JM-10_EPU使用说明书.pdf - 第118页
EPU 使用说明书 第 4 章 制作生产程序 4- 72 元件种类 测定位置 测定高度 BGA レーザ測定位置 部品高さ t -0.86t - 0.86×t 网络电阻 レーザ測定位置 部品高さ t -- 2 t 与圆筒形芯 片相同 微调电容器 - (t - 0.7) 单向引脚连接器 双向引脚连接器 Z 形引脚连接器 - 0.5× t J 引脚插座 レーザ測定位置 部品高さ t 0 0 鸥翼式插座 レーザ測定位置 部品高さ t 0 0 带…
EPU 使用说明书 第 4 章 制作生产程序
4-71
元件种类
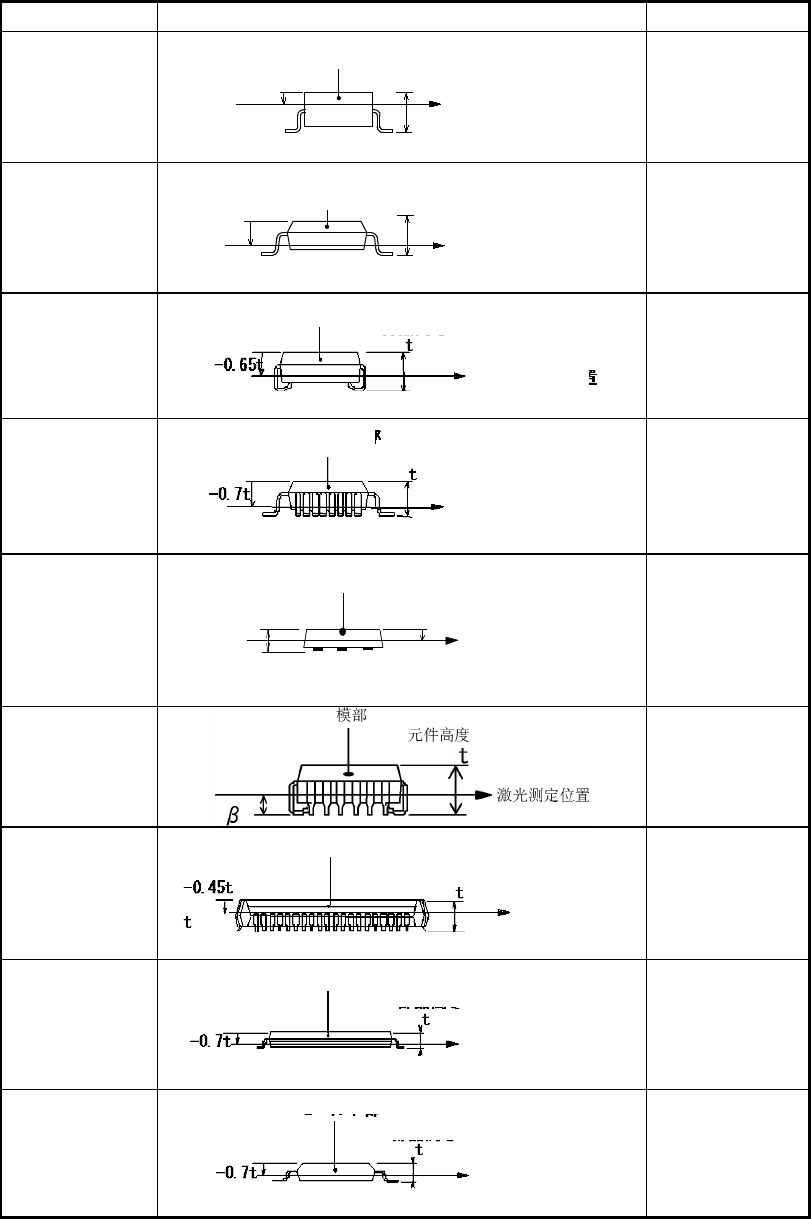
测定位置
测定高度
SOT
レーザ測定位置
モールド部
部品高さ
t
-γ
-r
r=0.25
SOP
HSOP
レーザ測定位置
モールド部
部品高さ
t
-0.7t
-0.7×t
SOJ
-0.65×t
QFP
-0.7×t
QFN
レーザ測定位置
モールド部
部品高さ
t
-0
.5t
-0.5×t
QFJ(PLCC)
-(t - β)
β = 0.4
PQFP(BQFP)
-0.45×t
TSOP
-0.7×t
TSOP2
-0.7×t
(继续)
元件高度
激光测定位置
元件高度
激光测定位置
元件高度
激光测定位置
模部
模部
模部
元件高度
激光测定位置
激光测定位置
模部
激光测定位置
模部
元件高度
激光测定位置
模部
元件高度
元件高度
