UR5_User_Manual_zh_Global.pdf - 第102页
12.3 屏幕表达式编辑器 12.2 屏幕键盘 简单的文本输入和编辑功能。 Shift 键可用于输入一些其他特殊字符。 12.3 屏幕表达式编辑器 表达 式本身 可以 文本 形式进 行编 辑,同时, 也可 使用 表达式 编辑 器进 行编辑。 表达 式编辑器提 供许多按钮 和函数,可用 于插入特殊 表达式符号, 例如表示相 乘的 ∗ 符 CB3 I I-28 版本 3.2 (rev. 18629) . . 版权所有 © 2009-2015…
.
.12 屏幕编辑器
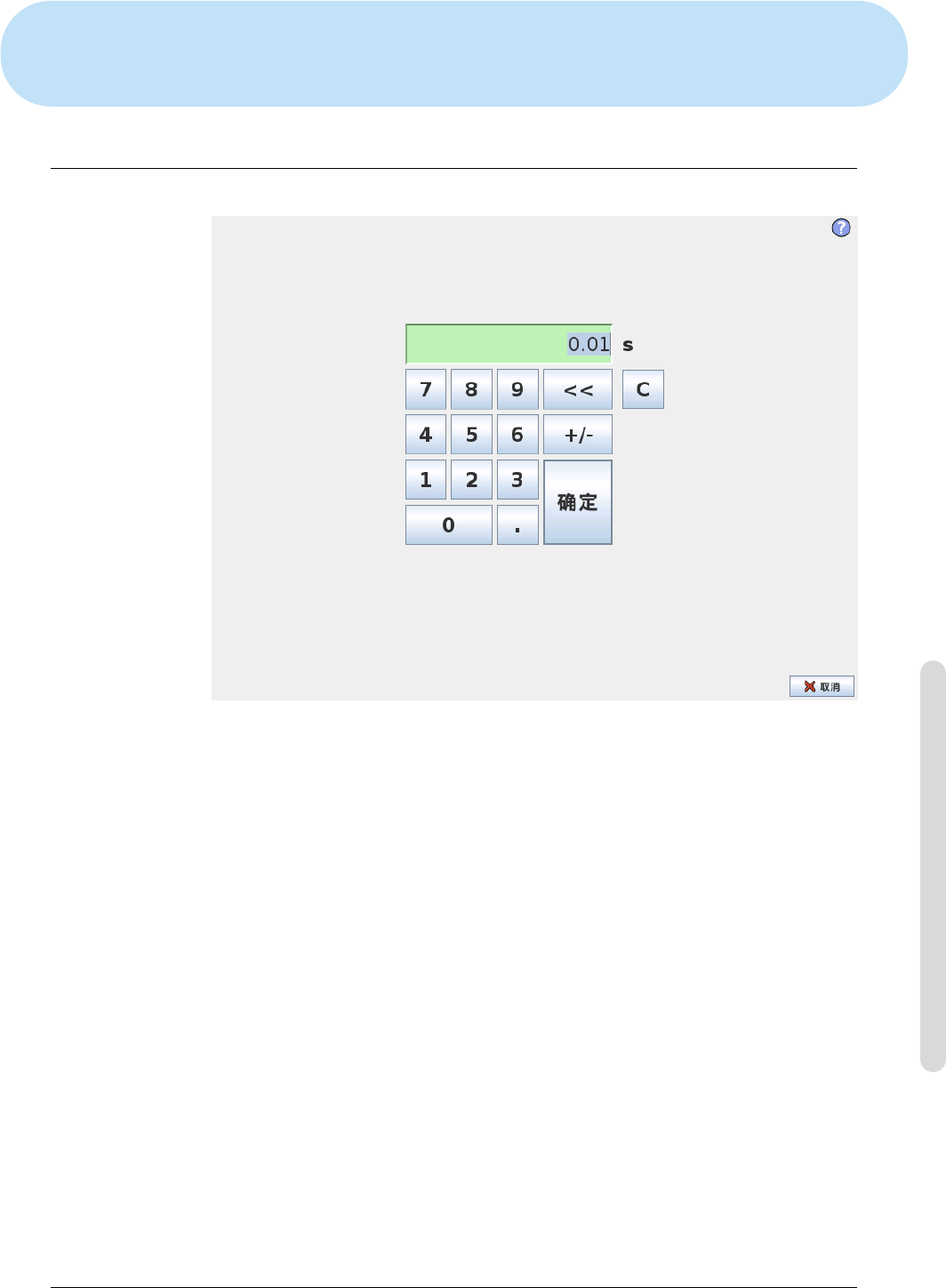
12.1 屏幕键盘
简单的数字输入和编辑功能。大部分情况下,数字旁边会显示输入值的单位。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-27 CB3
12.3 屏幕表达式编辑器
