JUKI_KE-3010A_MAINTE_CH.pdf - 第80页
维修调整要领书 2-5 2-1 -3 . IC 贴装头( KE - 3020VRA ) 1 ) 从伺服放大器基板上拆下 Z 、 θ 马达线束。( 2-1-1 章之 7 )项的第 4 段的全部连接器) 2 ) 从贴装头主基板上拆下 T 传感器线束①。( CN2 7 ) 3 ) 从 FMLA 传感器上拔下 LA 连接电缆的插头②( 3 处)。 4 ) 卸下 φ4 空气管。(参照 2-1-2 项) 5 ) 卸下释放闩。(参照 2-5 项) 6…
维修调整要领书
2-4
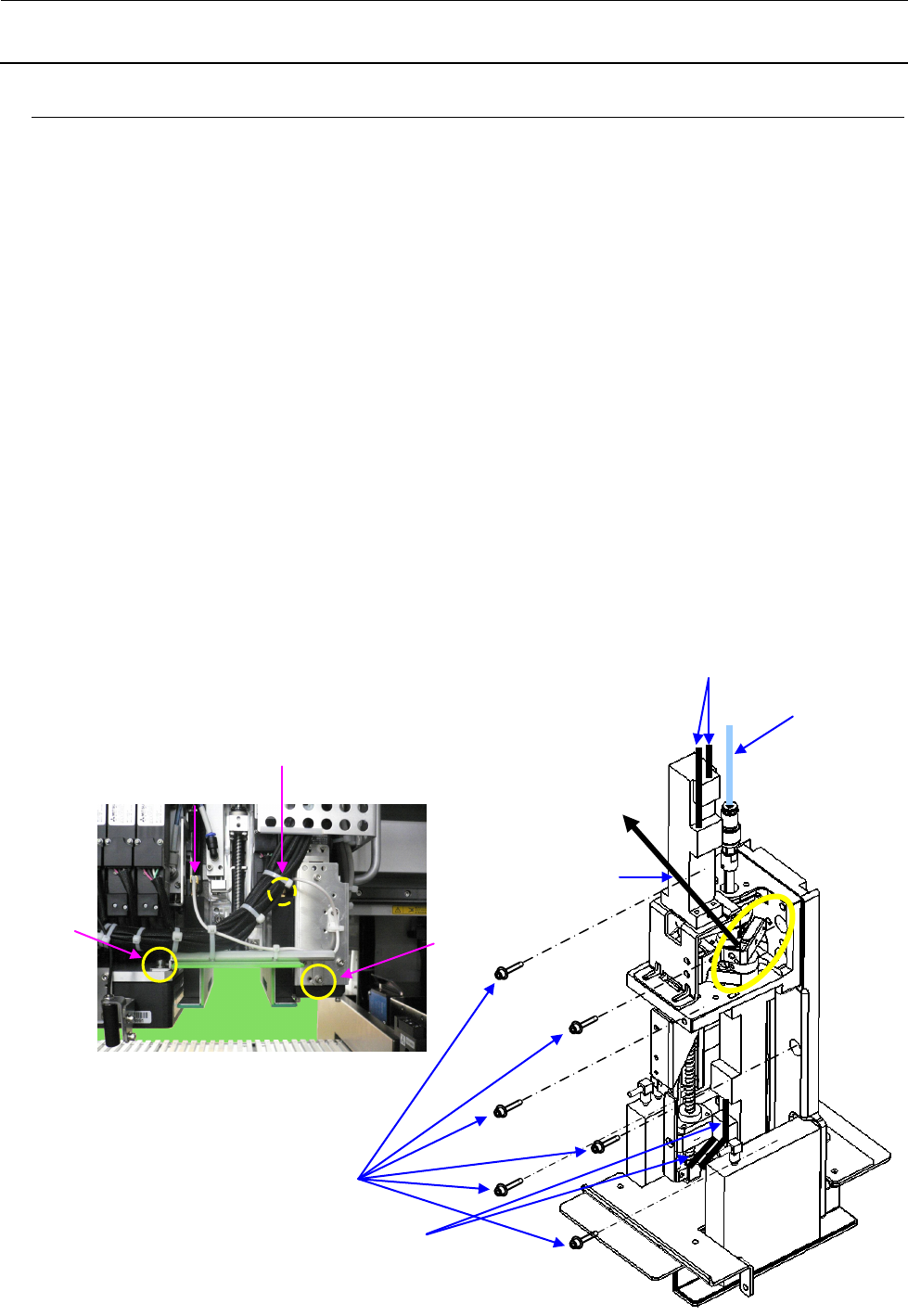
2-1-2.
