OM-1461-001_w.pdf - 第60页
57 0712-001-(M845WC-A1003) X-Axis (1) Motor Circuit Diagram 3 M :1 -X2100 :2 :3 -M21E :3 :1 :2 -M21 :1 X-Axis -X21 1A -X2102 -M21 W V -A21 L2 L3 CN1A CN2 PE PE U L1 3φAC200V AC200V -X21 1B CN1B 20 10 CN10 -X2410 -X241 1 …
56
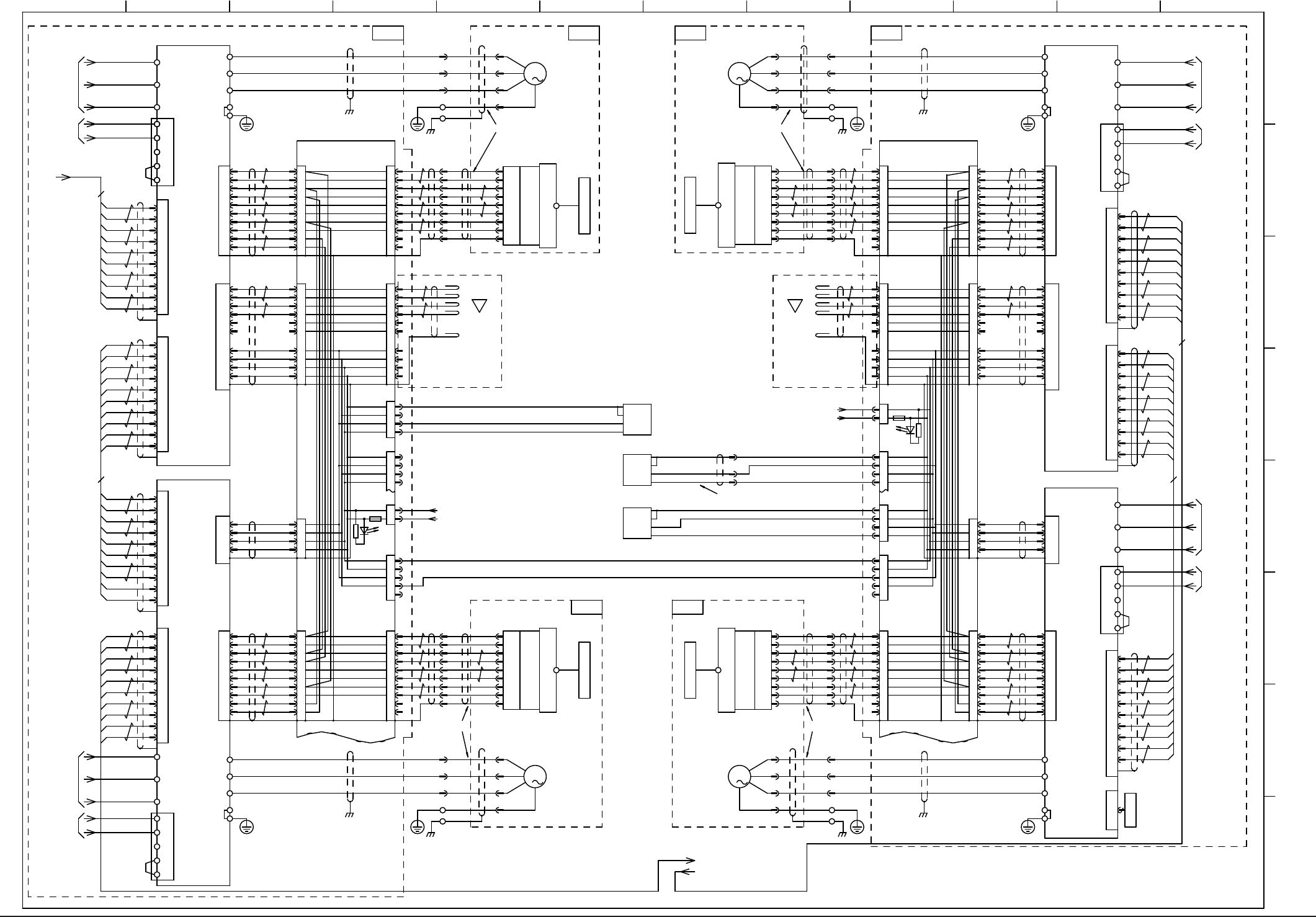
0712-001-(M845WC-A1002)
Y-Axis (3,4) Motor Circuit Diagram
3
M
3
M
3
M
3
M
:1
:3
:2
:1 :1
:2
:3
:1
:2
:3
:1
:1
:2
:3
-X12301
:3
:2
-X2300
:1
-M23
:1
:2
:3
-M23E
:1
-X12201
:3
:2
-X2200
:1 :1
-M22
:2
:3
-B2201
-X221A
-X221B
-X2202
-X2203
-X2302
-X2303
AC200V
3φAC200V
L3
L2
PE
V
W
CN1A
CN1B
L1
U
10B
24B1R
3φAC200V
AC200V
L2
L3
L1
PE
W
U
V
CN1A
CN1B
W
V
L2
L3
CN1A
CN1B
CN2
PE
CN3
U
L1
3φAC200V
AC200V
W
V
U
L1
L2
L3
CN1A
-X231A
CN1B
-X231B
CN2
PE
CN3
3φAC200V
AC200V
-X2401-X2402
-X2404-X2403
-U24
10
10
10
10
-M22E
-X2200-M22
-X221B
-X221A
-X231A
-X231B
-X2404
-X12301
-M23E
-X2300-M23
CN6 CN5
CN2 CN1
CN7
CN3 CN4
OUT
-
L
+
+
-
OUT
-B2202
-X12103
+
L
-
OUT
-B2203
CN8
CN10
CN9
CN3
-X2403
CN2
-X2302
CN9
CN7
-X2303
CN3
CN10
CN8
CN1 CN2
CN5 CN6
-X2402-X2401
CN3
CN2
-X2203
-X2202
-X12201
-U24
CN12
24B1R
CN12
10B
20
-X2407
-X2406
-X2405
-X2408
-X2410
-X2412
-X2409
-X2406
-X2412
-X2408
-X2409
CN4
-X2407
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
