OM-1461-001_w.pdf - 第62页
59 0712-001-(M845WC-A1005) X-Axis (3) Motor Circuit Diagram 3 M -X12102 -X2102 W V L2 L3 CN2 PE PE U L1 3φAC200V AC200V CN10 -X2410 -X241 1 CN1 1 CN3 -X2103 10B 24B1R -U24 D C P L21 L1 1 :2 :1 :3 -M21E :3 :2 -X2100 :1 :1…
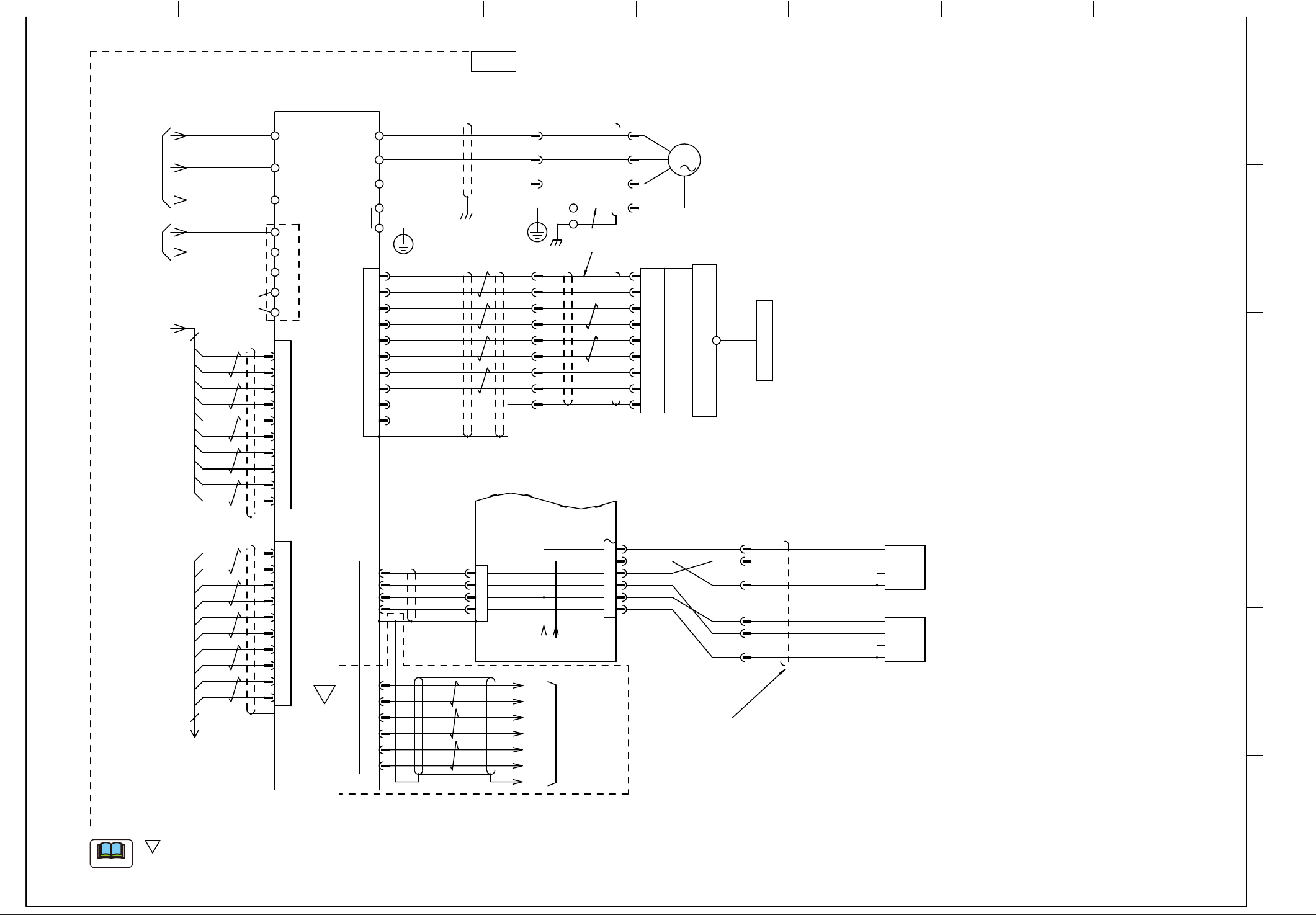
58
0712-001-(M845WC-A1004)
X-Axis (2) Motor Circuit Diagram
3
M
-X12102
-X2102
W
V
L2
L3
CN2
PE
PE
UL1
3φAC200V
AC200V
CN10
-X2410
-X2411
CN11
CN3
-X2103
10B 24B1L
-U24
D
C
P
L21
L11
:2
:1
:3
-M21E
:3
:2
-X2100
:1
:1
-M21
-L136
-L236
-L336
-L121
-L221
:5
:6
:4
:1
:3
-X12103
:2
-U21
-U21
[B-/01/6H]
[B-/01/6H]
[C-/01/7H]
[C-/01/7H]
-X211A
CN1A
-X211B
CN1B
10
10
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
15
5
LG
LG
15
5
LG
LG
OUT
-
+
-B2101
L
OUT
-
+
-B2102
L
X-Axis
-M21
-A21
Servo Motor AMP
X
[R-/12/6A]
:SD
:15
:8
:10
:12
:4
:2
:5
:13
Y Beam (1) From-X231B
1
17
7
11
20
6
16
4
14
19
P5
LG
MRR
MR
LG
P5
MD
MDR
MD2
MDR2
SD
BA
6
4
5
3
3
19
20
5
SG
LSP
LSN
COM
Plate
SD
6
4
3
5
1
2
6
15
8
10
12
4
2
5
13
/RQ
RQ
FG
0V
/SD
SD
5V
1
7
6
3
5
2
LAR
LA
LZR
LZ
LB