IC 贴装头(KE-3020VA)
1) 从伺服放大器基板上拆下 Z、θ 马达线束。(2-1-1 章之 7)项的第 4 段的全部连接器)
2) 从贴装头主基板上拆下 T 传感器线束。(CN27)
3) 从触点传感器中拔出 2 根光缆,将托架从放大器主体上拆下。
4) 卸下 φ4 空气管。
5) 卸下释放闩。(参照 2-5 项)
6) 请用手压住以免 IC 贴装头落下,同时取下 M5×20 带垫片螺丝(6 个)(图 2-1-7)。
7) 将 IC 贴装头抬起,不要碰到其他元件。
8) 装配请按相反的步骤进行。
※ 装配时请对 IC 贴装头安装螺丝(6 个)涂敷 LOCTITE242 粘结剂,以安装扭矩 7.0Nm 进行固定。
9) 更换贴装头后,需要重新输入 MS 参数。
输入项目请参照 2-8 项。
触点传感器放大器
M5×20带垫片螺丝(6个)
θ马达线束
φ4空气管
Z马达线束
T传感器线束
贴装头主基板
往(CN27)
维修调整要领书
2-5
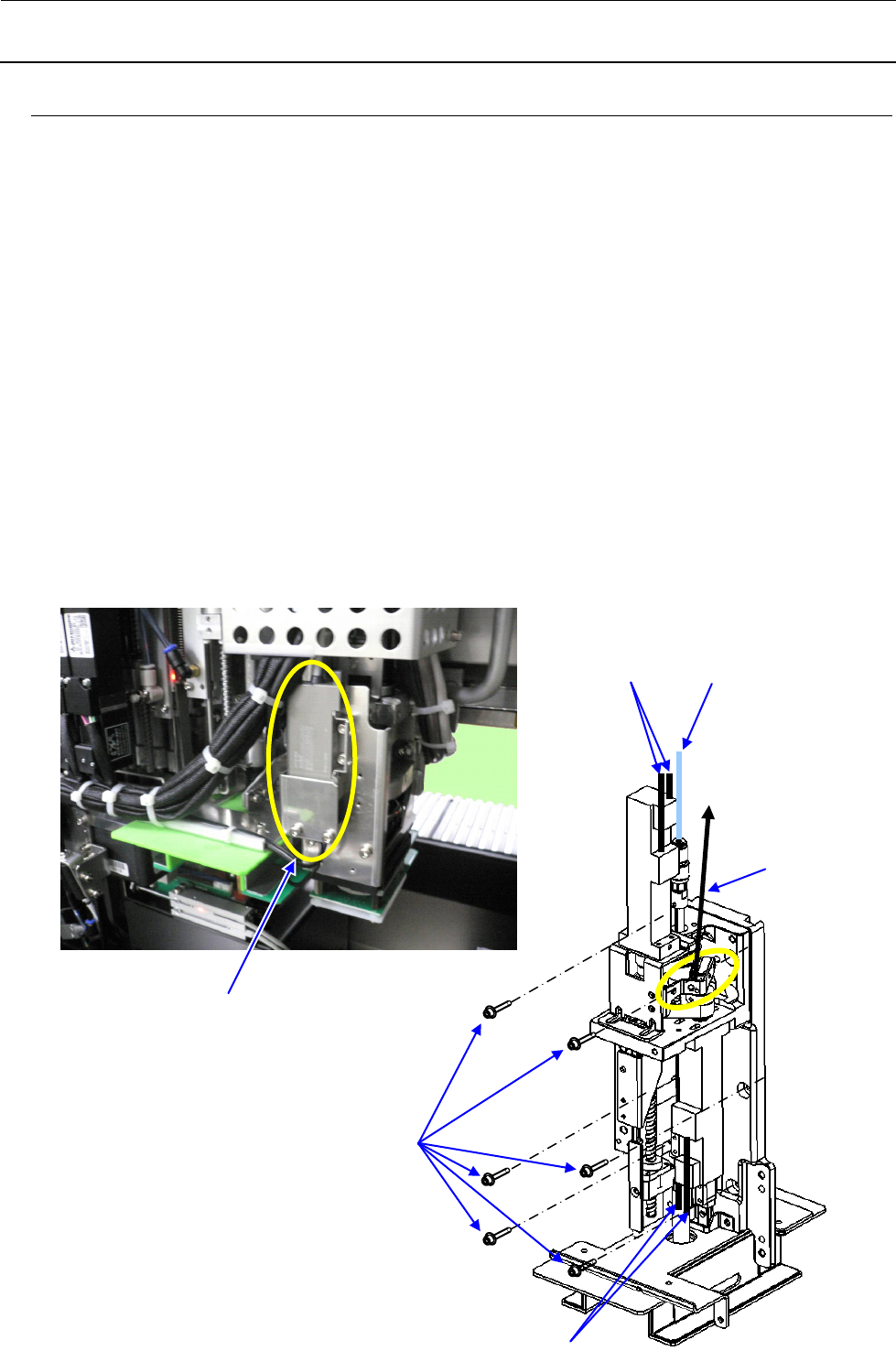
2-1-3.