17
1
7
2
TD
RD*
RD
TD*
4
14
11
12
EMG
EMG*
SD
LG
LG
D
C
P
L21
L11
D
C
P
L21
L11
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
17
1
7
2
TD
RD*
RD
TD*
4
14
11
12
EMG
EMG*
SD
LG
LG
D
C
P
L21
L11
L11
L21
P
C
D
L11
L21
P
C
D
SD
17
1
7
2
TD
RD*
RD
TD*
4
14
11
12
EMG
EMG*
LG
LG
SD
17
1
7
2
TD
RD*
RD
TD*
4
14
11
12
EMG
EMG*
LG
LG
SD
17
1
7
2
TD
RD*
RD
TD*
4
14
11
12
EMG
EMG*
LG
LG
-M22E
:1
-L326
-L226
-L126
-L121
-L221
AC200V
3φAC200V
AC200V
3φAC200V
3φAC200V
AC200V
-L221
-L121
-L126
-L226
-L326
-L221
-L121
-L131
-L231
-L331
-L331
-L231
-L131
-L121
-L221
-U22
-U22 -U22
-U22
-U23
-U23 -U23
-U23
[B-/01/12B]
[B-/01/12C]
[C-/05/2E]
[B-/01/12C]
[B-/01/12D]
[B-/01/12E]
[B-/01/12F]
[B-/01/12F]
[B-/01/12F]
[BR/01/12B]
[BR/01/12B]
[C-/06/1C]
[C-/06/2E]
15
5
LG
LG
15
5
LG
LG
15
5
LG
LG
LG
LG
5
15
5
15
5
15
LG
LG
5
15
LG
LG
LG
LG
L
Y1-Axis
-M22
-A22
-M22
-A23
Servo Motor AMP
Y1
-A22
Servo Motor AMP
Y1
Servo Motor AMP
Y2
-A23
Servo Motor AMP
Y2
Y1-Axis
Y2-Axis
-M23 -M23
Y2-Axis
-X2405 -X2405-X2405
X Bean (4)-X211B
X Bean (4)-X211A
1
17
7
11
20
6
16
4
14
19
3
19
20
5
P5
LG
MRR
MR
LG
P5
MD
MDR
MD2
MDR2
SD
SG
LSP
LSN
COM
LAR
LA
6
16
LBR
LB
7
17
LZR
LZ
8
18
:13
:5
:2
:4
:12
:10
:8
:15
:SD
19
14
4
16
6
20
11
