99469_UR16e_User_Manual_zh_Global.pdf - 第152页
共 享 参 数 “ 移 动 ” 屏 幕 右 下 角 的 共 享 参 数 适 用 于 从 机 器 人 手 臂 的 上 一 个 位 置 到 命 令 下 的 第 一 个 路 点 的 移 动 , 以 及 从 该 路 点 到 每 个 后 续 每 个 路 点 的 移 动 。 “ 移 动 ” 命 令 设 置 不 适 用 于 从 “ 移 动 ” 命 令 下 的 最 后 一 个 路 点 开 始 的 路 径 。 T C P 选 择 根 据 TC P 是 使…
移动命令通过底层路点控制机器人的运动。路点必须位于“移动”命令下。移动命令定义机器手
臂在这些路点之间的加速度和移动速度。
移 动 类型
您可从以下三种移动类型中进行选择:MoveJ、MoveL 和 MoveP。下面将解释每种移动类型。
• moveJ 进行在机器人手臂关节空间中计算的移动。系统控制关节同时完成其移动。此移
动类型将为工具提供一个曲线路径。适用于此移动类型的共享参数为最大关节速度和最
大关节加速度,分别以
°
/
s
和
°
/
s
2
为单位。如果希望机器手臂在路点之间快速移动,而不
用考虑工具在这些路点之间的移动路径,此移动类型是个更可取的选择。
• moveL 使工具中心点 (TCP) 在路点之间进行线性移动。这意味着每个关节都会执行更为
复杂的移动,以使工具保持在直线路径上。可以为此移动类型设置的共享参数为所需的
工具速度和工具加速度( 分别以
