重新启动,请选择记住上一个物品位置框。
5. 在“码垛”屏幕上的动作下,通过选择以下项添加要在码垛序列之前或之后执行的其他动
作:
1. 添加码垛前的动作:这些动作在开始码垛之前执行。
2. 添加码垛后的动作:这些动作在完成码垛后执行。
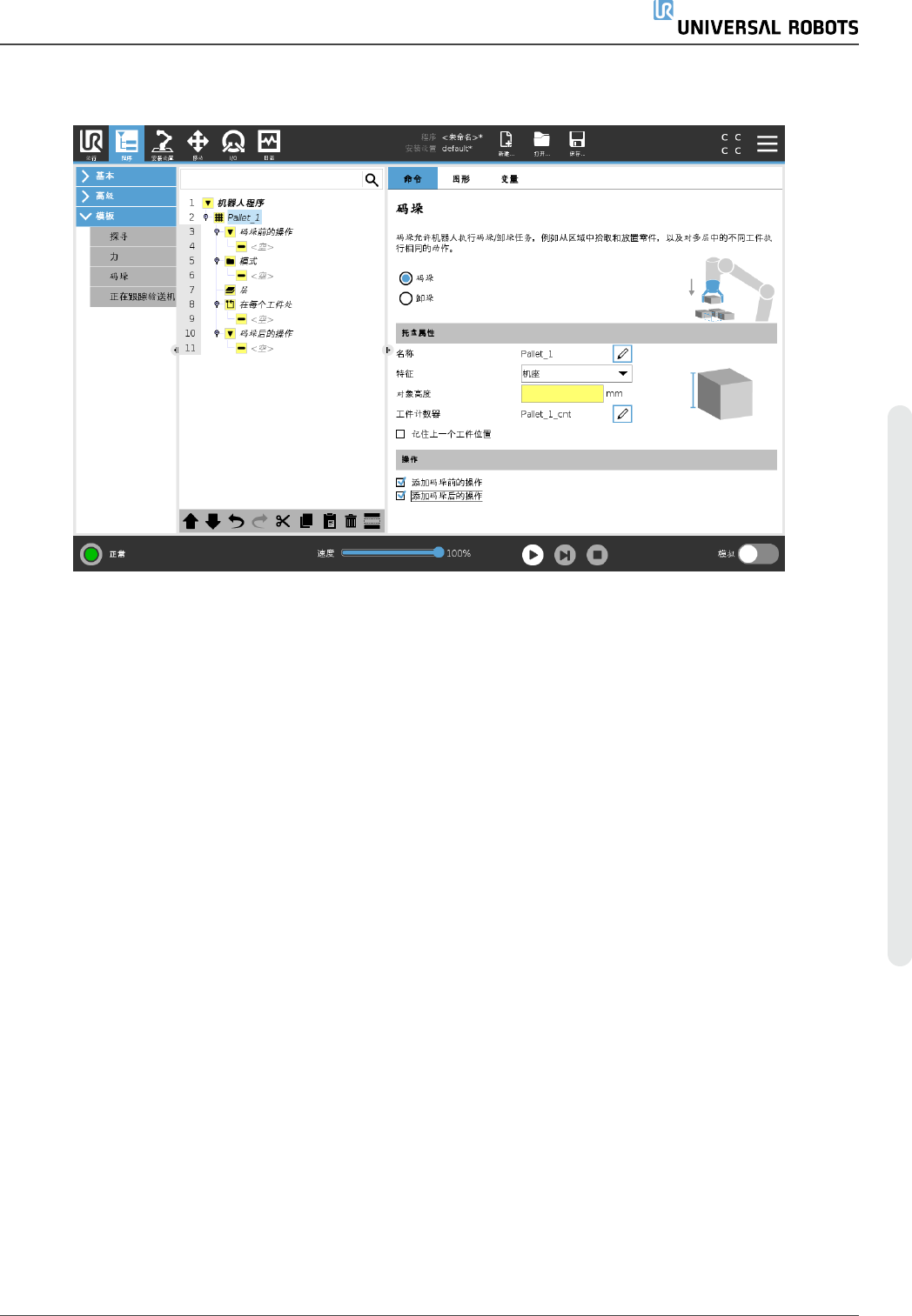
6. 在程序树上,点按模式节点以指定层的模式。您可以创建以下类型的模式:线型、网格或
不规则( 见下图) 。在此屏幕上,您可以选择是否要在层之间加入分隔板( 请参阅在码垛
序列中的层之间添加分离器 在本页164) 。
7. 点击程序树上的模式节点来教机器人分层特定的位置(例如,开始/结束点、网格角和/或
项目数量)。有关示教说明,请参阅24.10.1. 移动 在本页136。必须教授在托盘底部的所有
位置。要复制模式,请在要复制的模式节点屏幕上点按复制模式按钮。
用 户 手 册 161 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
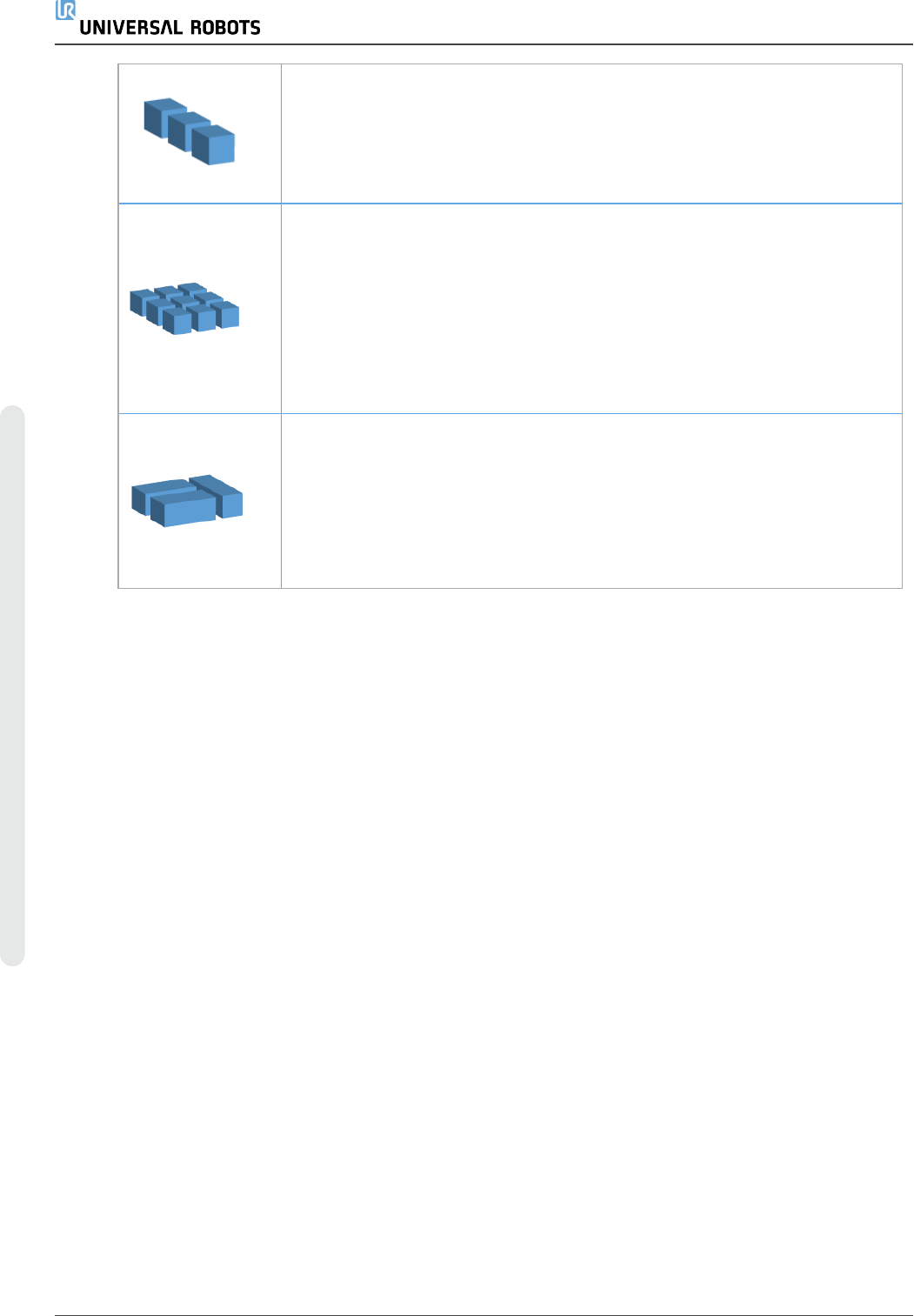
直线要示教位置,请在程序树中选择每个物品:
• StartItem1
• EndItem1
使用屏幕底部的物品数文本框在序列中插入一定数量的物品。
网格要示教位置,请在程序树中选择每个物品:
• CornerItem1
• CornerItem2
