GXH—1.pdf - 第125页
4-32 041 1-002 -(M803WC---2003) X X X X X 轴 轴 轴 轴 轴 (A) (A) (A) (A) (A) 马达电路图 马达电路图 马达电路图 马达电路图 马达电路图 X Beam Axis (A) From BG (A) From BG (A) X Axis Motion Controller 0 (-U82) From SSCNET2 CH1 Plate Robot Cable Robot Cab…
4-31
Plate
Plate
Plate
Plate
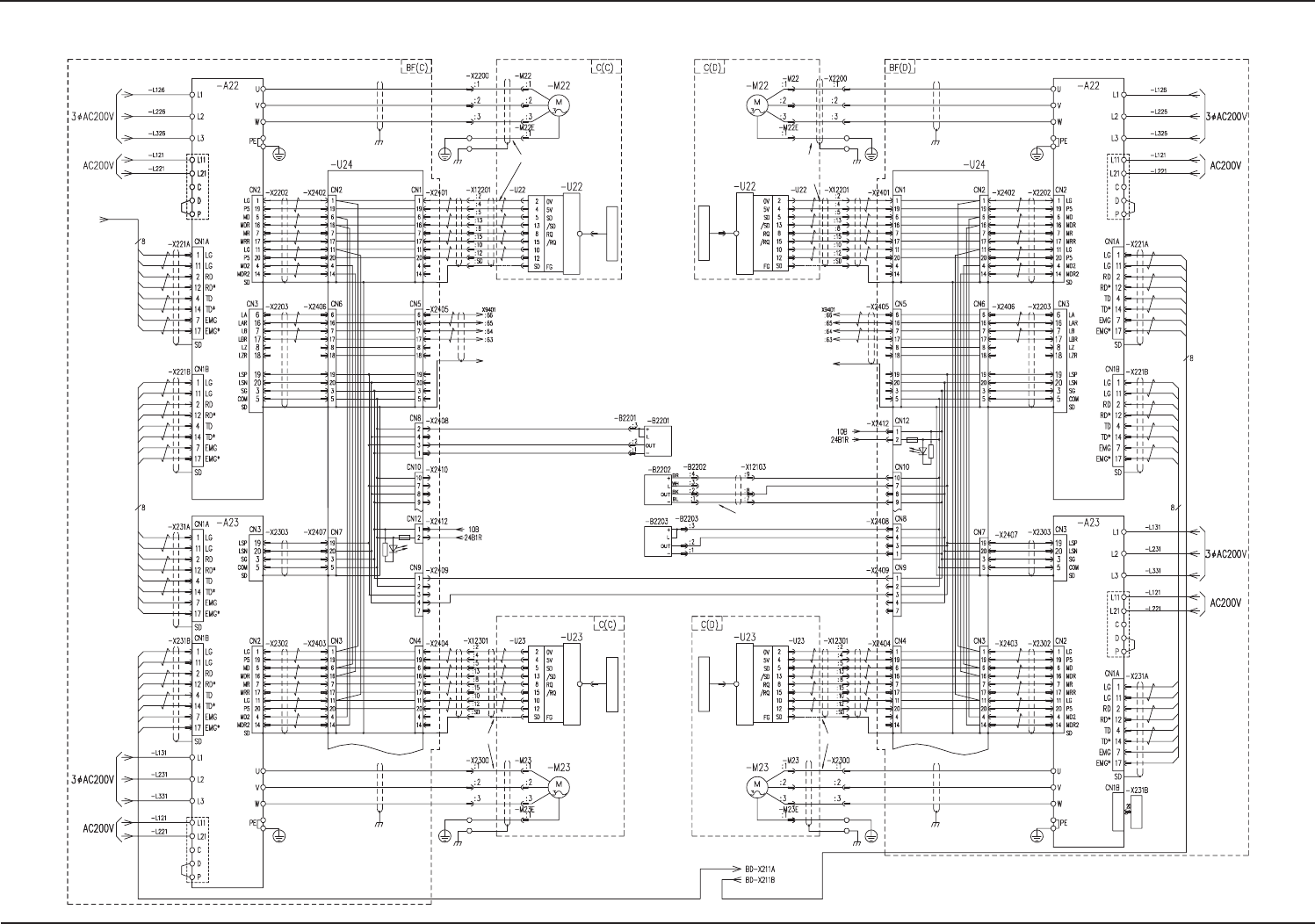
Y Beam Axis (C)
Y1 Axis
Y2 Axis
From BG (C)
From BG (C)
From BC-X211B
From BG (C)
From BG (C)
Robot Cable
Robot Cable
Robot Cable
Converter
Linear Scale Head
Converter
Linear Scale Head
(Phase A)
(/Phase A)
(/Phase B)
(Phase A)
(Phase B)
(/Phase A)
(/Phase B)
To -U94 (UB07)
CN1 (Counter Board)
To -U94 (UB07)
CN1 (Counter Board)
Robot Cable
