F4000N_revD.pdf - 第79页
F4000N Series Operating Manual Section 5: Point T ype & Function Reference Part # 562187N - 1 Rev . D Sep 201 2 78 © 20 12 Fisnar Inc. Z Clearance = 10 mm ABSOLUTE: Please see SECTION 6: Sample Programs for an exampl…
F4000N Series Operating Manual
Section 5: Point Type & Function Reference
Part # 562187N-1
Rev. D Sep 2012
77
© 2012 Fisnar Inc.
5.5 Z Clearance
The purpose of the Z Clearance function is to cause the tip to raise high enough to clear
all obstacles as it moves from one point to another. If there are no obstacles between any
of the program points, a small Z Clearance value, such as 5 mm, can be used to minimize
the program cycle time.
Values for the Z Clearance are registered by pressing the F4 (Setup) key, then choosing
Z Clearance. The Z Clearance value will be used by all points from that memory address
forward until another Z Clearance value is found. Normally, a Z clearance instruction
should be registered in the beginning of a program, at one of the first memory addresses.
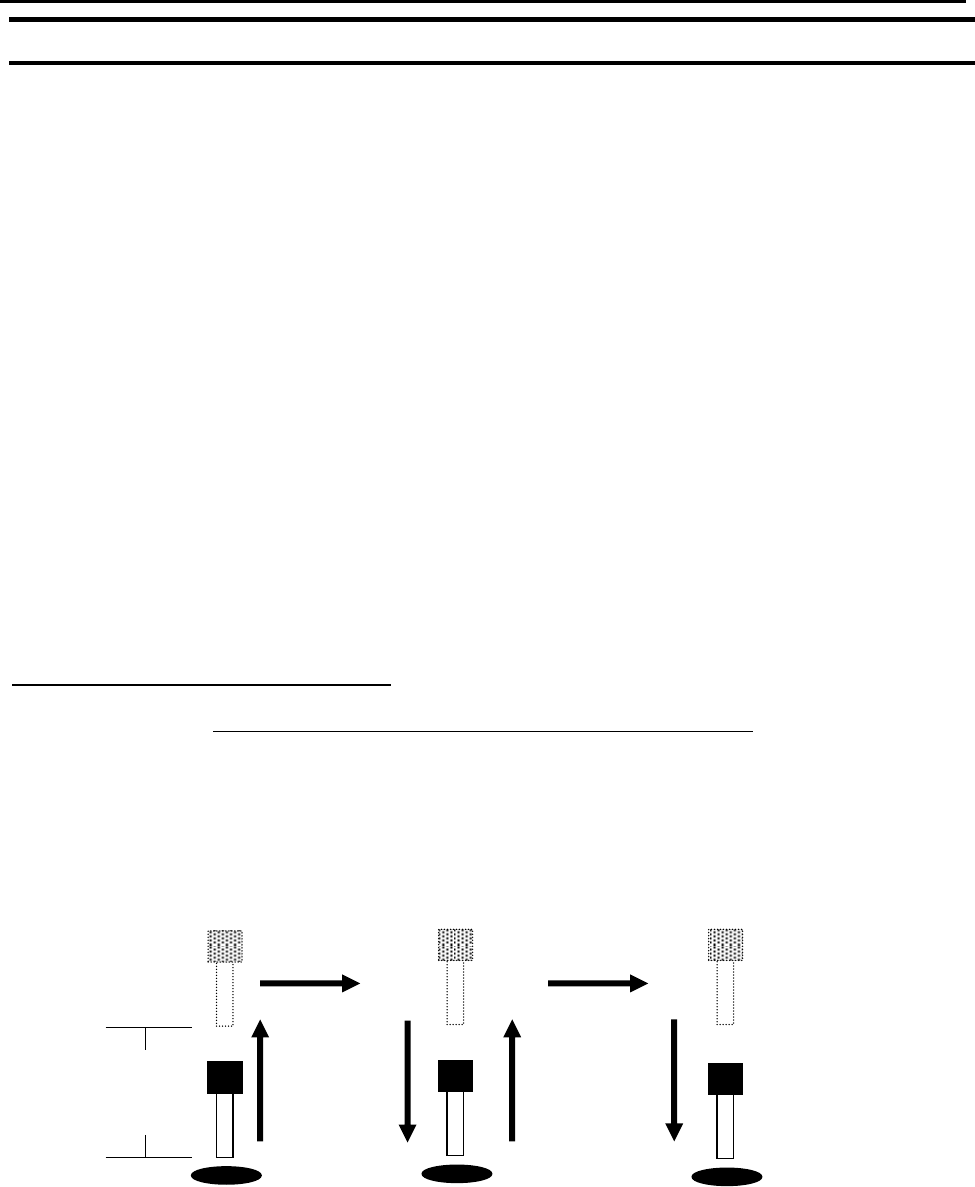
The Z Clearance value may be specified as a relative value or an absolute value. When
specified as a relative value, it is the distance to rise relative to the taught point location.