• CornerItem3
• CornerItem4
在相应的文本框中插入行数和列数以设置模式的尺寸。
不规则要示教位置,请在程序树中选择每个物品:
• Item1
• Item2
• Item3
点按添加物品以添加和标识序列中的新物品。
8. 在程序树中,点按层节点以配置码垛序列的层。使用选择模式下拉菜单可选择每一层的
模式。点按添加层按钮可为您的程序添加其他层。层必须按照正确的顺序添加,因为添
加之后就不能改变顺序。
9. 在程序树中,点按在每个物品处。选择使用( A) 在每个项目向导的默认选项,或( B) 在每
个项目手动配置。每个选项的说明如下。
( A) 在 每 个 项 目 向 导 中
每个项目向导有助于定义托盘上每个项目上执行的操作,例如ReferencePoint、方式路点、
ToolActionPoint 路点和退出路点( 见下表说明) 。不管不同项目的方向如何,对于每个项目,方
式路点和退出路点保持相同的方向和方向。
1. 点按程序树上的在每个物品处节点。
2. 在“在每个物品处”屏幕上,点按下一步。
3. 点按移至此处按钮。然后,按住自动按钮或使用手动按钮将机器人移动到参考点。点按
继续按钮。点按下一步。
4. 点按设置路点以示教接近路点( 请参阅24.10.1. 移动 在本页136) 。点按下一步。
5. 重复第3步。
6. 点按设置路点以示教退出路点( 请参阅24.10.1. 移动 在本页136) 。点按下一步。
7. 点按完成。
8. 您现在可以在程序树的“工具操作”文件夹中添加适当的抓手动作节点。
UR16e 162 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
工
具
动
作
点
ToolActionPoint 路点:为层中的每个物品执行动作时,您希望机器人所处的位置和定位。
默认情况下,ToolActionPoint路点是ReferencePoint,但可以通过点击ToolActionPoint路点
节点在程序树中进行编辑。使用向导时,ReferencePoint是托盘上首个定义图层中的第一
个位置。ReferencePoint用于向机器人教授图层中每个项目的方式路点,ToolActionPoint
路点和退出路点。
方
式
接近路点:您希望机器人在接近层中的物品时采取的无碰撞位置和方向。
工
具
动
作
工具动作:您希望机器人附件为每个物品执行的动作。
退
出
退出路点:您希望机器人从层中的物品移开时采取的位置和方向。
( B) 手 动 配 置
1. 点按程序树上的在每个物品处节点。
2. 在在每个物品处开始屏幕上,点按手动配置。
3. 使用下拉菜单选择模式和ReferencePoint项。点按使用此参考点按钮设置参考点。
用 户 手 册 163 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。