7
17
1 1
17
7
11
20
6
16
4
14
19
18
8
17
7
16
6
5
20
19
3
6
16
7
17
8
18
SD
3
19
20
5
SD
COM
LSN
LSP
SG
5
20
19
3
19
14
4
16
6
20
11
7
17
11
17
7
11
20
6
16
4
14
19
:SD
:15
:8
:10
:12
:4
:2
:5
:13
SD
MDR2
MD2
MDR
MD
P5
LG
MR
MRR
LG
P5
19
14
4
16
6
20
11
7
17
1
3
19
20
5
:8
:9
:7
1
3
2
10
8
9
4
7
2
1
3
4
7
:13
:5
:4
:12
:10
:8
:15
:SD
:2
1
17
7
11
20
6
16
4
14
19
1
17
7
11
20
6
16
4
14
19
P5
LG
MRR
MR
LG
P5
MD
MDR
MD2
MDR2
SD
19
14
4
16
6
20
11
7
17
1
7
4
3
1
2
5
20
19
3
3
19
20
5
SG
LSP
LSN
COM
SD
7
4
9
8
10
2
3
1
5
20
19
3
SD
18
8
17
7
16
6
3
19
20
5
6
16
7
17
8
18
19
14
4
16
6
20
11
7
17
1 1
17
7
11
20
6
16
4
14
19
:SD
:15
:8
:10
:12
:4
:2
:5
:13
18
8
LZ
LZR
17
7
LB
LBR
16
6
LA
LAR
COM
LSN
LSP
SG
SD
MDR2
MD2
MDR
MD
P5
LG
MR
MRR
LG
P5
5
20
19
3
19
14
4
16
6
20
11
7
17
1
2
1
1
2
BC BCC-(3)
C-(3)
C-(4)
C-(4)
6
15
8
10
12
4
2
5
13
/RQ
RQ
FG
0V
/SD
SD
5V
5V
SD
/SD
0V
FG
RQ
/RQ
13
5
2
4
12
10
8
15
6
5V
SD
/SD
0V
FG
RQ
/RQ
13
5
2
4
12
10
8
15
6
/RQ
RQ
FG
0V
/SD
SD
5V
6
15
8
10
12
4
2
5
13
1
2 3 4 5 6 7 8 9 10 11 12
A
B
C
D
E
F
G
H
S
S
Change the cable
arrangement only when
the multi-function heads
are mounted on the
Block 3.
Change the cable
arrangement only when
the multi-function heads
are mounted on the
Block 4.
