Q170226E01 中文版.pdf - 第288页
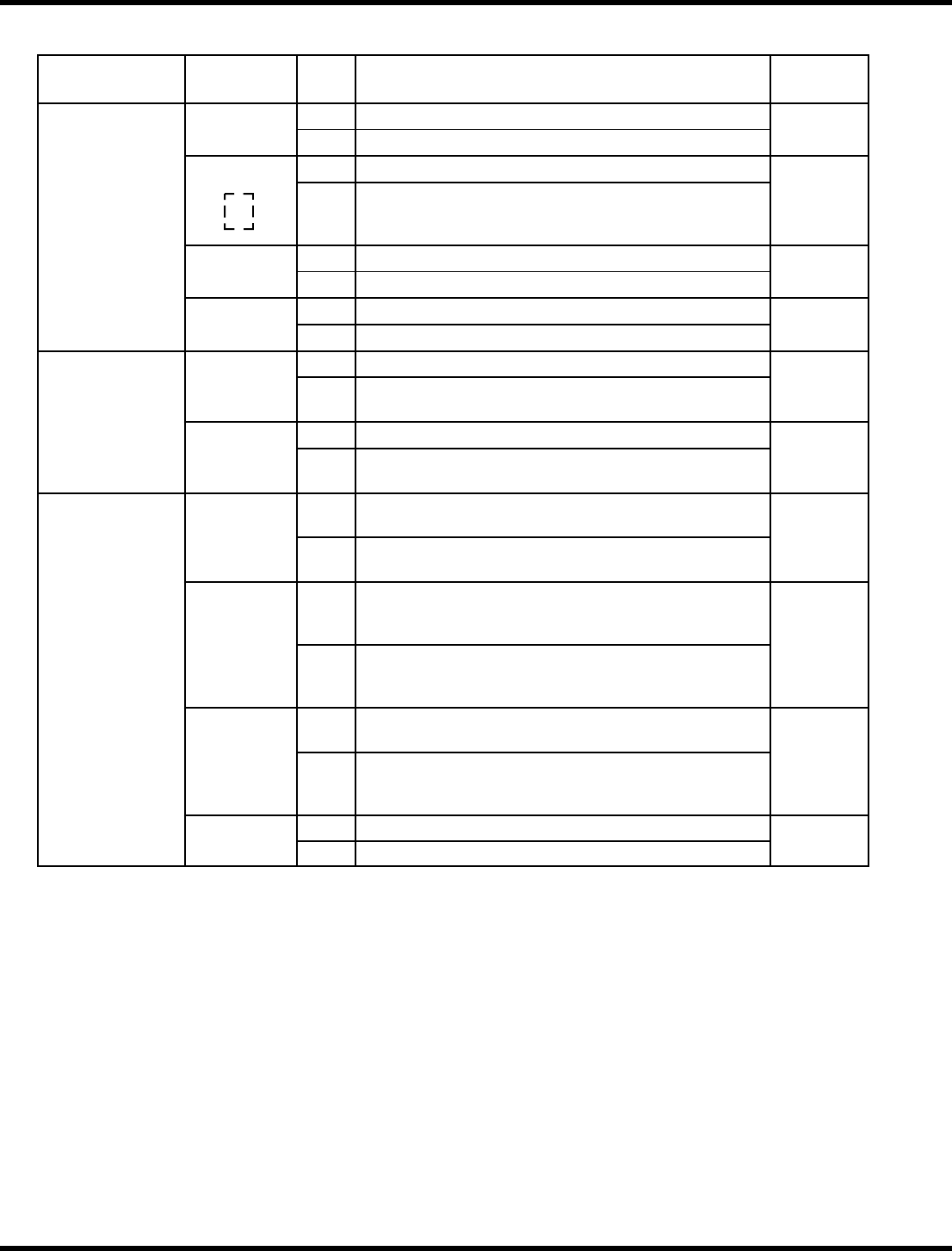
rh5 服务手册 7.2交流伺服电 机调整 用户常量 Cn − 01(内存开关 )列表 7.2 − 19 19 da3s ec − 84 − 300 − a0 选定项目 位号。 − 错 说明 参考资料 顺序输入 0 0 通过外部输入打开/关闭伺服(SV − ON) 0 1 正常情况下。 1 只有SRBY 0 使用外部输入(SEN)。 0 1 无论SEN信号是否输入,都要将交流电机视为伺服包内的高 速自动。 2 0 通过P − OT信号在…
rh5
