Q170226E01 中文版.pdf - 第400页
rh5 服务手册 8.9测量皮带张 力 8.9 − 3 5 da3s ec − 85 − 210 − a0 测量中心部 分。 腰 带 8.9 .3 Z轴 驱动 程序
rh5
服务手册
8.9测量皮带张力
da3sec−85−210−a0
8.9
−
4
4
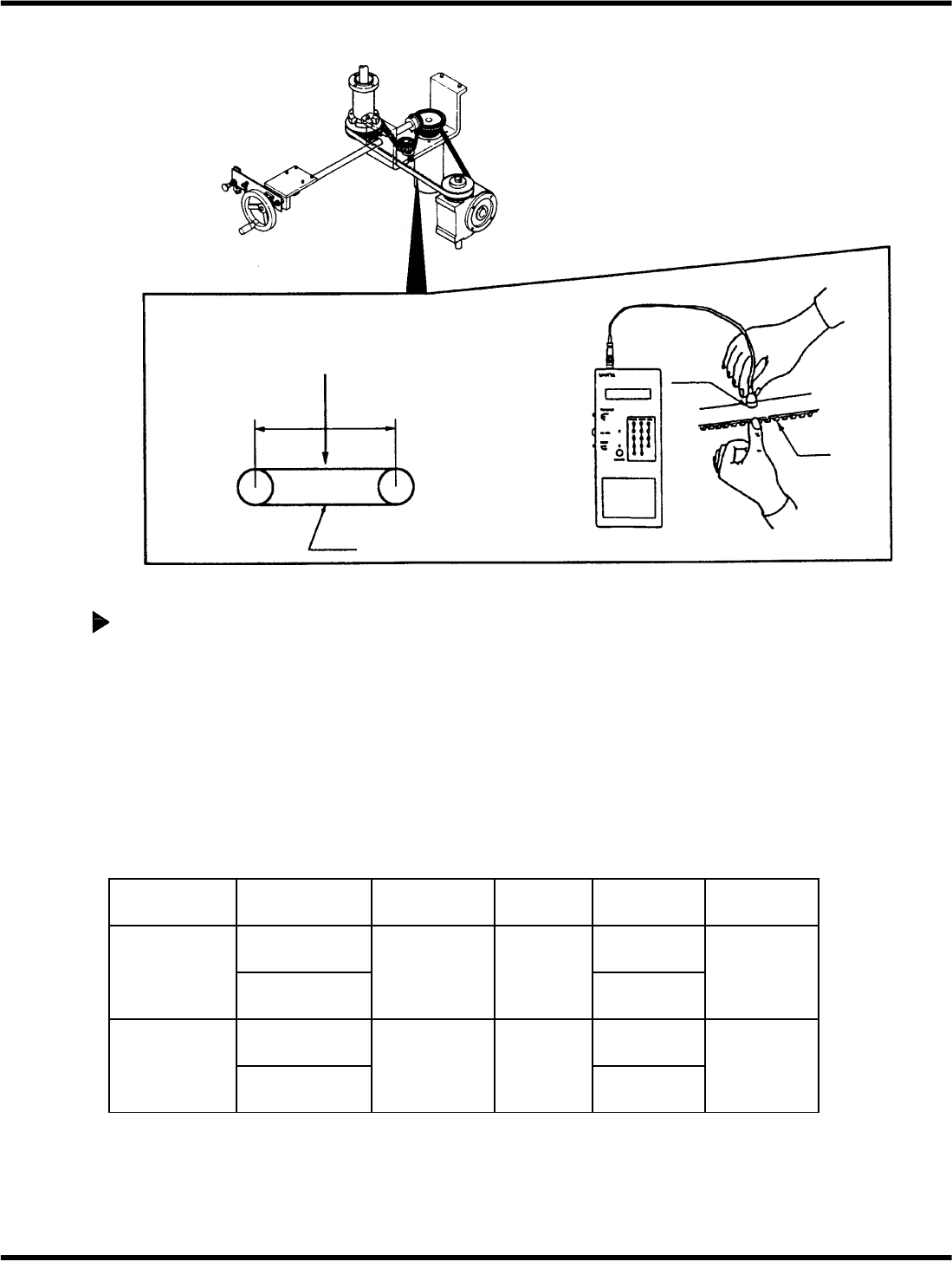
测量中心部分。
微型−
电话
腰
带
腰
带
程序
1.
测量位置应在皮带最长部分的中心。
2.