Robot Cable
Y Beam (4)Y Beam (3)
X Beam (3) From -X211B
Robot Cable
Robot Cable
Y-Axis Limit(-)
Y-axis Access Detection
Y-Axis Limit(+)
Plate
Plate Plate
Plate
Robot Cable
Robot Cable
Linear Scale HeadLinear Scale Head
Linear Scale HeadLinear Scale Head
Converter
5V/Sensor
0V/Sensor
0V/Sensor
5V/Sensor
Converter
0V/Sensor
5V/Sensor 5V//Sensor
0V//Sensor
Converter
Converter
Control Circuit
Power Source
Main Circuit
Power Source
Control Circuit
Power Source
Main Circuit
Power Source
Control Circuit
Power Source
Main Circuit
Power Source
Control Circuit
Power Source
Main Circuit
Power Source
Terminal Connector
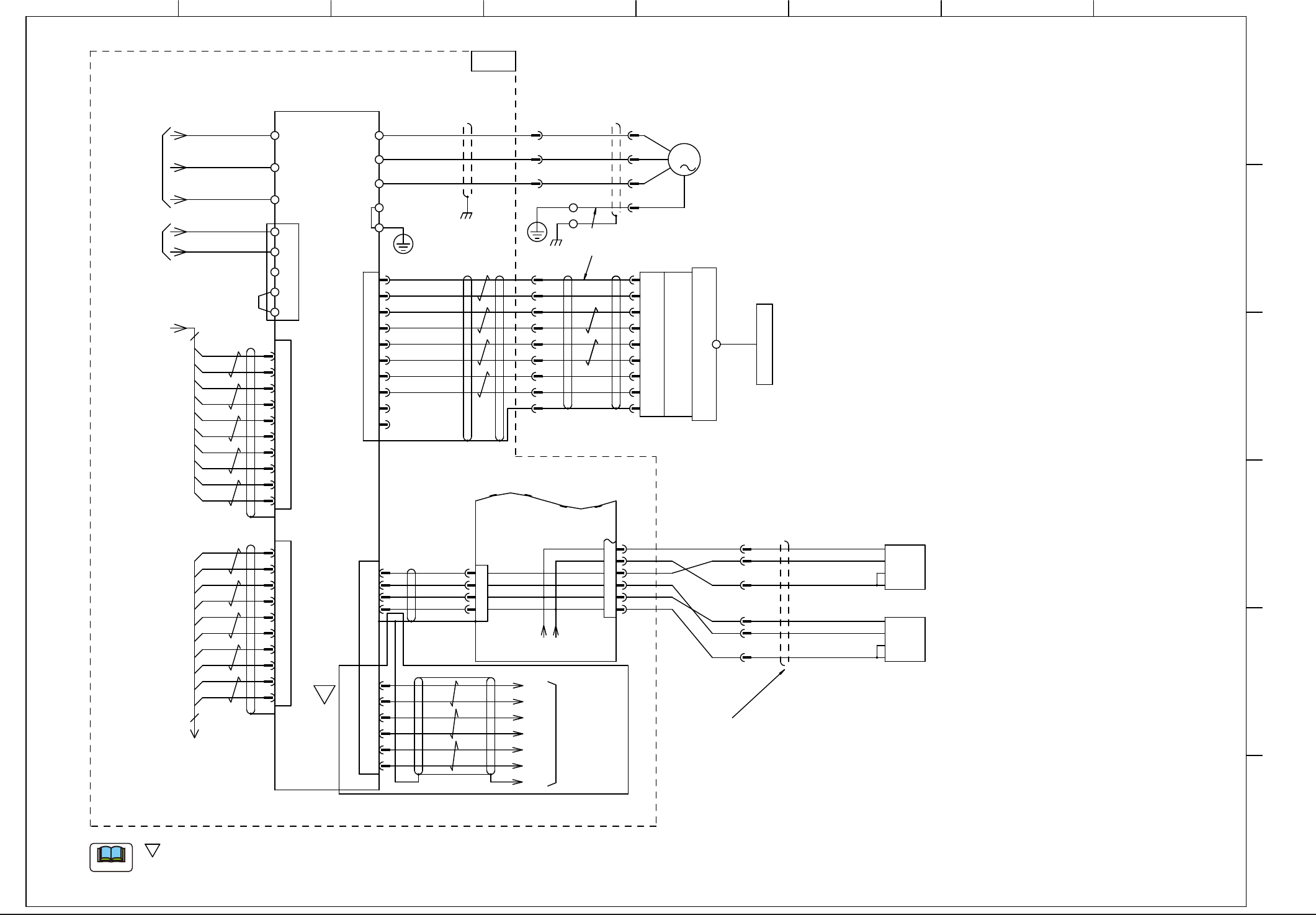
57
0712-001-(M845WC-A1003)
X-Axis (1) Motor Circuit Diagram
3
M
:1
-X2100
:2
:3
-M21E
:3
:1
:2
-M21
:1
X-Axis
-X211A
-X2102
-M21
W
V
-A21
L2
L3
CN1A
CN2
PE
PE
UL1
3φAC200V
AC200V
-X211B
CN1B
20
10
CN10
-X2410
-X2411
CN11
CN3
-X2103
10B 24B1L
-U24
D
C
P
L21
L11
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
-L221
-L121
-L336
-L236
-L136
OUT
-
+
-B2101
:2
-X12103
:3
:1
:4
:6
:5
-X12102
-U21
-U21
[B-/01/6E]
[B-/01/6E]