服务手册
7.2交流伺服电机调整
da3sec−84−300−a0
7.2
−
10
18
7.2.5
设置/浏览用户常量(内存开关)(Cn−01和Cn−02)
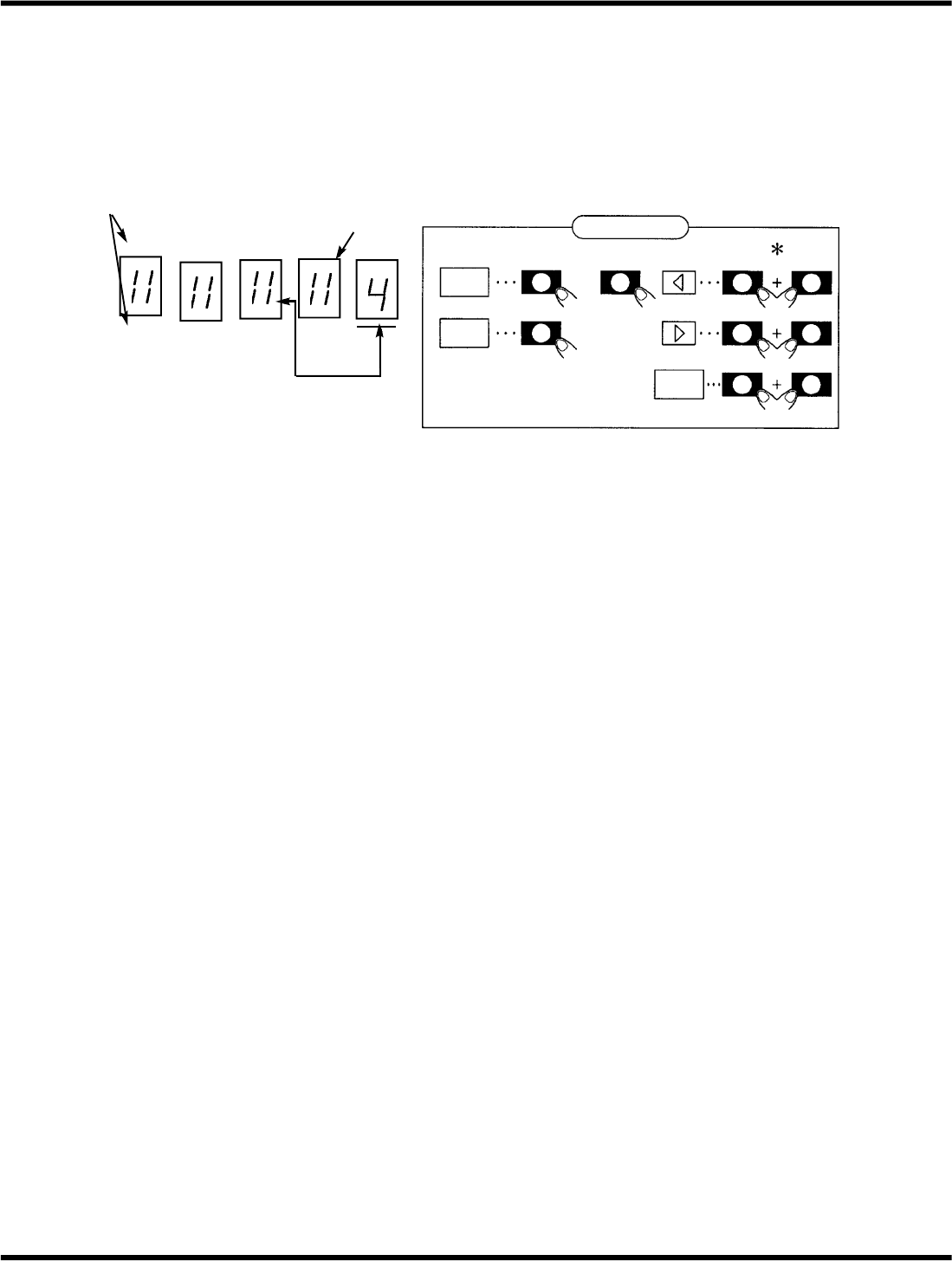
用户常量Cn−01和Cn−02可以由位设置或浏览作为内存开关。 图7.2−1显示了位数据显
示后交换机的功能。
若要更改Cn−01或Cn−02(用户常量),请打开控制电源以启用预置功能。
面板显示
位号。
a b
打开时点亮
f d b 9
不是。 准备好了
*显示SW2(SW3或SW4)应在按住SW1时按下。
图7.2−1−功能开关
1.