LBR
16
17
7
8
18
6
SIELD
X29401
U94
1 2 3 4 5 6 7 8
A
B
C
D
E
F
S
Robot Cable
X-Axis Limit (+)
X-Axis Limit (-)
Robot Cable
X Beam (2)
To Y Beam (2)-X221A
Main Circuit
Power Source
Control Circuit
Power Source
Converter
5V/Sensor
0V/Sensor
Linear Encoder
Recognition CPU
To Counter Board
" " mark shows that the wiring should be changed between
the servo-motor amplifier -A21-CN3 and the recognition board U94-X19401
in the case that the multi-functional heads are mounted on the Block 2.
S
Note
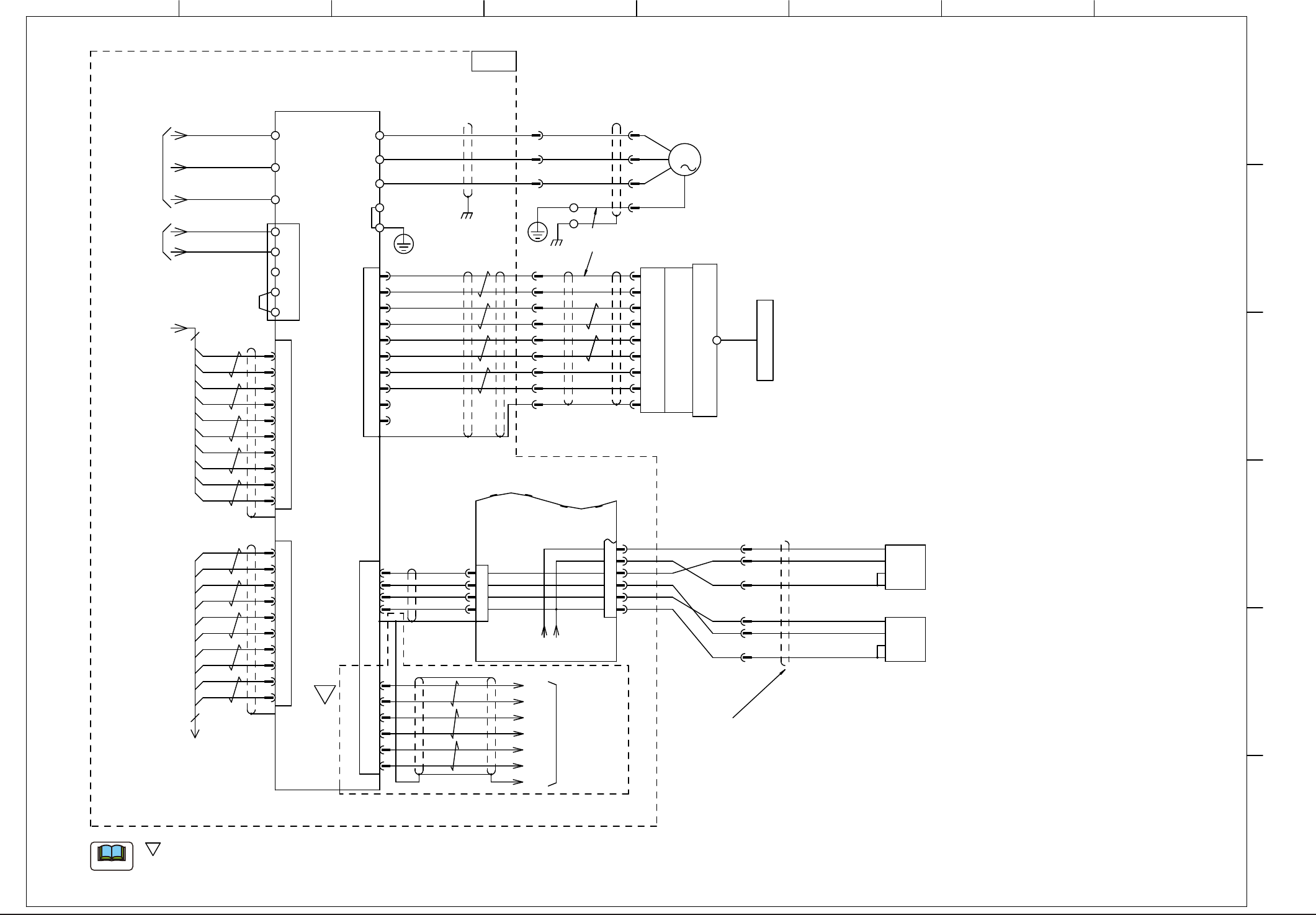
59
0712-001-(M845WC-A1005)
X-Axis (3) Motor Circuit Diagram
3
M
-X12102
-X2102
W
V
L2
L3
CN2
PE
PE
UL1
3φAC200V
AC200V
CN10
-X2410
-X2411
CN11
CN3
-X2103
10B 24B1R
-U24
D
C
P
L21
L11
:2
:1
:3
-M21E
:3
:2
-X2100
:1
:1
-M21
-L136
-L236
-L336
-L121
-L221
:5
:6
:4
:1
:3
-X12103
:2
-U21
-U21
[B-/01/12D]
[B-/01/12D]
[C-/02/1B]
-X211A
CN1A
-X211B
CN1B
20
10
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
15
5
LG
LG
15
5
LG
LG
[F-/22/6A]
OUT
-
+
-B2101
L
OUT
-
+
-B2102
L
X-Axis
-M21
-A21
Servo Motor AMP
X
Robot Cable
