F4000N_revD.pdf - 第19页
F4000N Series Operating Manual Section 3: T eaching Overview Part # 562187N - 1 Rev . D Sep 2012 18 © 20 12 Fisnar Inc. 3. Point T ype & Function Summary 3.1 Point Menu (F1) Below is a list of Point T ypes, which are…
F4000N Series Operating Manual
Section 3: Teaching Overview
Part # 562187N-1
Rev. D Sep 2012
17
© 2012 Fisnar Inc.
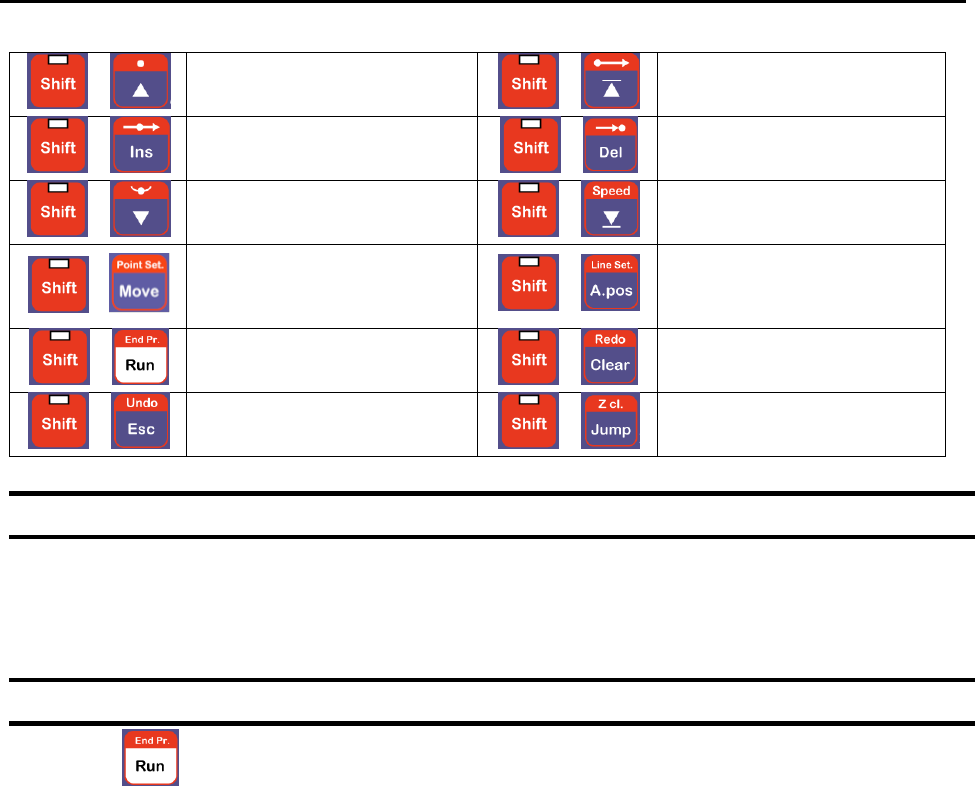
Key Functions
→
Registers a DISPENSE
DOT point.
→
Registers a LINE START
point.
→
Registers a LINE
PASSING point.
→
Registers a LINE END
point.
→
Registers an ARC POINT.
→
Registers a Line Speed
command.
→
Registers a Point
Dispense Setup
command.
→
Registers a Line Dispense
Setup command.
→
Registers the End
Program command.
→
Redo Last Entry
→
Undo Last Entry
→
Registers a Z Clearance
command.
2.3 Data Entry
When a number is required, the teach pendant will automatically switch to numeric entry
mode. The number represented by each key is shown in the lower right corner of the key.
2.4 Running a Program
Press the key to run the program.
F4000N Series Operating Manual
Section 3: Teaching Overview
Part # 562187N-1
Rev. D Sep 2012
18
© 2012 Fisnar Inc.
3. Point Type & Function Summary
3.1 Point Menu (F1)
Below is a list of Point Types, which are found under the F1 key (Point menu):
Function
Description
Dispense Dot
Registers the current XYZ location as a Dispense point for dot
dispensing.
Line Start
Registers the current XYZ location as a Line Start point for line
dispensing.
Line Passing
Registers the current XYZ location as a Line Passing point. This is a
location on the line where the tip changes direction, such as at the
corner on a rectangle.
Circle
Registers a circle with the circle center at the current XYZ location. The
display will prompt the user for the circle diameter.
Arc Point
Registers the current XYZ location as an Arc point. Arc points are used
to dispense material in an arc or circle.
Line End
Registers the current XYZ location as a Line End point.
End Program
Registers the current memory address as the end of the program.
Dispense On /
Off
Registers an instruction which turns the dispenser on or off at the
current XYZ location.
GOTO
Address
Causes the program to jump to the specified memory address.
Step & Repeat
Registers an instruction that will re-run a selected group of memory
addresses, stepping by a user-defined distance in the X or Y-axis after
each copy. The matrix of parts is defined by specifying the number of
rows, the number of columns, the X offset and the Y offset.
Step & Repeat X indicates that the robot will give priority to the X-axis,
running the parts along the X-axis first.
Step & Repeat Y indicates that the robot will give priority to the Y-axis,
running the parts along the Y-axis first.
Brush Area
Causes the tip to „paint‟ the defined area. The painted area can be in
the form of a rectangle or a circle / spiral.
Call
Subroutine
Causes the machine to jump to a specified memory address and
execute the instructions found there. When the end program instruction
is reached, program execution will continue at address just after the call
Subroutine instruction.
F4000N Series Operating Manual
Section 3: Teaching Overview
Part # 562187N-1
Rev. D Sep 2012
19
© 2012 Fisnar Inc.
Function
Description
Call Program
Jumps to the specified program number from within the current
program.
Set I/O
Registers an instruction, which either sets the value of an output signal
or checks the status of an input signal.
Wait Point
After executing the current point (Line start, passing, etc) the robot will
wait a specified amount of time before moving to the next command.
Stop Point
After executing the current point (Line start, passing, etc), the robot will
wait until the start button is pressed before moving to the next
command.
Home Point
Registers an instruction to „home‟ all axes, sending them to the home
position. See the Setup Menu for instructions on changing the location
of the home position.
Loop Address
Causes the program to execute a group of memory addresses a user-
specified number of times.
Dummy Point
Registers the current XYZ location as a Dummy point. The tip will
simply pass through this point. Useful for avoiding obstacles on the
work piece.
Initialize
Registers an Initialize point. Causes the robot to perform a mechanical
initialization.
Label
Registers a label that can be used as a reference when used with the
GOTO address, Loop address, Set I/O, Step & repeat X, Step & repeat
Y and Call Subroutine commands.
Display
Counter
Shows a counter at the bottom of the teach pendant screen while a
program is running.
Loop Counter
The Loop Counter either clears or keeps the current tally of the counter
when an I/O signal is received. The tally is cumulatively added to the
current count on the display counter.
Dispense
Output Setup
Defines the dispense output port number for line dispense setup.