使用箭头键,设置位号。 将内存开关设置为面板的右端。
2.
使用“位”键,打开/关闭内存开关。 (允许使用SW2或SW3。) (灯开着就亮,关着就
熄灭。 )
3.
必要时重复步骤1和2。
4.
按“SET”存储数据。
5.
按“数据”返回屏幕。
6.
按“SET”切换到监视器模式。
下面描述用户常量Cn−01和Cn−02的内存开关的功能。
开关功能
sw2
sw1
sw3
比
特
或
者
sw4
sw1
sw3
准备
好了
sw1 sw3
数据
e c
6 4 2 0
7 5 3 1
rh5
服务手册
7.2交流伺服电机调整
用户常量Cn
−
01(内存开关)列表
7.2
−
19
19
da3sec−84−300−a0
选定项目
位号。
−
错
说明
参考资料
顺序输入
0
0
通过外部输入打开/关闭伺服(SV−ON)
0
1
正常情况下。
1
只有SRBY
0
使用外部输入(SEN)。
0
1
无论SEN信号是否输入,都要将交流电机视为伺服包内的高
速自动。
2
0
通过P−OT信号在正常旋转中禁用驾驶。
0
1
使驾驶正常旋转。
3
0
通过N−OT信号禁用反向旋转驱动。
0
1
使驾驶在反向旋转正常。
输入信号
4
0
用于−输入。
0
1
将−A中的“0”作为Sevo包中的“0”,而不管IN−A信号是否
被输入。
5
0
用于−B输入。
0
1
将−B中的“0”作为Sevo包中的“0”,而不管是否输入。
异常停止
6
0
<DB停止>
施加动态制动,使电机停止。