Y-Axis Limit (+)
Y-Axis Limit (-)
Y-Axis Approach Detection
Robot Cable
Robot Cable
Converter
Linear Scale Head
Converter
Linear Scale Head
0V/
Sensor
5V/
Sensor
5 V/
Sensor
0 V/
Sensor
0V/
Sensor
5V/
Sensor
5 V/
Sensor
0 V/
Sensor
(Phase B)
Y Beam Axis (D)
Y1 Axis
From BG (D)
From BG (D)
Y2 Axis
From BG (D)
From BG (D)
Terminal
Connector
0411-002 -(M803WC---2002)
YY
YY
Y
轴轴
轴轴
轴
(C(C
(C(C
(C
、、
、、
、
D)D)
D)D)
D)
马达电路图马达电路图
马达电路图马达电路图
马达电路图
YY
YY
Y
轴轴
轴轴
轴
(C(C
(C(C
(C
、、
、、
、
D)D)
D)D)
D)
马达电路图马达电路图
马达电路图马达电路图
马达电路图
4-320411-002 -(M803WC---2003)
XX
XX
X
轴轴
轴轴
轴
(A)(A)
(A)(A)
(A)
马达电路图马达电路图
马达电路图马达电路图
马达电路图
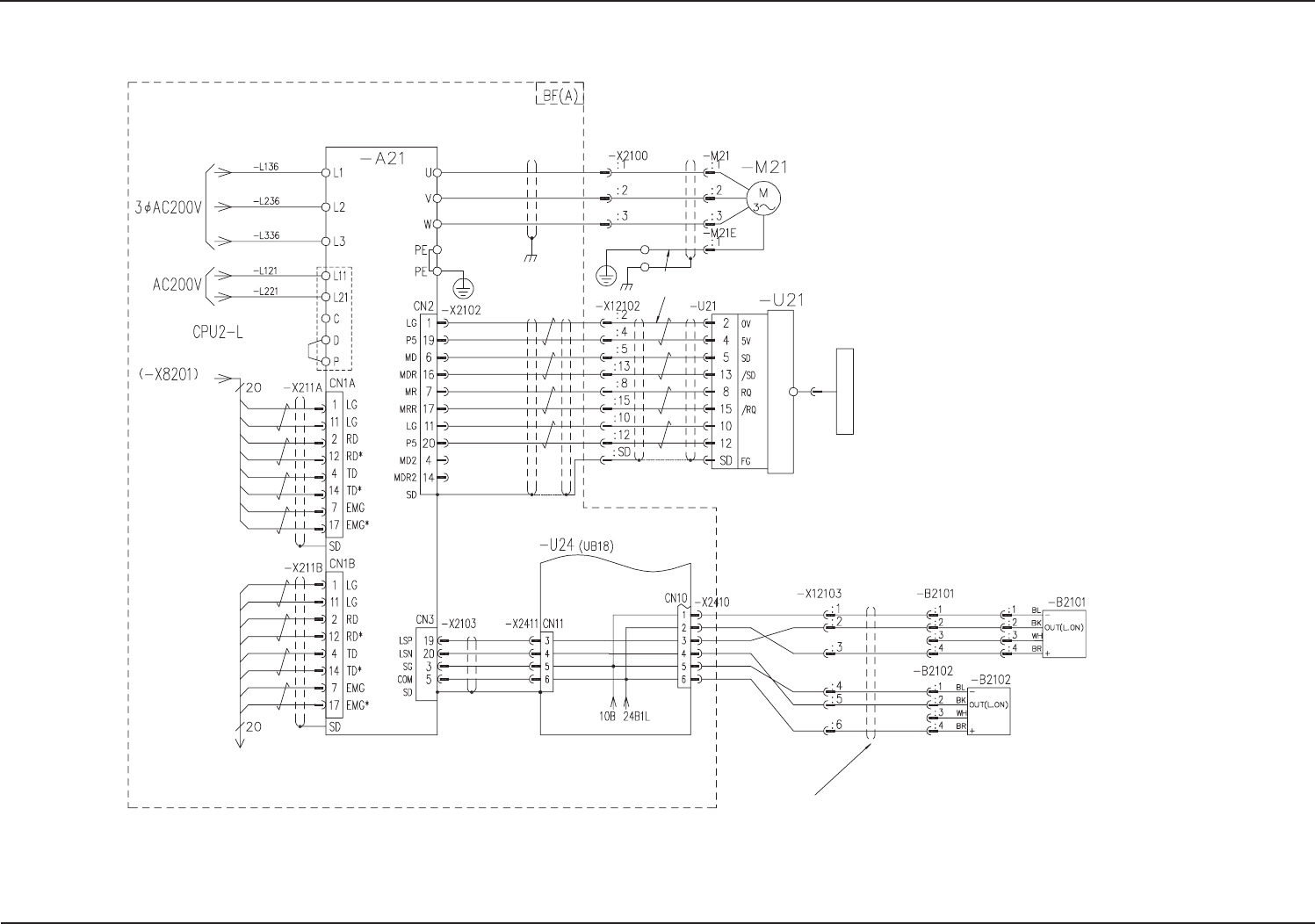