有关测量的细节,请遵循5.14.1中描述的程序。
=参考=
•
如果测量前MICGain灯(4)闪烁,则关闭控制体积(5)
•
测量时不要让皮带干扰麦克风。
•
在装配阶段设置皮带张力大于公差值,并在将皮带翻转一次后,对皮带进行均匀拉伸。 然后在24小
时内进行重新测量,以解决公差值内的张力值。 (装配阶段下的皮带可以保证拉伸。 )
皮带张力参数表
单
位
类型
体重
宽度
斯潘
宽容
主传动单元
(上)
nm−8244a/b/c
0.38(克/厘米
2
)
25
337(毫
米)
19.5(公
斤)
nm−8245a/b/c
538(毫
米)
主传动单元
(下)
nm−8244a/b/c
0.38(克/厘米
2
)
25
448(毫
米)
19.5(公
斤)
nm−8245a/b/c
650(毫
米)
rh5
服务手册
8.9测量皮带张力
8.9
−
3
5
da3sec−85−210−a0
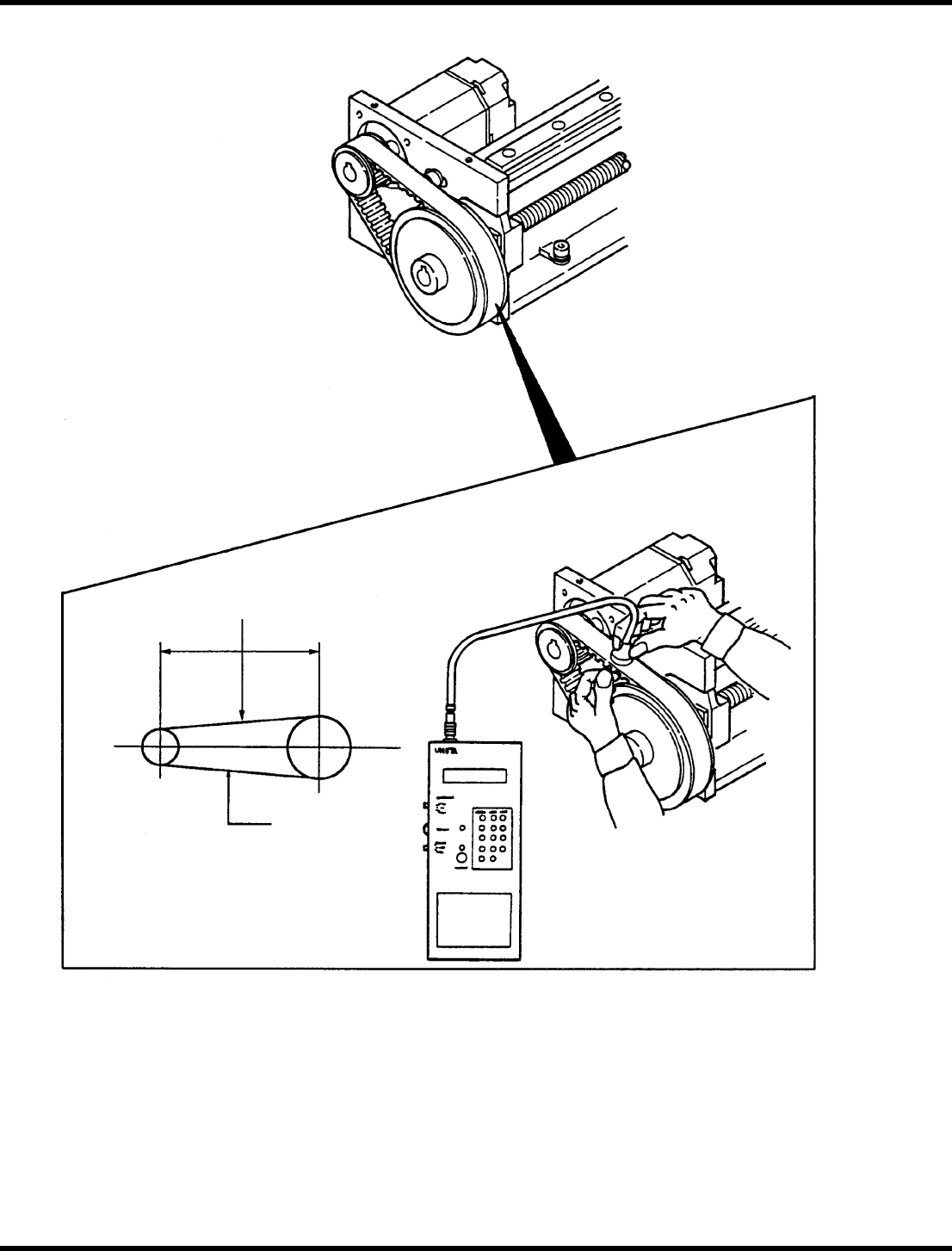
测量中心部分。
腰
带
8.9.3
Z轴驱动程序
rh5
服务手册
8.9测量皮带张力
da3sec−85−210−a0
8.9
−
4
6
程序
1.