mm
/
s
和
mm
/
s
2
指定) 。
• moveP 以恒定速度线性移动工具并进行圆周交融,适用于粘合或分注等工艺操作。默认
情况下,所有路点使用相同的交融半径。值越小,路径转角越大,反之,值越大,路径越
平直。机器手臂以恒定速度经过各路点时,机器人控制箱不会等待 I/O 操作或操作员的
操作。如果存在 I/O 动作或操作员操作,则可能会使机器人手臂停止运动,或导致保护性
停止。
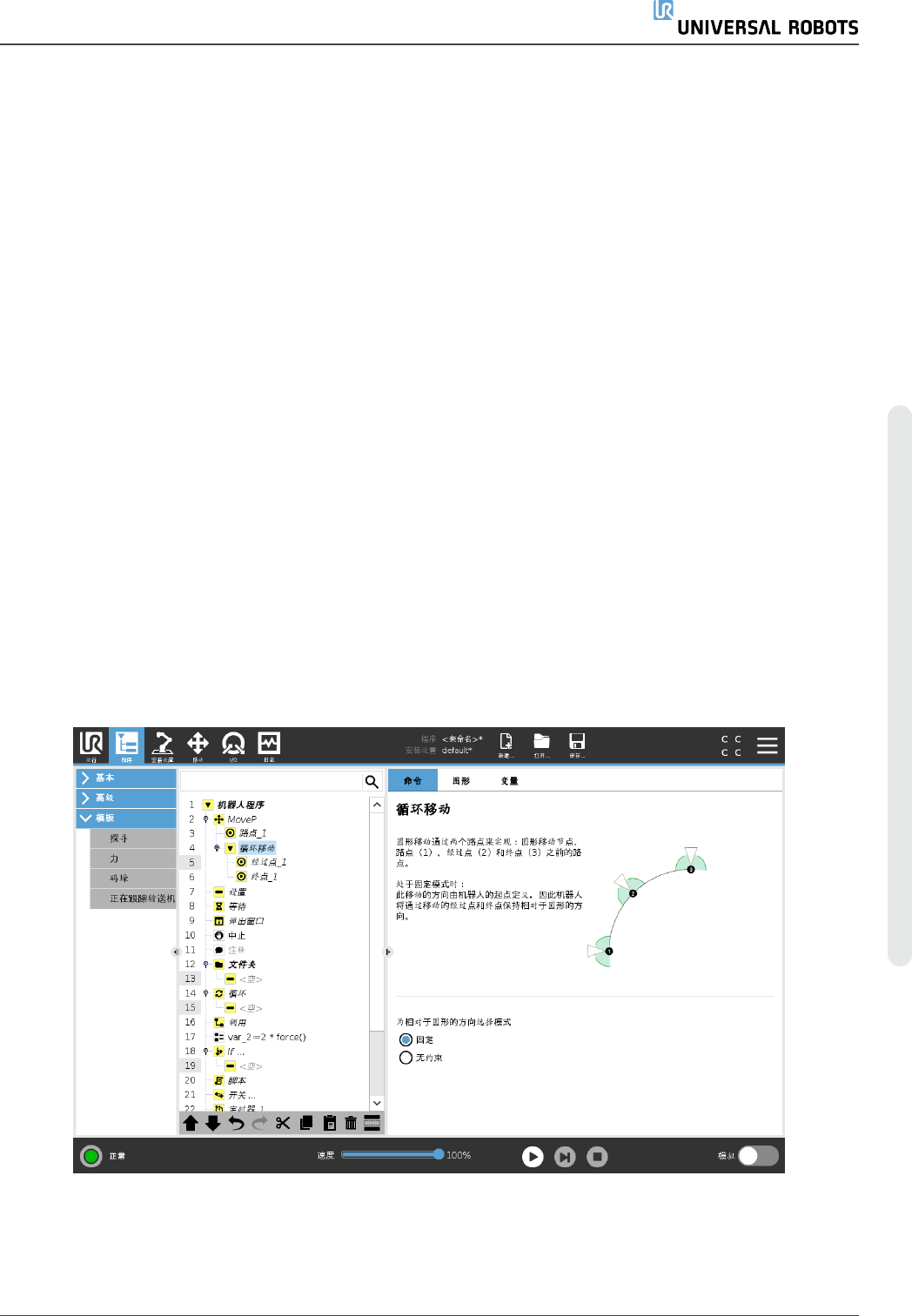
• 圆周移动可以添加到 moveP 命令以进行圆周移动。机器人从当前位置或起点开始移
动,通过圆弧上指定的经过点,然后再通过终点以完成圆周移动。
模式用于通过圆弧计算工具方向。模式可以是:
• 固定:只有起点用于定义工具方向
• 无约束:起点转换为终点以定义工具方向
用 户 手 册 137 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
共 享 参 数
“移动”屏幕右下角的共享参数适用于从机器人手臂的上一个位置到命令下的第一个路点的移
动,以及从该路点到每个后续每个路点的移动。“移动”命令设置不适用于从“移动”命令下的最
后一个路点
开始
的路径。
TCP 选 择
根据 TCP 是使用用户定义的 TCP 还是激活 TCP 来设置,可以调整机器人在路点之间移动的
方式。忽略激活的 TCP 允许相对于工具法兰调整此移动。
在 移 动 中 设 置 TCP
