AIM 编程手册 QD057-03.pdf - 第125页
QD057-03 6. 在机器上编制 Job (使用 MEdit) AIM 编程手册 115 11.通过显示的影像检 查 X- 和 Y- 方向上的吸取位置。欲移动吸取位 置,单击定位按钮 ( 该 按钮有四个箭头 ) 接着单击 图像中要被吸取的地方。 12.如果元件的吸取位置正确,单击 [Nex t]。 如果还没有执行吸取高度测试,请继续执行步 骤 18。 供料器吸取高度的检查和编辑 NXTEJM015Ea
6. 在机器上编制 Job (使用 MEdit) QD057-03
114 AIM 编程手册
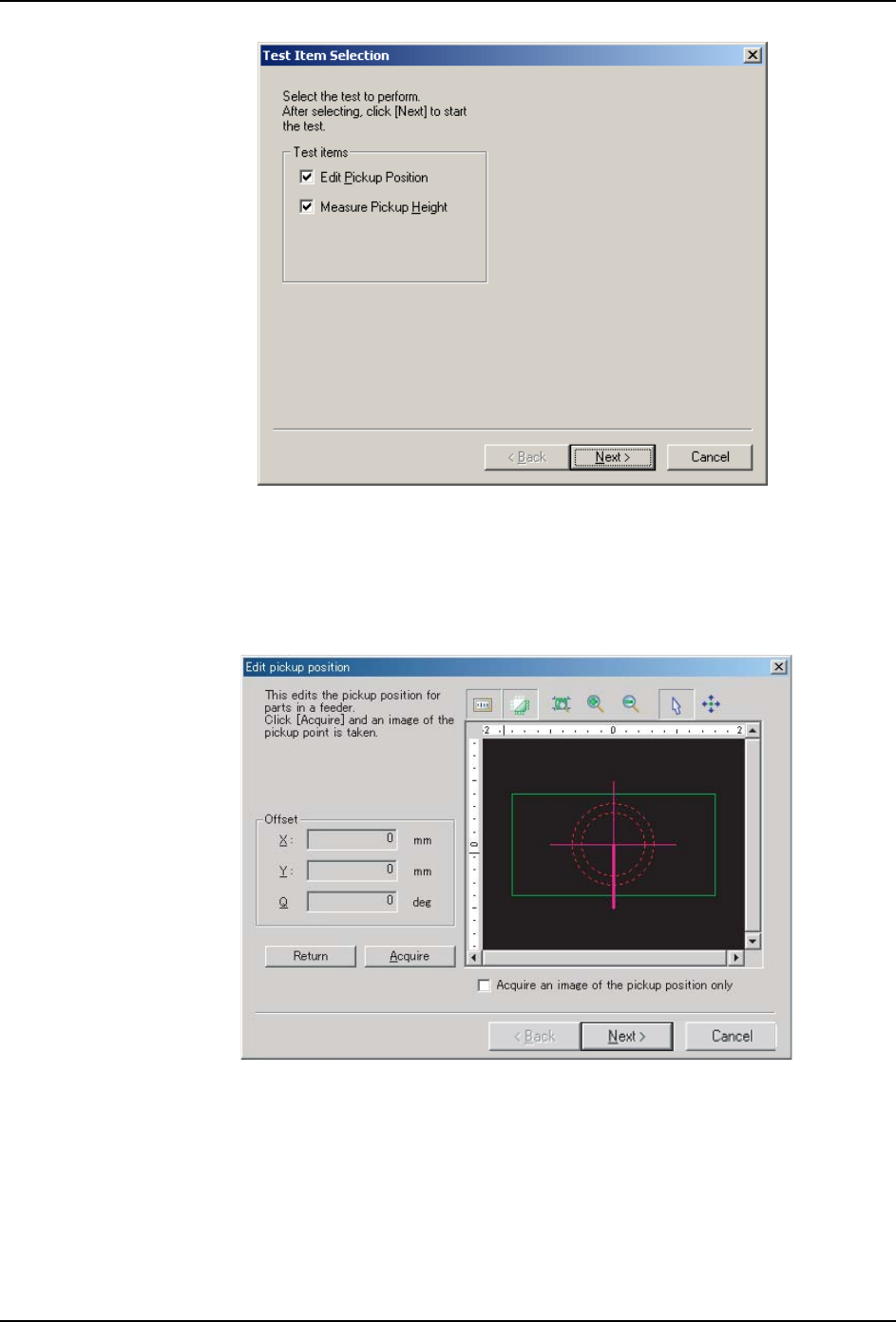
9. 在弹出的对话框中选择要执行测试的类型。 如果选择了 [Edit Pickup Position] 选项,
则继续执行下一步。如果只选择了 [Measure Pickup Height] 选项,则继续执行步骤 13。
