Q170226E01 中文版.pdf - 第266页
rh5 服务手册 7.1NC单元调整 7.1 − 5 5 da3s ec − 84 − 290 − a0 7.1 .4 手动 模式 移 动检 查在 手 动模 式 (1) 手动移动教学检查 在手动模式下 (1步, 连续)。 移动 时,检 查表停止在+和 − 限制。 (2) 手动模式原点返回 检查 表原点监视表原点信号 脉冲发生器A相脉冲发生 器B相 脉冲发生器C相 0 1 230阶段12 3 0 何时转为《特定常规武器公约 =检查= 图7…

rh5
服务手册
7.1NC单元调整
da3sec−84−290−a0
7.1
−
4
4
7.1.3
交流电机电源打开
(1) 打开电源,但确保安全开关保持关闭。
=检查=
在这种状态下,随时保持手上的紧急停止。 如果X−Y或Z表开始移动,立即关闭电源。
(2) 检查每个桌子是否锁定在位置(Servolock)。
此位置存储在NC单元中。 如果表有些移动,它将立即回到原来的位置。
=检查=
在这种状态下,尝试移动表。 如果太弱,无法返回位置,或者如果电机转动,但桌子不动,逐渐提
高电机干燥器的速度回路增益(Cn−04),在1到5范围内。
如果表在返回位置时过度抖动,则在1到5范围内逐渐降低上述速度回路增益(C4−04。
如果证明无效,检查接线,交流电机驱动器和数控板。
(3) 联锁激活检查
转动X、Y和Z轴上的安全开关(限位开关。 (只有当传感器打开时,“P−OT”和“N−OT”交替显示
在电机驱动器监视器上。
试着推每一张桌子,检查它们不容易移动。 当联锁启动时,即使桌子移动,你移除你的手,它也
不会回到位置上。
=检查=
若要释放联锁,请打开SERVOLOCK释放开关,并将表大致返回到中心位置。 然后,按操作复
位开关,然后再按
服务器释放开关。
rh5
服务手册
7.1NC单元调整
