F4000N_revD.pdf - 第87页
F4000N Series Operating Manual Section 5: Point T ype & Function Reference Part # 562187N - 1 Rev . D Sep 201 2 86 © 20 12 Fisnar Inc. 5.14 Acceleration Controls the acceleration of each a xis. The value entered in t…
F4000N Series Operating Manual
Section 5: Point Type & Function Reference
Part # 562187N-1
Rev. D Sep 2012
85
© 2012 Fisnar Inc.
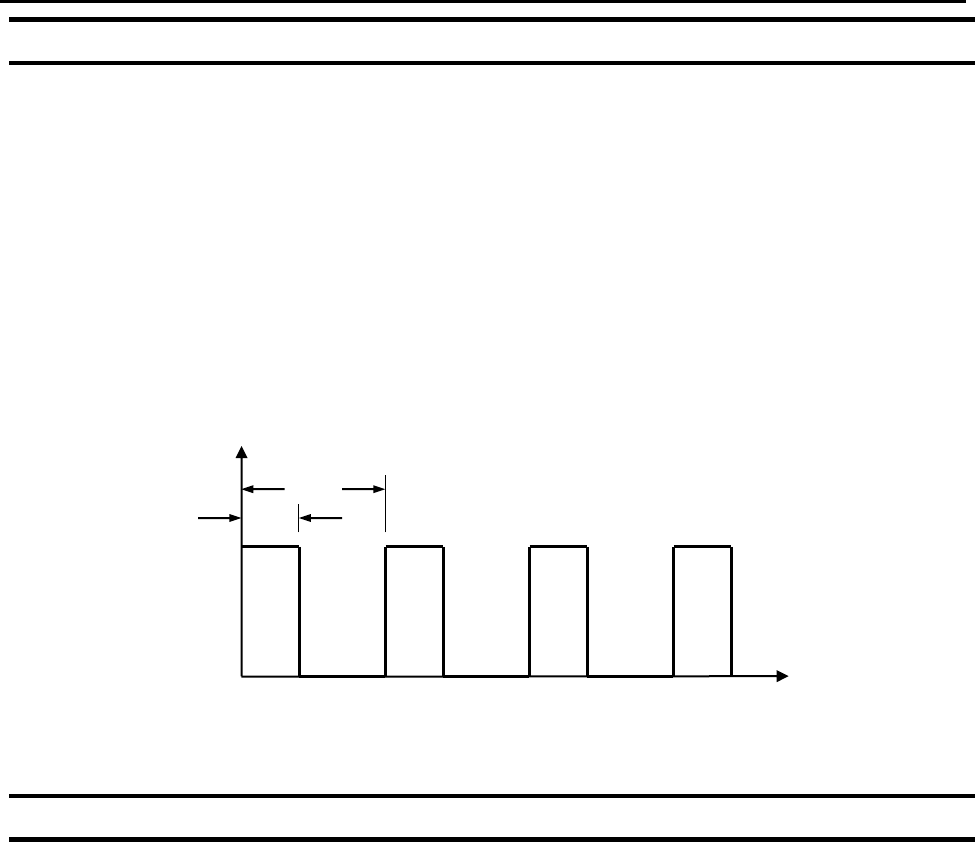
5.12 Auto Purge Setup
After the end of a program, the tip will go to the home position and material will be purged
in a continuous loop according to the parameters registered in the Auto Purge Setup
command.
This command is very useful for two part materials that have a very short pot life.
For example, if a Wait Time of 5s and a Purge Time of 2s is registered in the Auto Purge
Setup, the following chart shows the Purge pattern.
5.13 ESTOP Output Status
After receiving the emergency stop signal, the robot can set the status of all the outputs
as:
INITIAL: The status (On/Off) of the outputs is set as the initial status set by the
Initial IO command.
KEEP OUTPUT STATUS: The status (On/Off) of the outputs is left as it was before
the emergency signal.
Time (s)
Dispenser OFF
Dispenser ON
Wait
Purge
2
7
5
12
10
15
F4000N Series Operating Manual
Section 5: Point Type & Function Reference
Part # 562187N-1
Rev. D Sep 2012
86
© 2012 Fisnar Inc.
5.14 Acceleration
Controls the acceleration of each axis. The value entered in this setting is a robot
parameter and its exact relation to the robot‟s acceleration is beyond the scope of this
manual.
In general, the value of the acceleration parameter is inversely related to the robot‟s
acceleration. A small value will result in a high acceleration and vice versa.
Very small values can make the motors slip and can cause the driver cards to over
heat.
The default value is 25 for all the axes and values lower than 15 are not
recommended.
5.15 Pause Status
Pause Status sets the position to which the tip will move after pressing the Start button.
There are two options:
Home position: The tip will move to the home position.
Stand: The tip will stay at the position where the Start button was pressed.
F4000N Series Operating Manual
Section 5: Point Type & Function Reference
Part # 562187N-1
Rev. D Sep 2012
87
© 2012 Fisnar Inc.
5.16 USB Up/Down Load
The F4000N Series robots offer the convenience of a Universal Serial Bus (USB) port.
With this feature, you may load or save your programs directly to and from the robot with
a USB flash drive
1
. Updating the Operating System of the robot can also be done through
the USB drive.
Uploading/Downloading Programs
Instructions:
4) Turn the robot OFF.
5) Connect the USB drive to Robot USB port and then turn the robot ON.
6) Initialize the robot by pressing the Home/Start button.
7) Press the F4 Key (Setup Menu) and go to page 3.
8) Select USB Up/Down Load. The corresponding screen appears.
All Data: Copies all program files.
Part Data: Allows the user to select which program files to be loaded / saved.
Note: The robot automatically assigns the program number as its filename when saved to
the USB drive. It uses this filename to load the program to the same number on the
robot.
1
The USB Flash Drive must be in FAT file system format.
USB Up/Down Load
--------------------------
1. Upload to USB
2. Download from USB
Upload/Download from USB
--------------------------
1. All Data
2. Part Data