1. 进入程序选项卡屏幕设置用于路点的 TCP。
2. 在命令下,在右侧的下拉菜单中选择移动类型。
3. 在“移动”下,从设置 TCP 下拉菜单中选择一个选项。
4. 选择使用激活的 TCP,或选择用户定义的 TCP。
您也可以选择忽略激活的 TCP。
特 征 选 择
特征空间是“移动”命令下的路点,应在指定这些路点时显示( 请参阅25.17. 特征 在本页202一
节) 。也就是说,设置路点时,程序将记住工具在所选特征的特征空间中的坐标值。以下几种
情况需要详细解释:
所选特征对相对路点没有影响。相对移动始终相对于机座的方向执行。
当机器人手臂移动到可变路点时,系统会将工具中心点 (TCP) 计算为所选特征空间中变量的
坐标。因此,如果选择另一特征,机器手臂向可变路点的移动将不同。
您可以在程序运行时通过将位姿分配给其对应的变量来更改特征的位置。
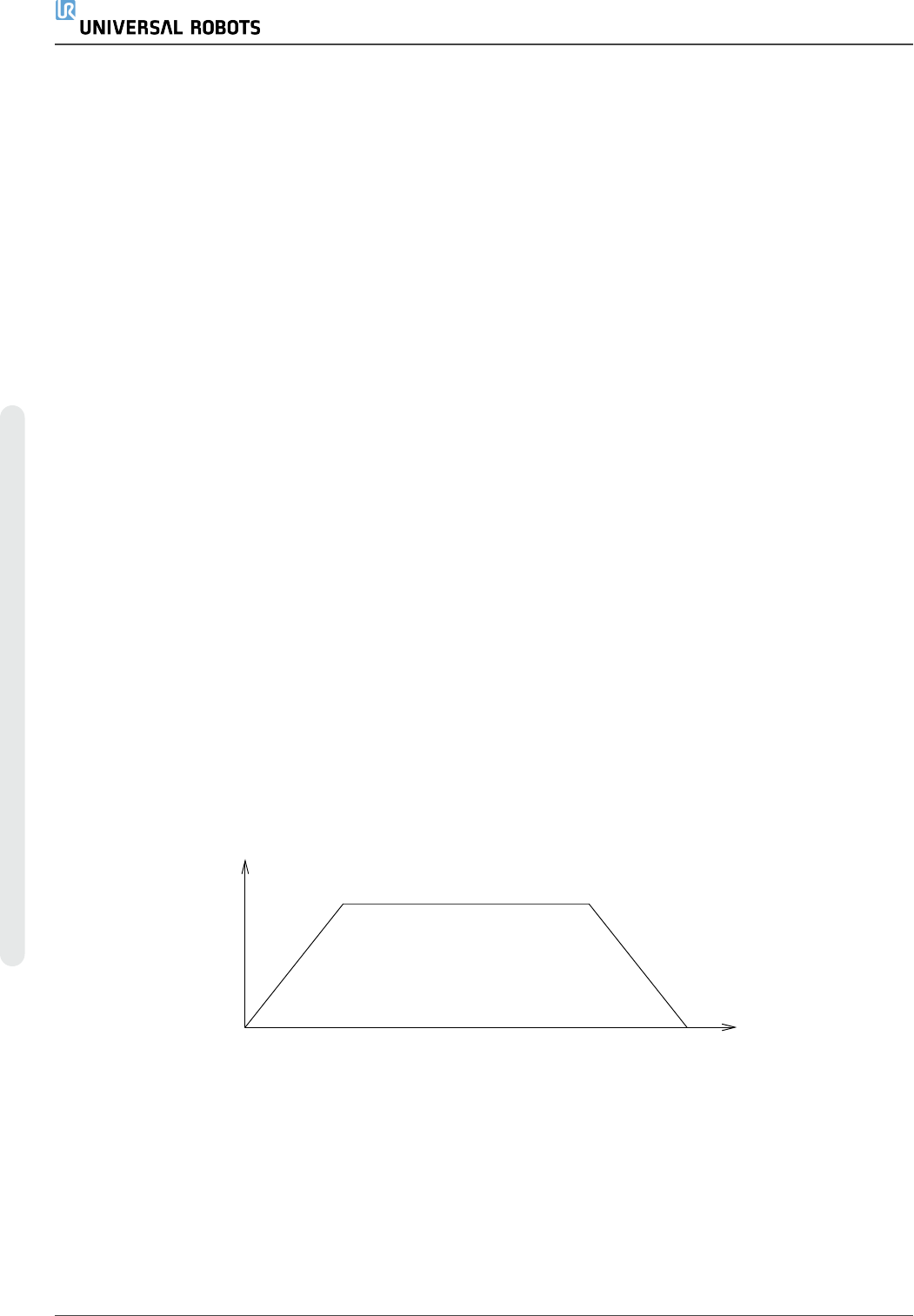
Time
Speed
Acceleration
Cruise
Deceleration
12.1:
运动的速度曲线。速度曲线分为三段:加速、稳速和减速。稳速阶段的速度水平由运动
的速度设置确定,加速和减速阶段的陡度则由加速参数确定。
使 用 关 节 角 度
作为 3D 位姿的替代,使用 MoveJ 通过机器人关节角度定义路点时,您可以选中使用关节角度
复选框。如果启用使用关节角度,TCP 和特征选项将不可用。当程序在机器人之间移动时,不
会调整使用使用关节角度定义的路点。
UR16e 138 用 户 手 册