7.1
−
5
5
da3sec−84−290−a0
7.1.4
手动模式移动检查在手动模式
(1) 手动移动教学检查在手动模式下(1步,连续)。 移动时,检查表停止在+和−限制。
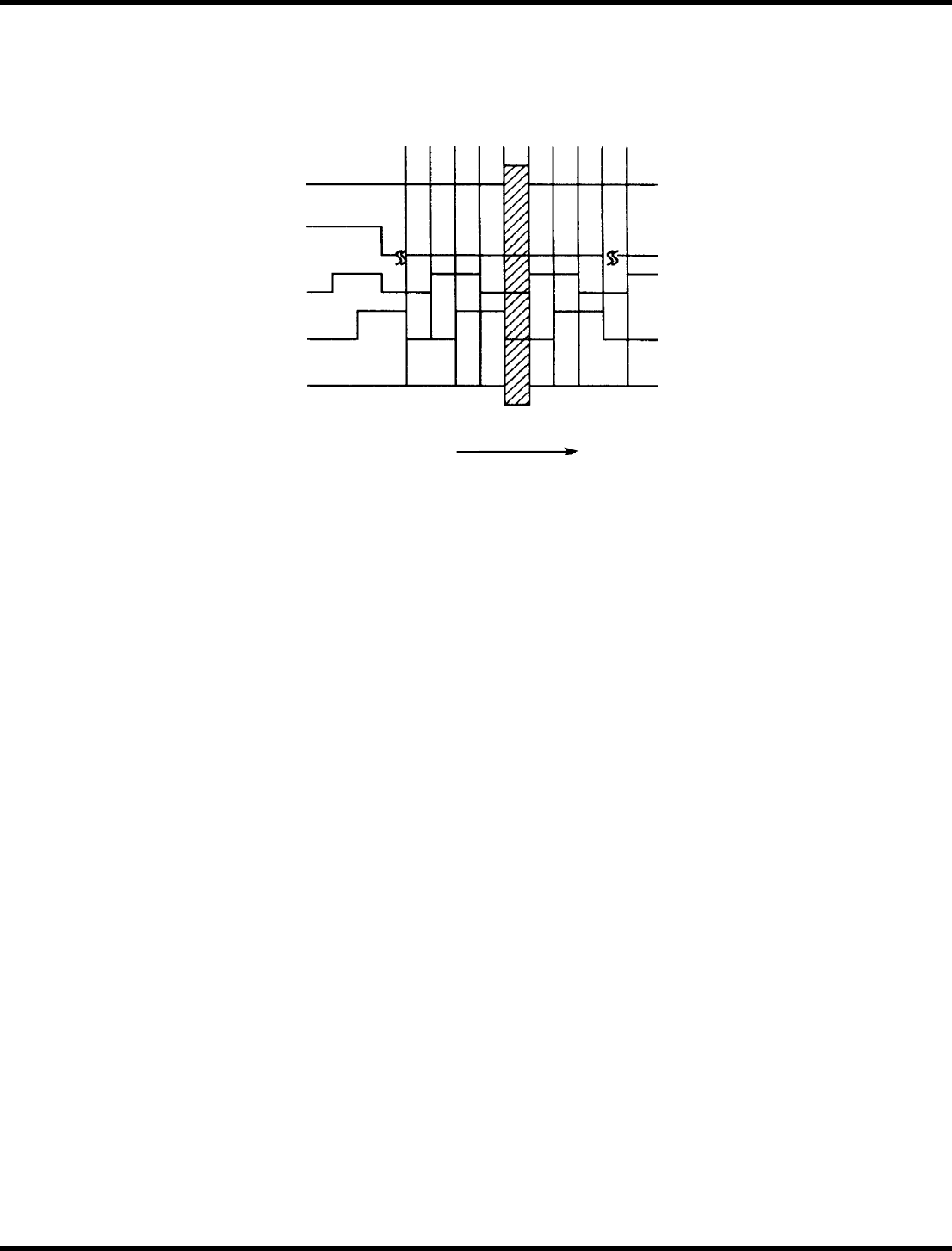
(2) 手动模式原点返回检查
表原点监视表原点信号
脉冲发生器A相脉冲发生
器B相
脉冲发生器C相
0 1 230阶段12 3 0
何时转为《特定常规武器公约
=检查=
图7.1−5−
•
当按下X−Y−ZORG开关时,所有三个轴都返回各自的起源。
•
当表回到它们的原点时,检查表原点信号和原点慢信号是否在表原点监视器的中心。
•
每次监视器旋转一次,就会产生Z相信号。
rh5
服务手册
7.1NC单元调整
da3sec−84−290−a0
7.1
−
4
6
六,八
n2
n4
0
N1,N3,N5,N7,
N9−N14
7.1.5
半−自动模式运动检查
(1) 输入下面指示的程序数据。
n1
/0
g1
莫
t0
x−0
你−0
z−0
n2
/1
M1
t0
x−10000
z1
n3
/1
M1
t0
x10000
z1
n4
/1
M1
t0
x−10000
z1
n5
/1
M1
t0
x10000
z1
n6
/2
M1
t0
你
−20000
z1
n7
/2
M1
t0
2000年
z1
n8
/2
M1
t0
你
−20000
z1
N9
/2
M1
t0
2000年
z1
n10
/3
M1
t0
z30
n11
/3
M1
t0
z1
n12
/3
M1
t0
z30
n13
/3
莫
t0
z30
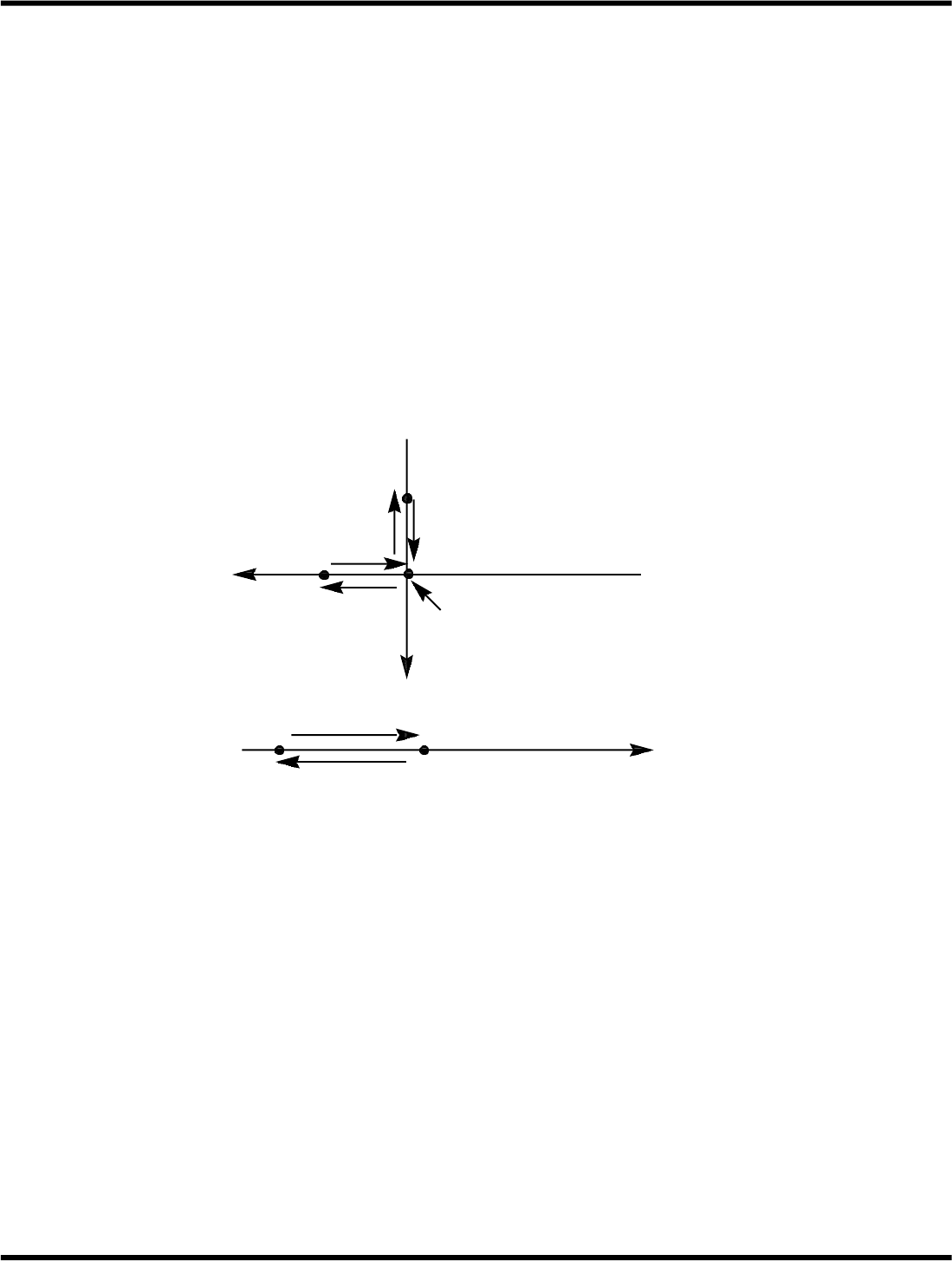
你+
Z+(向右流动)
第一−第九,第十一,第十三
利用数据在半−自动模式下进行定位。
0
n10,n12