备注 ) 因为吸取高度尺寸用作吸取压力控制,通过没有压力检测传感器的 head 是不能进行测试的。因
此,不能选择 “Measure pickup Height”项。只有 H01 和 F04head 才能执行测试。
在供料器中检查和编辑X和Y位置
10.弹出 [Edit pickup position] 步骤。请确认已经将元件放在正确的位置 ( 请参考“6.6.4
供料器送料数和吸取测试的料带返回方法”) 接着单击 [Acquire] 获取供料器中元件的
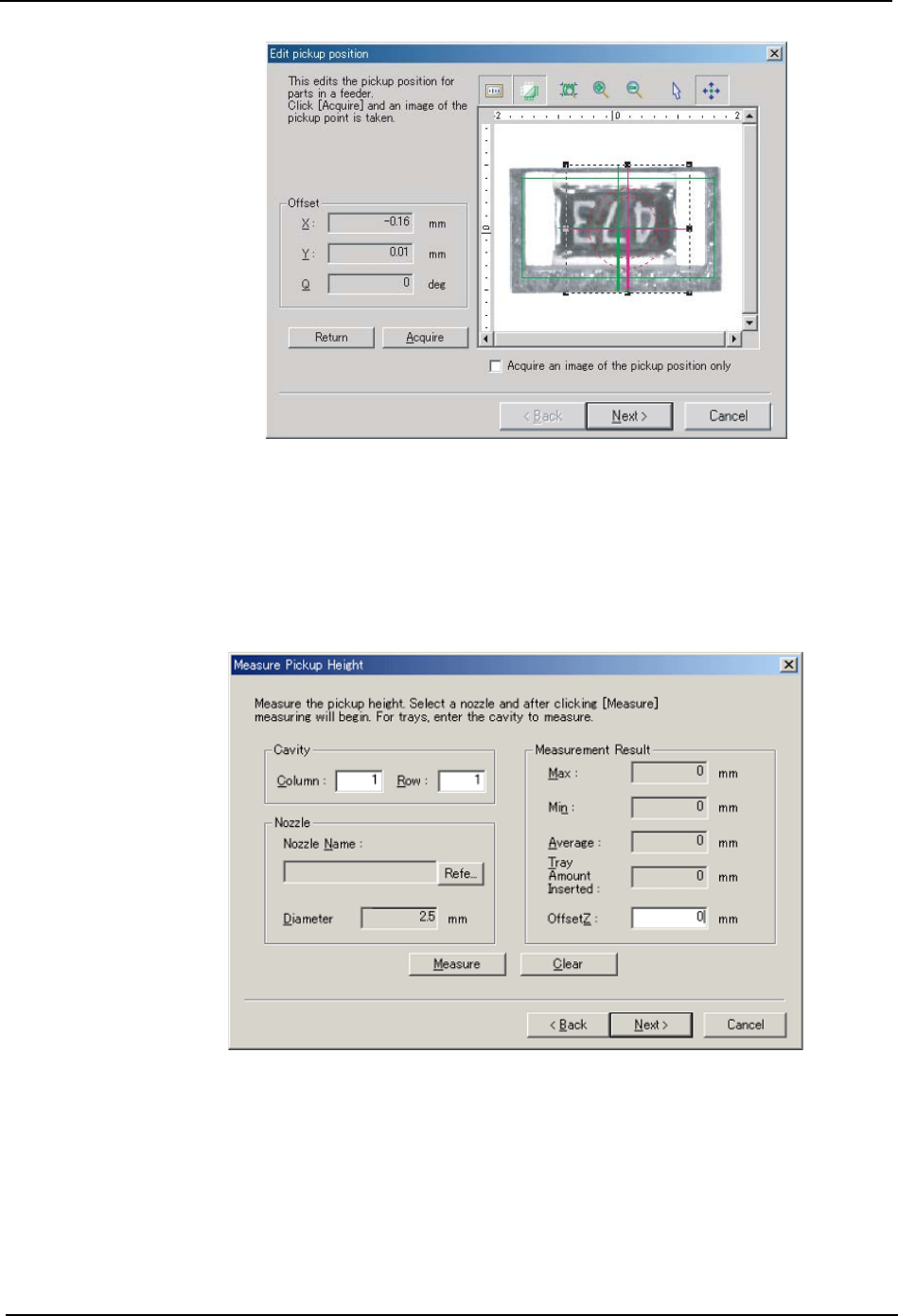
影像。获取的元件影像显示如下。
NXTEJM014Ea
QD057-03 6. 在机器上编制 Job (使用 MEdit)
AIM 编程手册 115
11.通过显示的影像检查 X- 和 Y- 方向上的吸取位置。欲移动吸取位置,单击定位按钮 ( 该
按钮有四个箭头 ) 接着单击图像中要被吸取的地方。