X-Axis Limit (+)
X-Axis Limit (-)
Robot Cable
X Beam (3)
To Y Beam (3)-X221A
Plate
Main Circuit
Power Source
Control Circuit
Power Source
Converter
5V/Sensor
0V/Sensor
Linear Encoder
Recognition CPU
To Counter Board
" " mark shows that the wiring should be changed between
the servo-motor amplifier -A21-CN3 and the recognition board U94-X19401
in the case that the multi-functional heads are mounted on the Block 3.
S
Note
[R-/12/6A]
:SD
:15
:8
:10
:12
:4
:2
:5
:13
1
17
7
11
20
6
16
4
14
19
P5
LG
MRR
MR
LG
P5
MD
MDR
MD2
MDR2
SD
BC
6
4
5
3
3
19
20
5
SG
LSP
LSN
COM
SD
6
4
3
5
1
2
6
15
8
10
12
4
2
5
13
/RQ
RQ
FG
0V
/SD
SD
5V
CPU2-R
FD-U82(ID:0)
SSCNET
(-X8201)
1
7
6
3
5
2
LAR
LA
LZR
LZ
LB
LBR
16
17
7
8
18
6
SIELD
X39401
U94
1 2 3 4 5 6 7 8
A
B
C
D
E
F
S
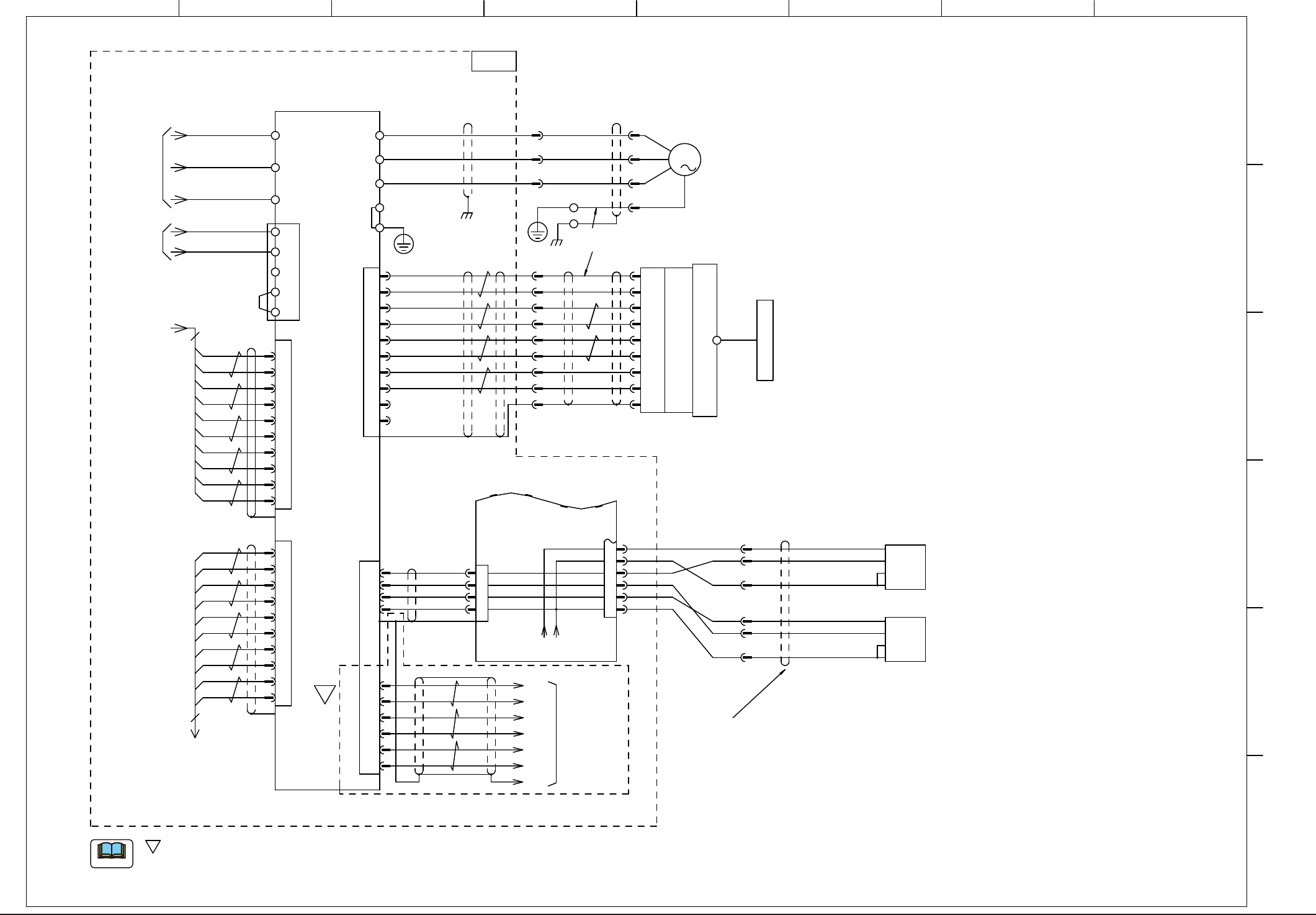
60
0712-001-(M845WC-A1006)
X-Axis (4) Motor Circuit Diagram
3
M
-X12102
-X2102
W
V
L2
L3
CN2
PE
PE
UL1
3φAC200V
AC200V
CN10
-X2410
-X2411
CN11
CN3
-X2103
10B 24B1R
:2
-X12103
:3
:1
:4
:6
:5
-U24
D
C
P
L21
L11
:2
:1
:3
-M21E
:3
:2
-X2100
:1
:1
-M21
-L136
-L236