IC 贴装头(KE-3020VRA)
1) 从伺服放大器基板上拆下 Z、θ 马达线束。(2-1-1 章之 7)项的第 4 段的全部连接器)
2) 从贴装头主基板上拆下 T 传感器线束①。(CN27)
3) 从 FMLA 传感器上拔下 LA 连接电缆的插头②(3 处)。
4) 卸下 φ4 空气管。(参照 2-1-2 项)
5) 卸下释放闩。(参照 2-5 项)
6) 请用手压住 IC 贴装头以防其掉下,同时拆下 M5×20 带垫片螺丝(6 个)③、M3×6 有头螺钉(1
个)④、M4×8 带垫片螺丝(1 个)⑤。
7) 将 IC 贴装头抬起,不要碰到其他元件。
(注意不要碰到 FMLA 和 LNC 贴装头的释放杆)
8) 装配请按相反的步骤进行。
※ 装配时请对 IC 贴装头安装螺丝(6 个)涂敷 LOCTITE242 粘结剂,以安装扭矩 7.0Nm 进行固定。
9) 更换贴装头后,需要重新输入 MS 参数。
输入项目请参照 2-8 项。
④
② (身前和内部2处)
② 与左面的身前相连
⑤
M5×20带垫片螺丝(6个 )③
θ马达线束
Z马达线束
φ4空气管
贴装头主基板
往(CN27)
T传感器线束①
维修调整要领书
2-6
图 2-2-1-1 Z电动机组装部(俯视图)
图 2-2-1-2 同步皮带 Z
2-2.
马达的更换
2-2-1.
Z 马达的更换(LNC60 贴装头)
更换了Z马达之后,需要进行Z轴原点的位置调整,以及 Z 轴高度有关、激光有关的 MS 参数。