激光
测定位置
元件高度
模部
模部
EPU 使用说明书 第 4 章 制作生产程序
4-72
元件种类
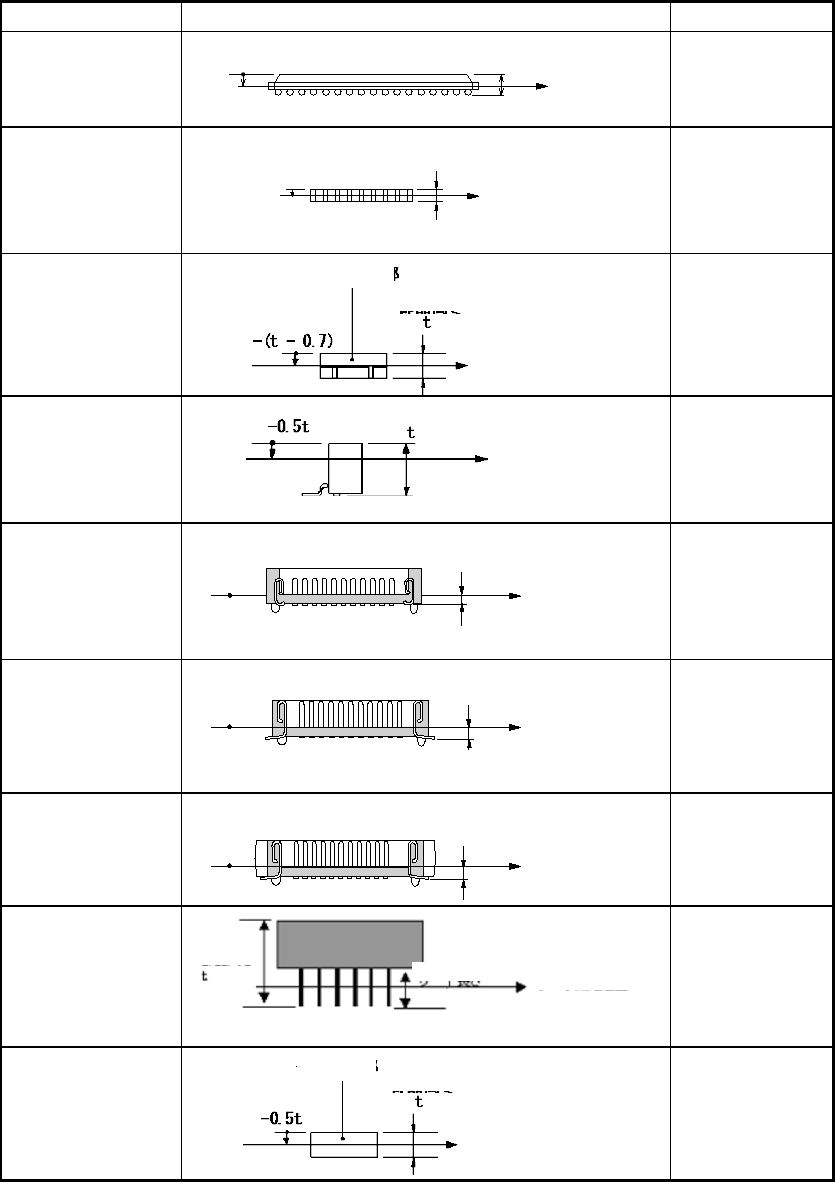
测定位置
测定高度
BGA
レーザ測定位置
部品高さ
t
-0.86t
-0.86×t
网络电阻
レーザ測定位置
部品高さ
t
--
2
t
与圆筒形芯
片相同
微调电容器
- (t - 0.7)
单向引脚连接器
双向引脚连接器
Z 形引脚连接器
- 0.5×t
J 引脚插座
レーザ測定位置
部品高さ
t
0
0
鸥翼式插座
レーザ測定位置
部品高さ
t
0
0
带减震器的插座
レーザ測定位置
部品高さ
t
0
0
插入元件
- (t - 1)
其它元件
-0.5×t
元件高度
激光测定位置
元件高度
元件高度
模部
激光测定位置
激光测定位置
激光测定位置
元件高度
激光测定位置
模部
元件高度
元件高度
激光测定位置
引脚长度
元件高度
激光测定位置
激光测定位置
激光测定位置
元件高度
元件高度
元件高度
EPU 使用说明书 第 4 章 制作生产程序
4-73
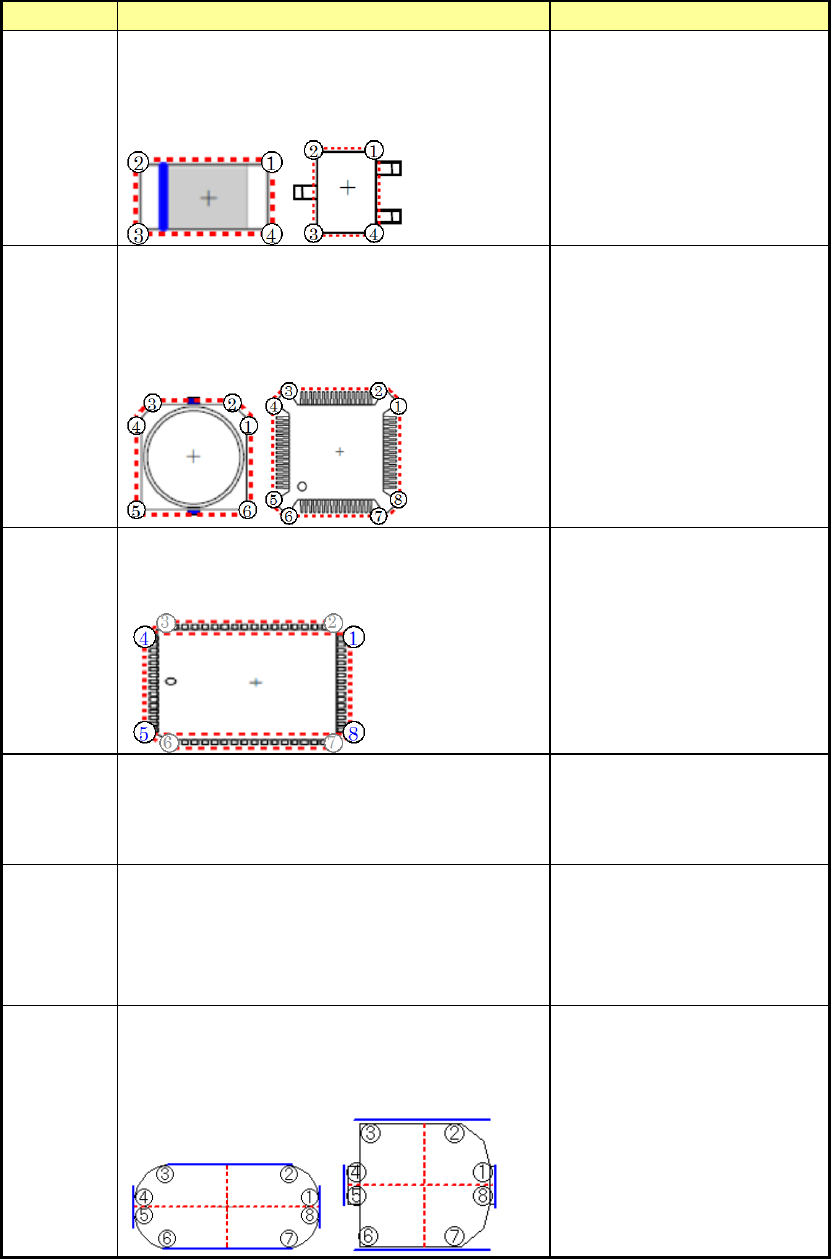
5) 元件形状
可以指定供激光识别用的元件形状。主要用途如下:
表 4-1-5-2-5 元件形状
元件形状
动 作
用途
无缺角
根据测量数据检测出 4 个顶点,进行位置偏
差、角度偏差的计算、校正,并进行贴片。
对于无缺角,近似四边形形状的元件,可设置
