KE2030取扱説明書Ver.2.01,和文Rev.09.pdf - 第42页
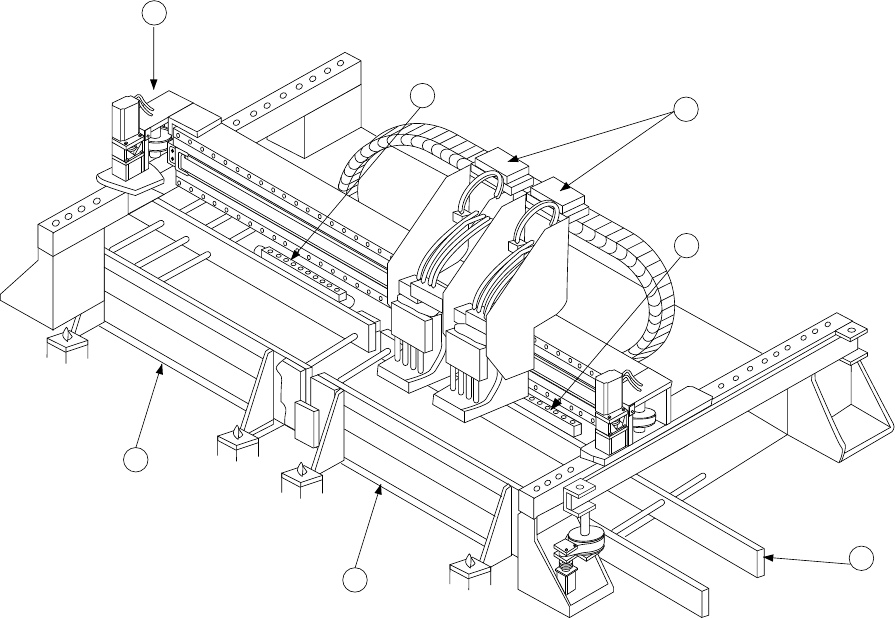
1 - 22 3 1 5 4 1 2 5 図 図 図 図 1-2-1-3 ① AT C ユニット ④基板搬送ユニット ②ヘッドユニット ⑤フィーダバンクユニット ③ X-Y ユニット
1 - 21
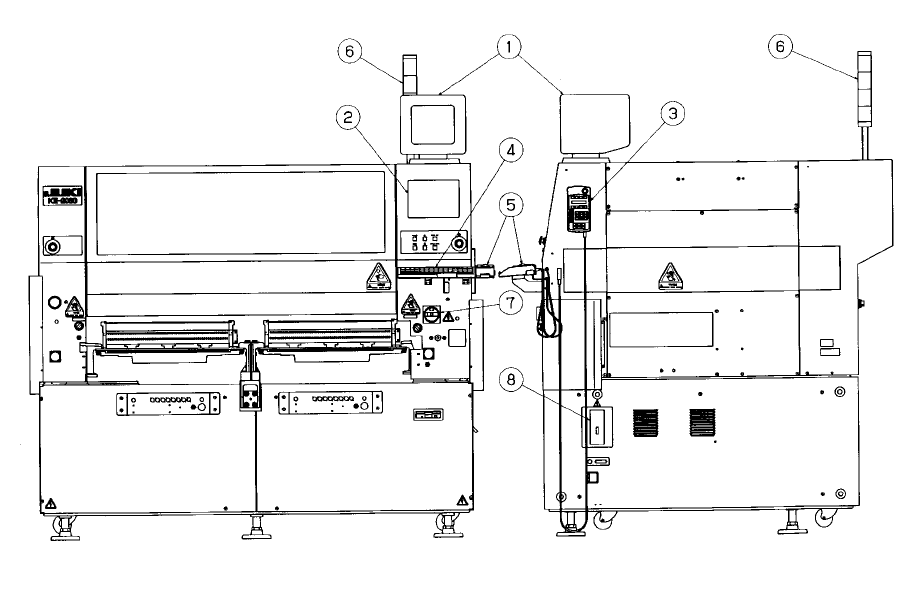
1-2. 基本構成及び各部の名称
基本構成及び各部の名称基本構成及び各部の名称
基本構成及び各部の名称
1-2-1.
全体図
全体図全体図
全体図
図
図図
図
1-2-1-1
正面図
正面図正面図
正面図
図
図図
図
1-2-1-2
右側面図
右側面図右側面図
右側面図
①
ビジョンモニタ
⑤
トラックボール
②
液晶ディスプレイ
⑥
シグナルライト
③
HOD
ユニット
⑦
メインスイッチ
④
キーボード
⑧
ノーヒューズブレーカ
1 - 22
3
1
5
4
1
2
5
図
図図
図
1-2-1-3
①
ATC
ユニット
④基板搬送ユニット
②ヘッドユニット
⑤フィーダバンクユニット
③
X-Y
ユニット
1 - 23
1-2-2.
基板搬送部の機構及び各部の名称
基板搬送部の機構及び各部の名称基板搬送部の機構及び各部の名称
基板搬送部の機構及び各部の名称
1.
ピン基準の場合
1)
1枚目の基板が搬入されると,
IN
センサ①が基板を検出。
2)
INモータ④を駆動し,搬送開始。
3)
ウェイトセンサ③が基板を検知しますと,出口側ストッパ
24
をON,C
.
基板チャックセンサ
32
・S
.
基板チェックセンサ
33
をOFFします。
4)
出口側ストップセンサ⑲が基板を検出しますと,搬送を停止し,出口側
BU
プレート
28
を上
昇させ,出口側センタリングピン
27
とで位置決め固定します。
5)
2枚目の基板は,ウェイトセンサ③で待機。
6)
1枚目の基板が入口側C
.
OUTセンサ⑦を検知しますと,入口側ストッパ⑪をONします。
7)
2枚目の基板を入り口側センターモータ⑧を駆動し,搬出開始。
8)
入口側ストップセンサ⑥が基板検出しますと,搬送を停止し,入口側BUテーブル⑮を上昇さ
せ,入口側センタリングピン⑭とで位置決め固定します。
9)
3枚目の基板は,ウェイトセンサ③で待機。
2.
外形基準の場合
搬入動作はピン基準と同じですが,固定時に基板の外形を入口側Xプッシャ⑫,入口側Yプッシャ
⑬及び,出口側Xプッシャ
25
,出口側Yプッシャ
26
により固定します。
搬出動作はピン基準と同じです。