12.2 屏幕键盘
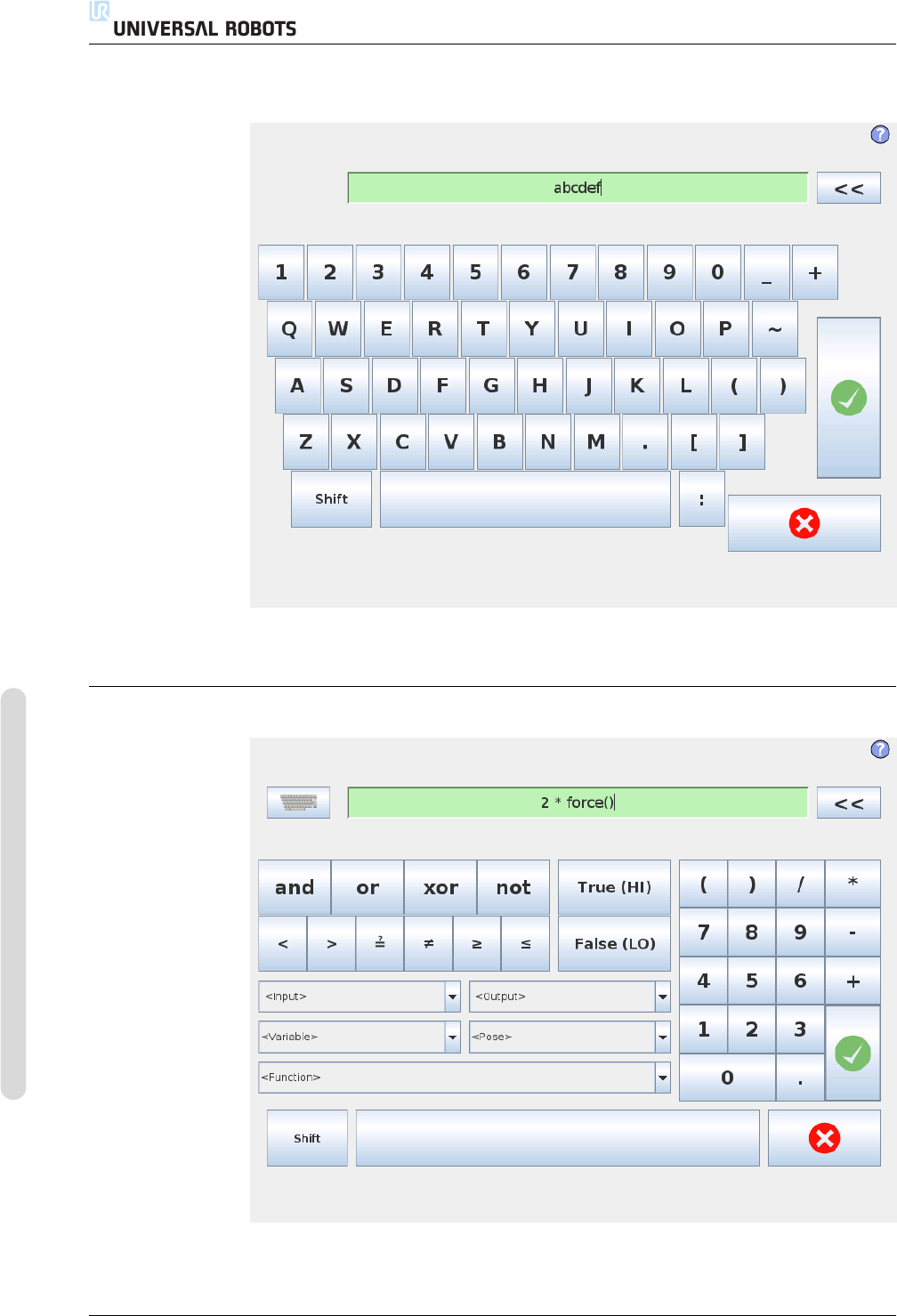
简单的文本输入和编辑功能。Shift 键可用于输入一些其他特殊字符。
12.3 屏幕表达式编辑器
表达式本身可以文本形式进行编辑,同时,也可使用表达式编辑器进行编辑。表达
式编辑器提供许多按钮和函数,可用于插入特殊表达式符号,例如表示相乘的 ∗ 符
CB3 II-28 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
12.4 位姿编辑器屏幕
号和表示小于等于的 ≤ 符号。使用屏幕右上角的键盘符号按钮可切换至表达式文
本编辑模式。所有已定义的变量都可在变量选择器中找到,输入和输出端口的名称
可在输入和输出选择器中找到。一些特殊函数可在函数选择器中找到。
按确定按钮时,系统将检查表达式有无语法错误。单击取消按钮可离开此屏幕,放
弃所有更改。
表达式类似如下形式:
digital in[1]
?