-L336
-L121
-L221
-U21
-U21
[B-/01/12G]
[B-/01/12G]
[C-/02/7H]
[C-/02/7H]
-X211A
CN1A
-X211B
CN1B
10
10
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
LG
LG
SD
EMG*
EMG
12
11
14
4
TD*
RD
RD*
TD
2
7
1
17
15
5
LG
LG
15
5
LG
LG
OUT
-
+
-B2101
L
OUT
-
+
-B2102
L
X-Axis
-M21
-A21
Servo Motor AMP
X
[R-/12/6A]
:SD
:15
:8
:10
:12
:4
:2
:5
:13
1
17
7
11
20
6
16
4
14
19
P5
LG
MRR
MR
LG
P5
MD
MDR
MD2
MDR2
SD
BC
6
4
5
3
3
19
20
5
SG
LSP
LSN
COM
SD
6
4
3
5
1
2
6
15
8
10
12
4
2
5
13
/RQ
RQ
FG
0V
/SD
SD
5V
1
7
6
3
5
2
LAR
LA
LZR
LZ
LB
LBR
16
17
7
8
18
6
SIELD
X49401
U94
1 2 3 4 5 6 7 8
A
B
C
D
E
F
S
Y Beam (3) From-X231B
Plate
Robot Cable
X-Axis Limit (+)
X-Axis Limit (-)
Robot Cable
X Beam (4)
To Y Beam (4)-X221A
Main Circuit
Power Source
Control Circuit
Power Source
Converter
5V/Sensor
0V/Sensor
Linear Encoder
Recognition CPU
To Counter Board
" " mark shows that the wiring should be changed between
the servo-motor amplifier -A21-CN3 and the recognition board U94-X19401
in the case that the multi-functional heads are mounted on the Block 4.
S
Note