12.如果元件的吸取位置正确,单击 [Next]。如果还没有执行吸取高度测试,请继续执行步
骤 18。
供料器吸取高度的检查和编辑
NXTEJM015Ea
6. 在机器上编制 Job (使用 MEdit) QD057-03
116 AIM 编程手册
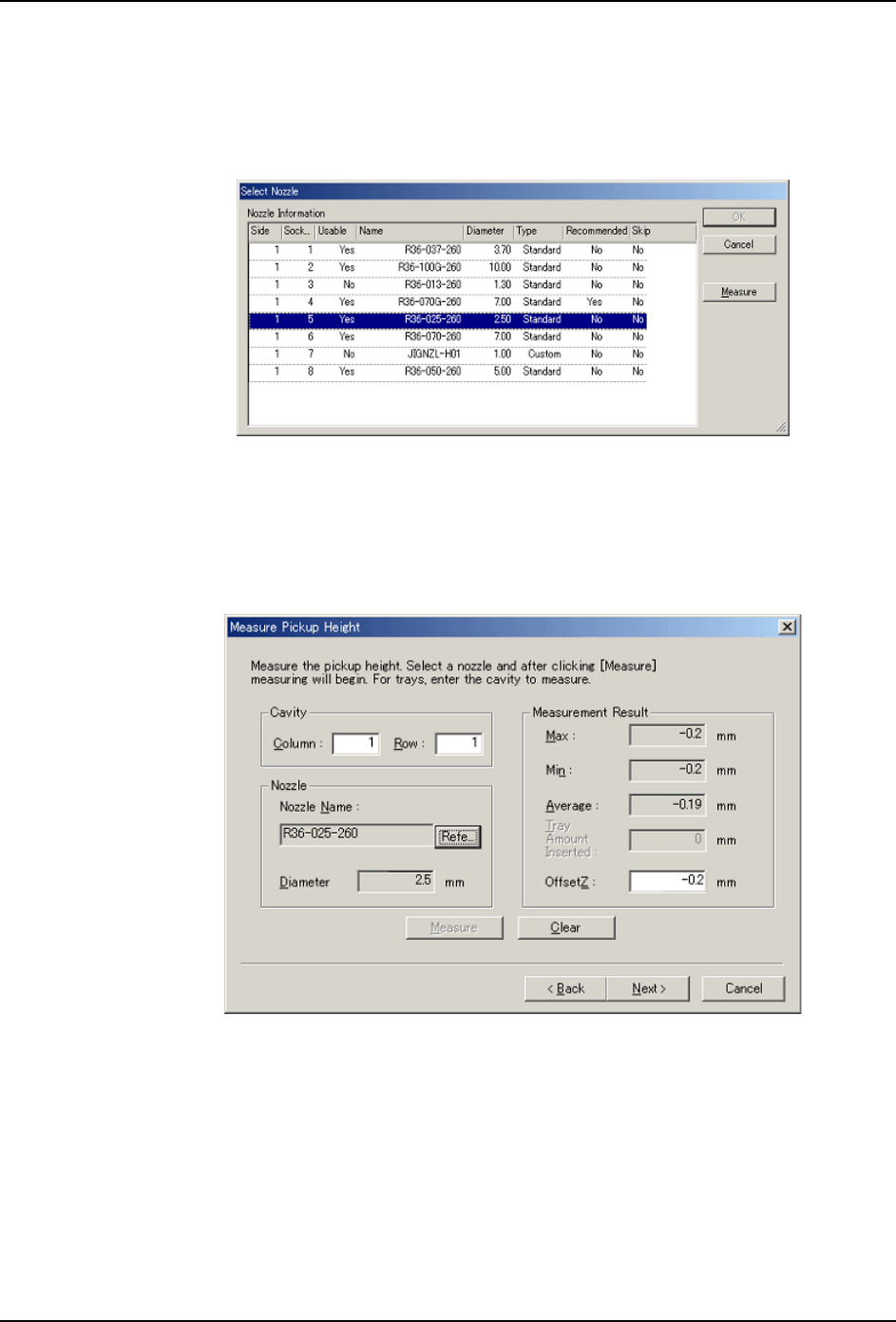
13.弹出[Measure Pickup Height]步骤。请确认已经将元件放在正确的位置 (请参考“6.6.4
供料器送料数和吸取测试的料带返回方法”),接着单击 [Ref.] 来对所使用的吸嘴或吸
爪 (仅限于工作头关闭)进行指定测试。
备注 ) 机器能够辨别出模组中所出现的吸嘴和吸爪 ( 指通过机器执行的检测 )。如果 Job 指定的吸嘴
和吸抓可用做高度尺寸,则该吸嘴和吸抓是通过自动选择的。
14.在弹出的对话框中选择吸嘴或吸爪(仅限于工作头关闭)要使用的尺寸,接着单击 [OK]。
备注 ) 如果模组还没有执行校正则不就不可能知道吸嘴平台上出现的吸嘴和吸爪,单击 [Measure] 检
测出现了吸嘴和吸爪的模组。
15.单击 [Measure] 开始执行吸取高度测试。
16.显示测试的结果同时自动决定 Z 方向的位移量。同时还可以通过手动来编辑该值。
备注 ) 当出现一步错误时,将弹出如下对话框。在对话框中单击 [Yes] 将头部向下移动 1mm 后再重新
测量。如果吸取的位置上没有元件,将会发生同样的错误。如果还不确定元件是否出现,请在
供料器中检查元件的状态。
注意 ) 在关闭工作头的情况下进行测量,即使在较低的位置吸嘴(吸爪)不能与元件接触,但是 Z 轴
最低位置将作为测量结果显示出来。如果再次进行测量,吸嘴(吸爪)位置低于先前测量结果
-1.5mm,测量值将会发生很大的改变。可以接受的测量结果是大约与元件实际接触时测量的位
置相同的测量值,所以要进行反复测量直到结果大约与先前一致。
17.一旦决定了 Z 的位移量并且该结果被接受后单击 [Next]。