(输入项目请参照 2-8 项。)
1) 从伺服放大器基板上拆下马达线束。
2) 实施到到 2-1-1 的第 1)~第 6)步,拆下贴装
头阀托架。
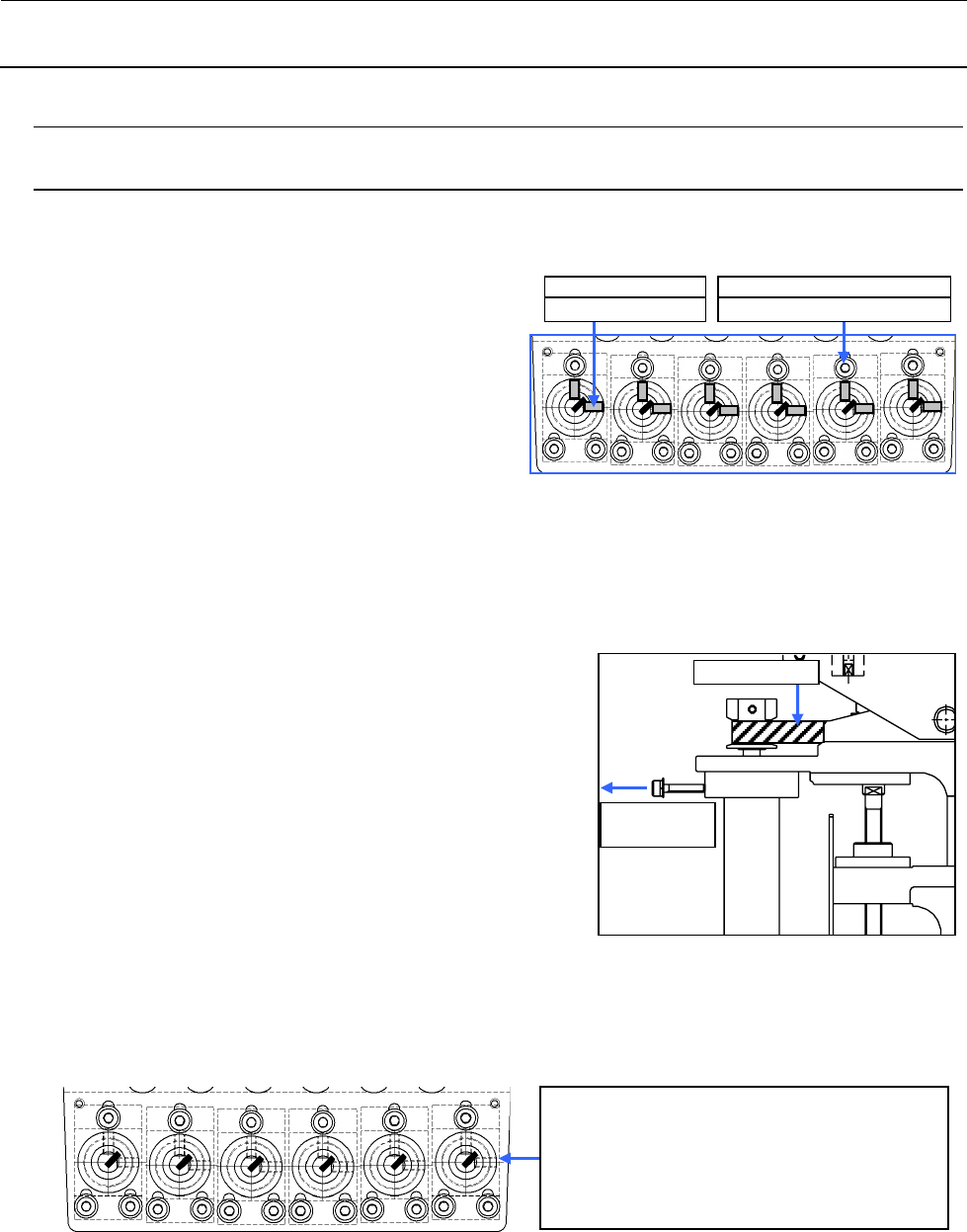
3) 先松开 Z 马达皮带轮的止动螺钉①。
4) 拆下马达的安装螺钉②(3 个),拔出皮带轮同
时卸下马达。
5) 装配请按相反的步骤进行。
6) 请按以下步骤调整皮带张力。
<皮带张力调整步骤>
① 把螺丝插到 Z 马达的螺丝孔,朝箭头方向用杆张力 21.6N
(2.2kgf)的拉力,用安装螺丝固定。
张力计设置值(设计值)
• 张力计输入值
Weight:0.9g/m、Width:8.0mm、Span:45mm
• 合适张力: 10.5±1N
※ 在 Z 马达安装螺丝(3 个)上涂上锁定漆 242 后,拧紧
固定,转矩为 2.3N m。
※ 固定 Z 马达皮带轮的固定螺丝时,应注意 Z 马达轴的平部和皮带轮固定螺丝的方向。固定螺丝的
紧固转矩为 0.5N m。
图 2-2-1-3 Z 电动机皮带轮的组装方法
② 组装后,请获取 MS 参数的基板上面高度。
①SM8030312TP
止动螺钉 M3 L=3
②SL6031692TN
带垫片内六角螺栓 M3×16
同步皮带 Z
21.6N (2.2kgf)
拉
在将 Z 轴抬到最上面的状态下,如果按左图
所示,在轴标记为 2 点钟方向的位置或者轴
的 D 形切面为图示的位置时将 Z 马达皮带轮
固定,即达到 2)项的条件。