=True and analog in[0]<0.5
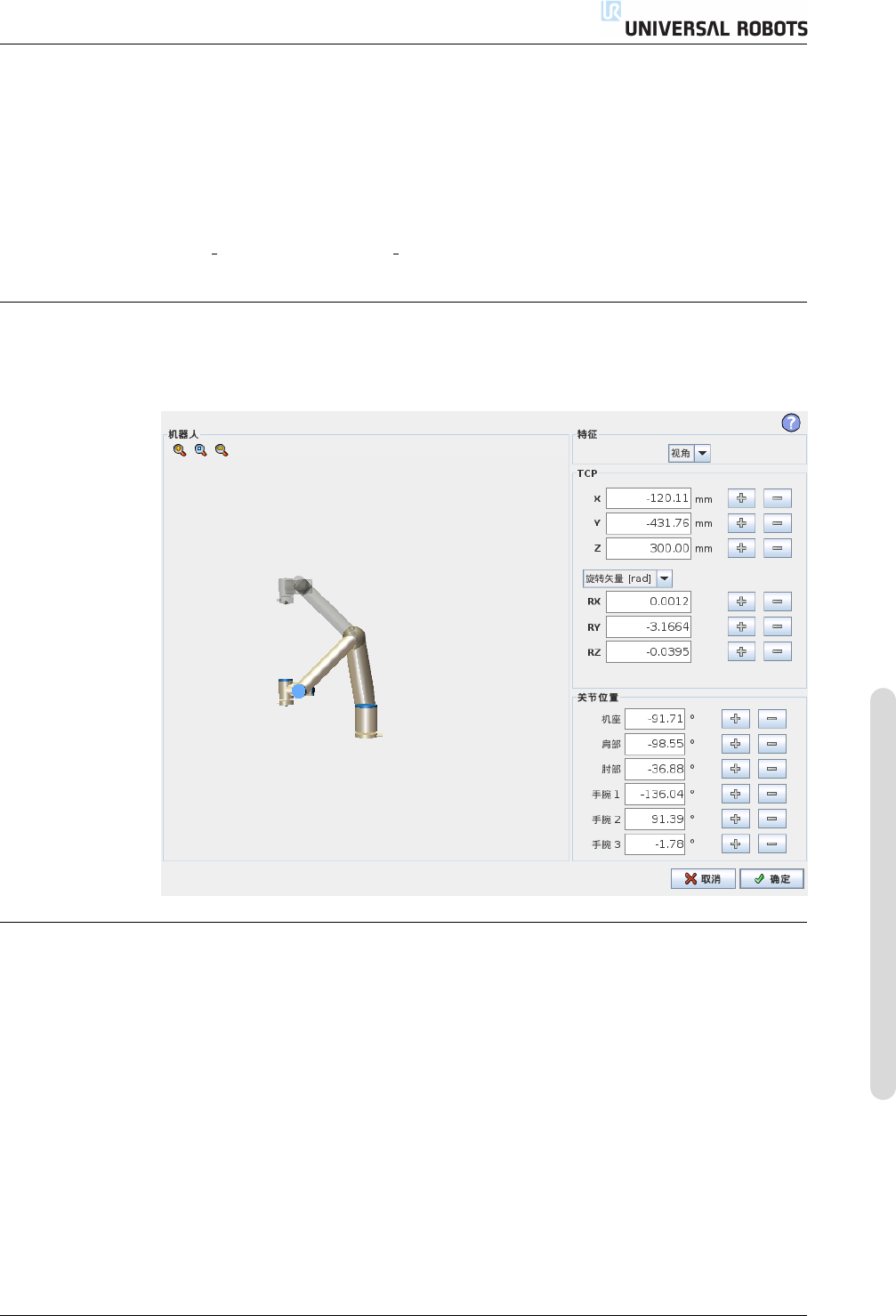
12.4 位姿编辑器屏幕
可以在此屏幕上指定机器人工具的目标关节位置或目标位姿(位置和方向)。屏幕
“离线”,不直接控制机器人手臂。
机器人
以 3D 视角形式显示机器人手臂的当前位置和指定的新目标位置。机器人手臂 3D
图显示机器人手臂的当前位置,机器人手臂 “阴影部分” 显示由屏幕右侧指定值控
制的机器人手臂的目标位置。按放大镜图标可缩放视角,拖动手指图标可更改视
角。
如果机器人 TCP 的指定目标位置距离安全板或触发板很近,又或者机器人工具的
方向接近工具方向边界极限(详见 10.12),则会显示相邻边界的 3D 成像。
安全板以黄黑色呈现,带小箭头指示安全板正常,显示安全板上允许放置机器人
TCP 的位置。触发板以蓝绿色呈现,带小箭头指向触发板的一侧,在该侧正常模式
限制处于激活状态(详见 10.6)。工具方向边界极限以锥体呈现,带一个矢量指示
机器人工具的当前方向。锥体内部代表允许的工具方向(矢量)。
目标机器人 TCP 离开极限区域时,3D 成像消失。如果目标 TCP 违反边界限制或
接近边界极限,则成像会变成红色。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-29 CB3