测量详见8.9.1声波拉力计。
=发言
•
如果测量前MICGain灯(4)闪烁,则关闭控制体积(5)
•
测量时不要让皮带干扰麦克风。
•
在装配阶段设置皮带张力大于公差值,并在将皮带翻转一次后,对皮带进行均匀拉伸。 然后在24小
时内进行重新测量,以解决公差值内的张力值。 (装配阶段下的皮带可以保证拉伸。 )
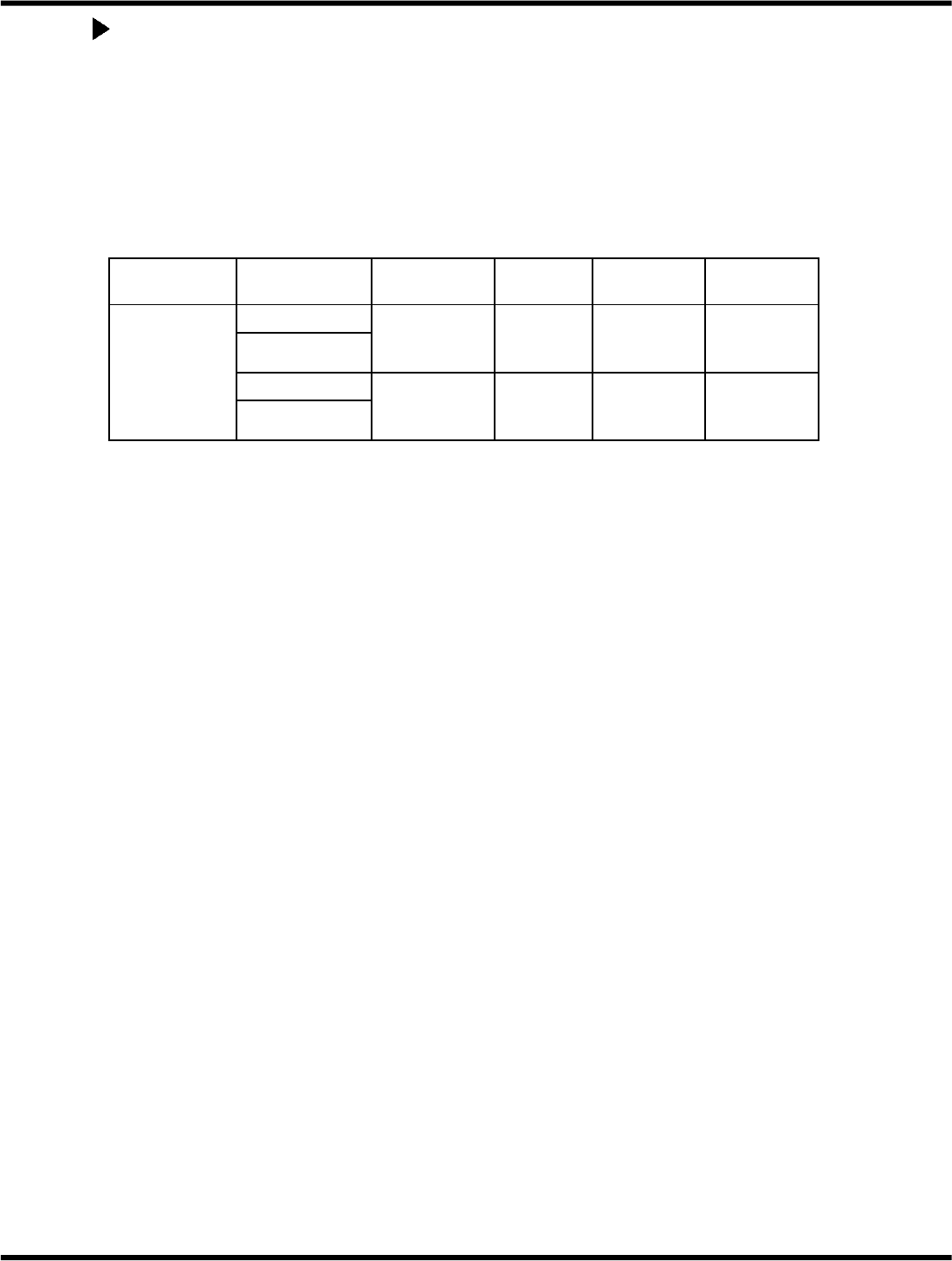
皮带张力参数表
单
位
类型
体重
宽度
斯潘
宽容
Z轴驱动器
nm−8244c
0.38(克/厘米
2
)
25
232(毫
米)
19.5(公
斤)
nm−8245c
nm−8244a/b
0.38(克/厘米
2
)
25
149(毫
米)
19.5(公
斤)
nm−8245a/b