此种元件形状。
芯片、圆筒形芯片、
SOT
、
QFN、微调电器、单向连接
器、双向连接器、Z 引脚连
接器、其他元件
有缺角
根据测量数据检测出
5
~
8
个顶点,进行位置
偏差、角度偏差的计算、校正,并进行贴片。
元件中只要有 1 个缺角,以及 QFP 等在激光
测量位置有引脚的元件,可设置此种元件形
状。
铝电解电容、
GaAsFET
、
SOP、HSOP、SOJ、QFP
、
FQFP(BQFP) 、 TSOP 、
TSOP2、BGA、网络电阻、
J 引脚插座、单向连接器、鸥
翼式插座、带减震器的插座
PLCC
根据测量数据检测出
8
个顶点,使用其中
4
个点进行位置偏差、角度偏差的计算、校正,
并进行贴片。是 PLCC 专用的元件形状。
PLCC
圆筒
根据测量数据进行位置偏差、角度偏差的计
算、校正,并进行贴片。
用于没有角的圆筒元件等。
在此种情况下,忽略角度(忽
略极性),仅求得元件的中
心。
不设置
根据吸取姿势按贴片角度转动并贴片。 用于激光定中心不稳定的元
件 ( 超出规格的极薄的元
件)。此时不进行定中心而直
接进行贴片。因此贴片位置
受吸取位置影响。
灵活
从测量数据中抽出在
X
、
Y
方向上能构成元件
幅度最小的附近 8
个点,计算·校正位置偏差、
角度偏差后,进行贴片。
用于「无缺角」、「有缺角」
、
「PLCC」等构成激光识别错
误 93(形状识别错误)的多
角形元件等。
与其他元件形状比使用数据
量少,因此精度稍差,但可
以测量更多种类的元件。