[F-/12/6A]
[C-/01/1B]
15
5
LG
LG
15
5
LG
LG
L
OUT
-
+
-B2102
L
Servo Motor AMP
X
[R-/12/6A]
CPU2-L
FB-U82(ID:0)
Robot Cable
SSCNET
X-Axis Limit (+)
X-Axis Limit (-)
Robot Cable
X Beam (1)
To Y Beam (1)-X221A
(-X8201)
BA
6
4
5
3
3
19
20
5
SG
LSP
LSN
COM
Plate
SD
6
4
3
5
1
2
Main Circuit
Power Source
Control Circuit
Power Source
:SD
:15
:8
:10
:12
:4
:2
:5
:13
1
17
7
11
20
6
16
4
14
19
P5
LG
MRR
MR
LG
P5
MD
MDR
MD2
MDR2
SD
6
15
8
10
12
4
2
5
13
Converter
/RQ
RQ
FG
5V/Sensor
0V/Sensor
0V
/SD
SD
5V
Linear Encoder
1
7
6
3
5
2
LAR
LA
LZR
LZ
LB
LBR
16
17
7
8
18
6
SIELD
X19401
Recognition CPU
To Counter Board
U94
1 2 3 4 5 6 7 8
A
B
C
D
E
F
S
" " mark shows that the wiring should be changed between
the servo-motor amplifier -A21-CN3 and the recognition board U94-X19401
in the case that the multi-functional heads are mounted on the Block 1.
S
Note
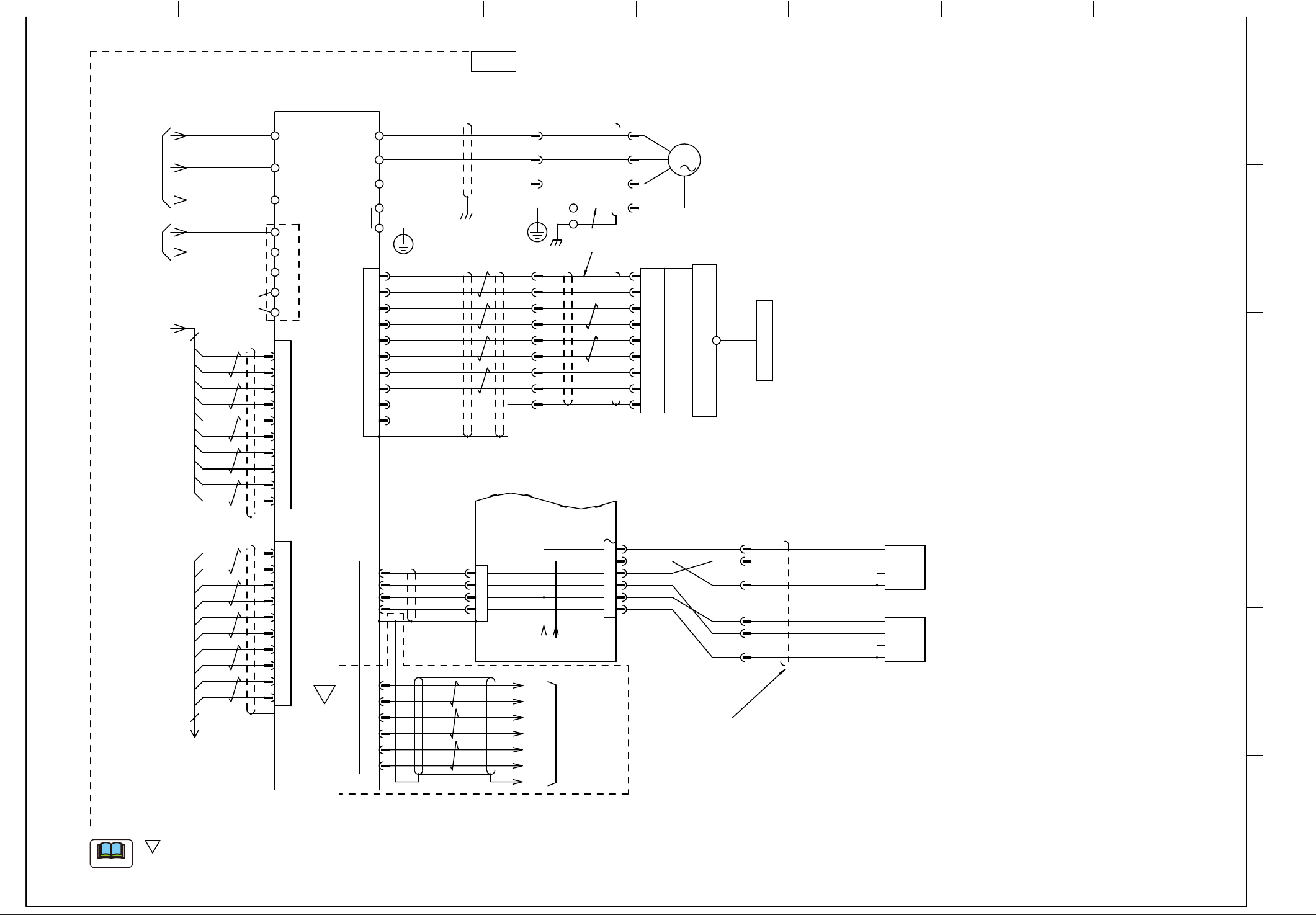
58
0712-001-(M845WC-A1004)
X-Axis (2) Motor Circuit Diagram
3
M
-X12102
-X2102
W
V
L2
L3
CN2
PE
PE
UL1
3φAC200V
AC200V
CN10
-X2410
-X2411
CN11
CN3
-X2103
10B 24B1L
-U24
D
C
P
L21
L11