X Beam Axis (A)
From BG (A)
From BG (A)
X Axis
Motion Controller 0 (-U82)
From SSCNET2 CH1
Plate
Robot Cable
Robot Cable
Linear Encoder
Converter
0V/Sensor
5V/Sensor
X-Axis Limit (-)
X-Axis Limit (+)
To BA-X221A
XX
XX
X
轴轴
轴轴
轴
(A)(A)
(A)(A)
(A)
马达电路图马达电路图
马达电路图马达电路图
马达电路图
4-330505-003 A(M803WC---2004)
XX
XX
X
轴轴
轴轴
轴
(B)(B)
(B)(B)
(B)
马达电路图马达电路图
马达电路图马达电路图
马达电路图
XX
XX
X
轴轴
轴轴
轴
(B)(B)
(B)(B)
(B)
马达电路图马达电路图
马达电路图马达电路图
马达电路图
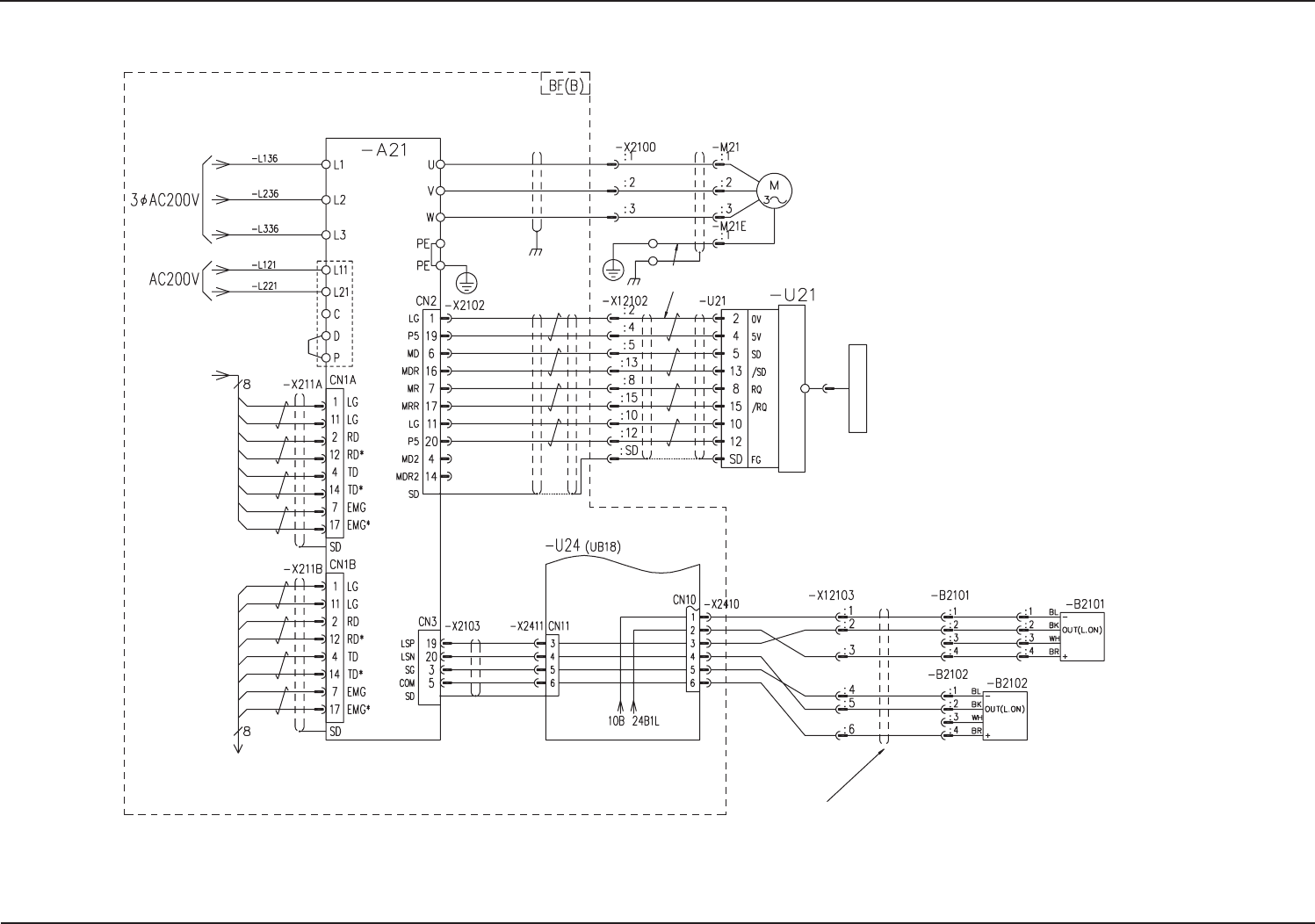
X Beam Axis (B)
From BG (B)
From BG (B)
X Axis
From BA-X231B
To BB-X221A
Plate
Robot Cable
Robot Cable
X-Axis Limit (-)
X-Axis Limit (+)
Linear Encoder
Converter
0V/Sensor
5V/Sensor