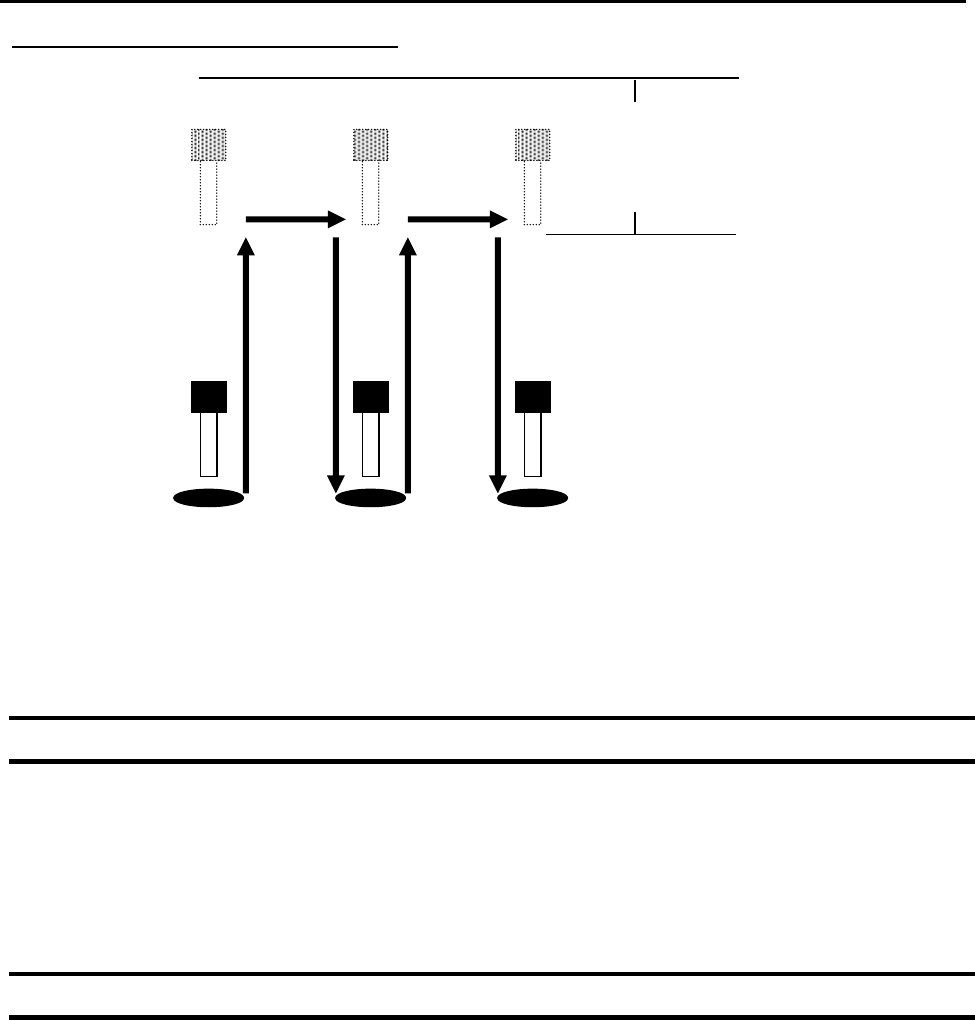
When it is specified as an absolute value, it is a distance from the Z-axis zero position,
where the tip will rise to, regardless of the Z-axis value of the taught point location. For
example:
Z Clearance = 10 mm RELATIVE:
10 mm
Z = 0 mm
F4000N Series Operating Manual
Section 5: Point Type & Function Reference
Part # 562187N-1
Rev. D Sep 2012
78
© 2012 Fisnar Inc.
Z Clearance = 10 mm ABSOLUTE:
Please see SECTION 6: Sample Programs for an example of the Z Clearance
instruction.
5.6 X/Y Move Speed
X/Y Move Speed sets default X and Y-axis movement speed as the tip moves between
figures in a program, such as from one dispense point to another or from the end of line
dispensing to the next start of line dispensing.
5.7 Z Move Speed
Z Move Speed sets default Z-axis movement speed as the tip moves between figures in a
program, such as from one dispense point to another or from the end of line dispensing to
the next start of line dispensing.
10 mm
Z = 0 mm
Z = 10 mm
F4000N Series Operating Manual
Section 5: Point Type & Function Reference
Part # 562187N-1
Rev. D Sep 2012
79
© 2012 Fisnar Inc.
5.8 Home Position Setup
Home Position Setup allows the user to change the location of the program home position.
The home position is the location to where the tip will move at the end of a program cycle
if the “End Program” or “Home Point” instruction is registered. The default home position
is (X=0, Y=0, Z=0).
To change the home position, jog the tip to the desired location for the new home position,
then press F4 (Setup)
Home Position Setup.
NOTE: When executing a program in TEACH MODE, the robot will move to the
mechanical home position (X=0, Y=0, Z=0) at the start of every program cycle. When
executing a program in RUN MODE, the robot will move to the home position set under
F4 (Setup)
Home Position Setup.