:2
:1
:3
-M21E
:3
:2
-X2100
:1
:1
-M21
-L136
-L236
-L336
-L121
-L221
:5
:6
:4
:1
:3
-X12103
:2
-U21
-U21
[B-/01/6H]
[B-/01/6H]
[C-/01/7H]
[C-/01/7H]
-X211A
CN1A
-X211B
CN1B
10
10
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
15
5
LG
LG
15
5
LG
LG
OUT
-
+
-B2101
L
OUT
-
+
-B2102
L
X-Axis
-M21
-A21
Servo Motor AMP
X
[R-/12/6A]
:SD
:15
:8
:10
:12
:4
:2
:5
:13
Y Beam (1) From-X231B
1
17
7
11
20
6
16
4
14
19
P5
LG
MRR
MR
LG
P5
MD
MDR
MD2
MDR2
SD
BA
6
4
5
3
3
19
20
5
SG
LSP
LSN
COM
Plate
SD
6
4
3
5
1
2
6
15
8
10
12
4
2
5
13
/RQ
RQ
FG
0V
/SD
SD
5V
1
7
6
3
5
2
LAR
LA
LZR
LZ
LB
LBR
16
17
7
8
18
6
SIELD
X29401
U94
1 2 3 4 5 6 7 8
A
B
C
D
E
F
S
Robot Cable
X-Axis Limit (+)
X-Axis Limit (-)
Robot Cable
X Beam (2)
To Y Beam (2)-X221A
Main Circuit
Power Source
Control Circuit
Power Source
Converter
5V/Sensor
0V/Sensor
Linear Encoder
Recognition CPU
To Counter Board
" " mark shows that the wiring should be changed between
the servo-motor amplifier -A21-CN3 and the recognition board U94-X19401
in the case that the multi-functional heads are mounted on the Block 2.
S
Note