0
1
<自由运行停止>
停止电机在自由运行模式。
7
0
应用DB>后<DB OFF
即使在电机停止后也释放动态制动。
0
1
应用DB>后<DBON
即使在电机停止后也应用动态制动。
8
0
遵循与位号相同的程序。 在过度旅行时停车。
0
1
<零速度停止在过度旅行>
应用电机停止与扭矩设置在用户常数Cn−06在过度旅行。
9
0
在过度旅行时,BB在零停止后应用
0
1
在过度旅行时,在零停止后执行零夹钳。
rh5
服务手册
7.2交流伺服电机调整
da3sec−84−300−a0
7.2
−
20
20
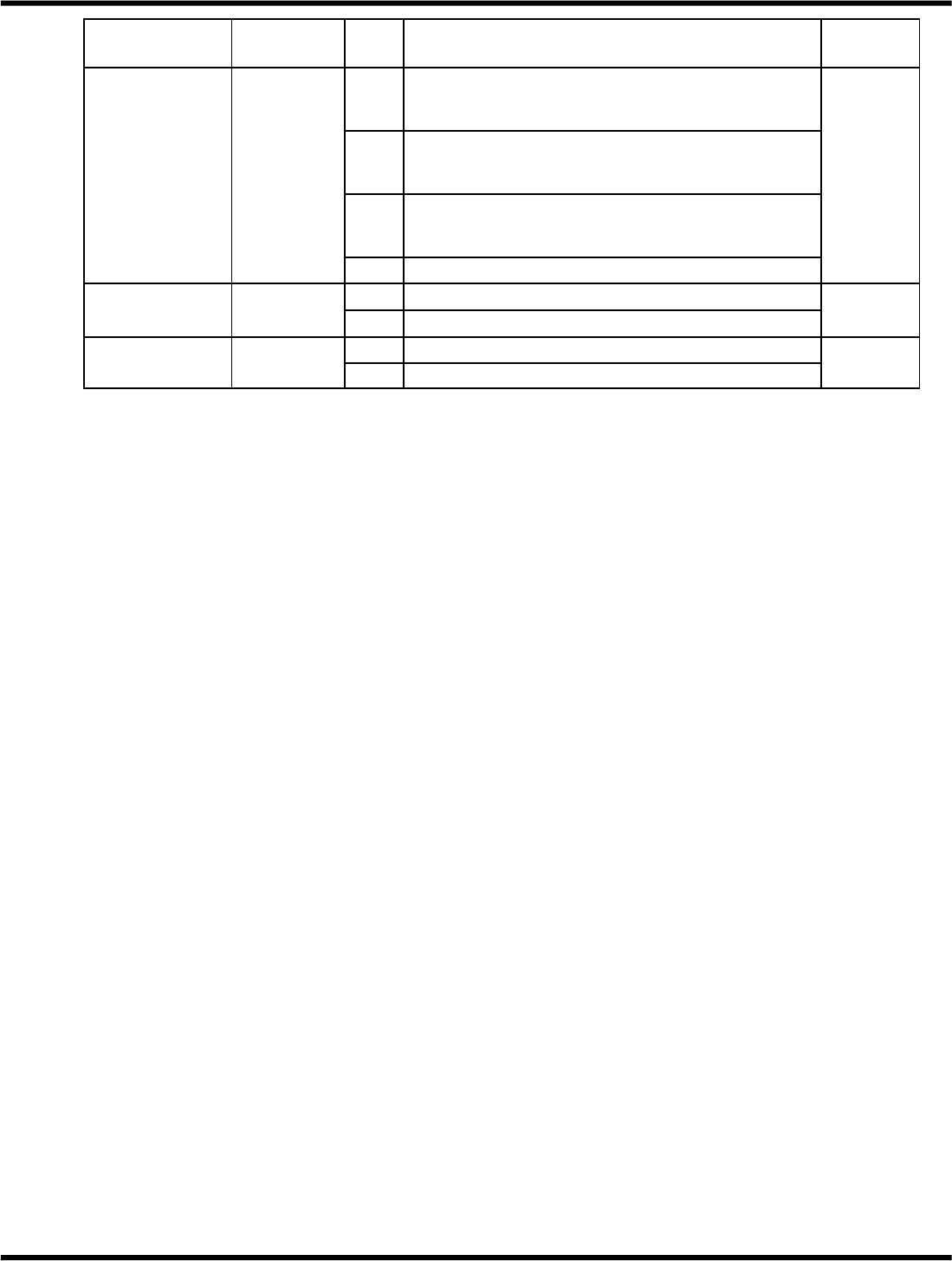
选定项目
位号。
−
错
说明
参考资料
模式开关(只有速
度控制)
d/c
0/0
<扭矩命令>
当设定的扭矩阀符合用户常数Cn−0C时,它可以被激活。
00
0/1
<速度指挥>
当设置值符合用户常量Cn−0C时,可以激活它。
1/0
<加速>
当设置值符合用户常量Cn−0E时,可以激活它。
1/1
模式切换功能不支持
外部刹车
e
0
无制动命令功能
0
1
支持制动命令功能
超载报警
f
0
无过载报警功能
0
1
支持过载报警功能
=参考=
•
位号。 8:遵循与位号相同的程序。 当控制扭矩时,用于异常停止。
•
位号。 09:选择完成零速度停止后选择0或1。
•
位号。 选择激活模式开关的条件。
当模式开关激活时,速度控制将切换到P控制。 然而,这仅用于控制速度。