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。
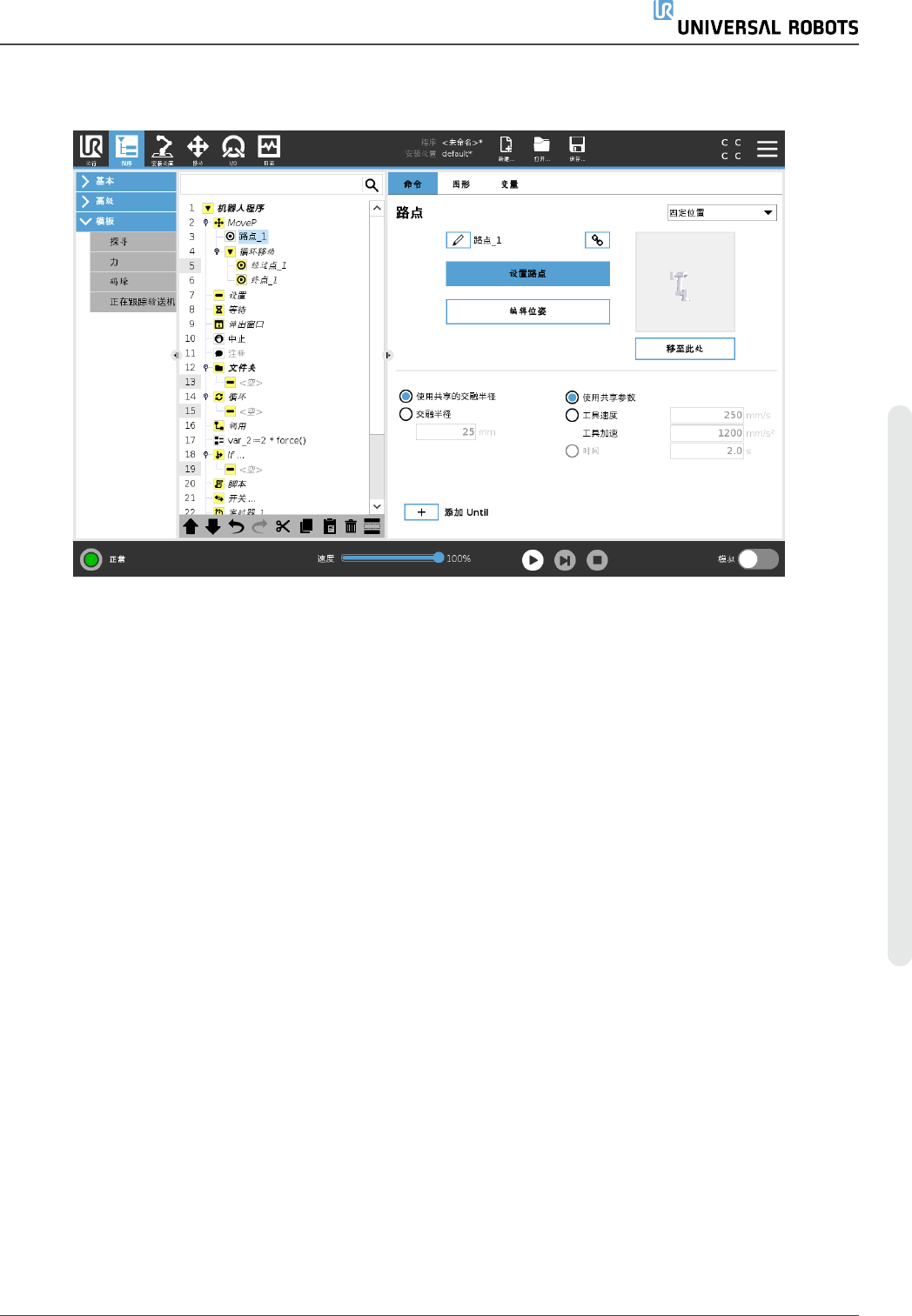
24.10.2. 固定路点
机器人路径上的点。路点是机器人程序最核心的部分,用于指示机器人手臂应移动到哪个位
置。固定位置路点通过将机器手臂实际移至相应位置来示教。
示 教 路 点
示教是用于向机器人显示如何根据应用的特征定位 TCP 的术语。如要向机器人示教一个路
点,请按以下说明操作:
1. 在“程序”选项卡中,插入一个移动节点。
2. 在移动节点上,使用设置 TCP 下拉菜单设置 TCP。
3. 在移动节点上,使用特征下拉菜单选择一个特征。
4. 在路点节点上,使用示教模式或缓慢移动将机器人定位于所需配置。
使 用 路 点
使用路点意味着在当前情况下应用特征与 TCP 之间的示教关系。应用于当前所选特征的特征
与 TCP 之间的关系实现了期望的 TCP 位置。然后机器人计算出如何定位自己以使当前活动
的 TCP 到达该 TCP 位置。如要使用一个路点,请按以下说明操作:
1. 在移动节点中使用现有路点,或将路点插入到不同的移动节点中
( 比如通过复制和粘贴或使用路点上的“链接”按钮) 。
2. 设置目标 TCP。
3. 设置目标特征。
用 户 手 册 139 UR16e
24.程 序选 项卡
版 权所 有 © 2009–2021UniversalRobotsA/S。保留 所 有 权利。