UR5_User_Manual_zh_Global.pdf - 第110页
13.5 安装设置 → 加载 / 保存 13.5 安装设置 → 加载 / 保存 机器人 安装 设置涵 盖了 机器人 在工 作环境 中设 置的方 方面 面。包括 机器 人手臂 的机 械安 装、与其 他设 备的电 气连 接,以 及机器 人程 序依 赖的所 有其 他选 项。不包 括程 序本身。 这些 设 置 可 使 用 安 装 设 置 选 项卡 下 的 各 个屏 幕 进 行 设 置,有 一 个 例外 就 是 I/O 域 在 I/O 选项卡中进…
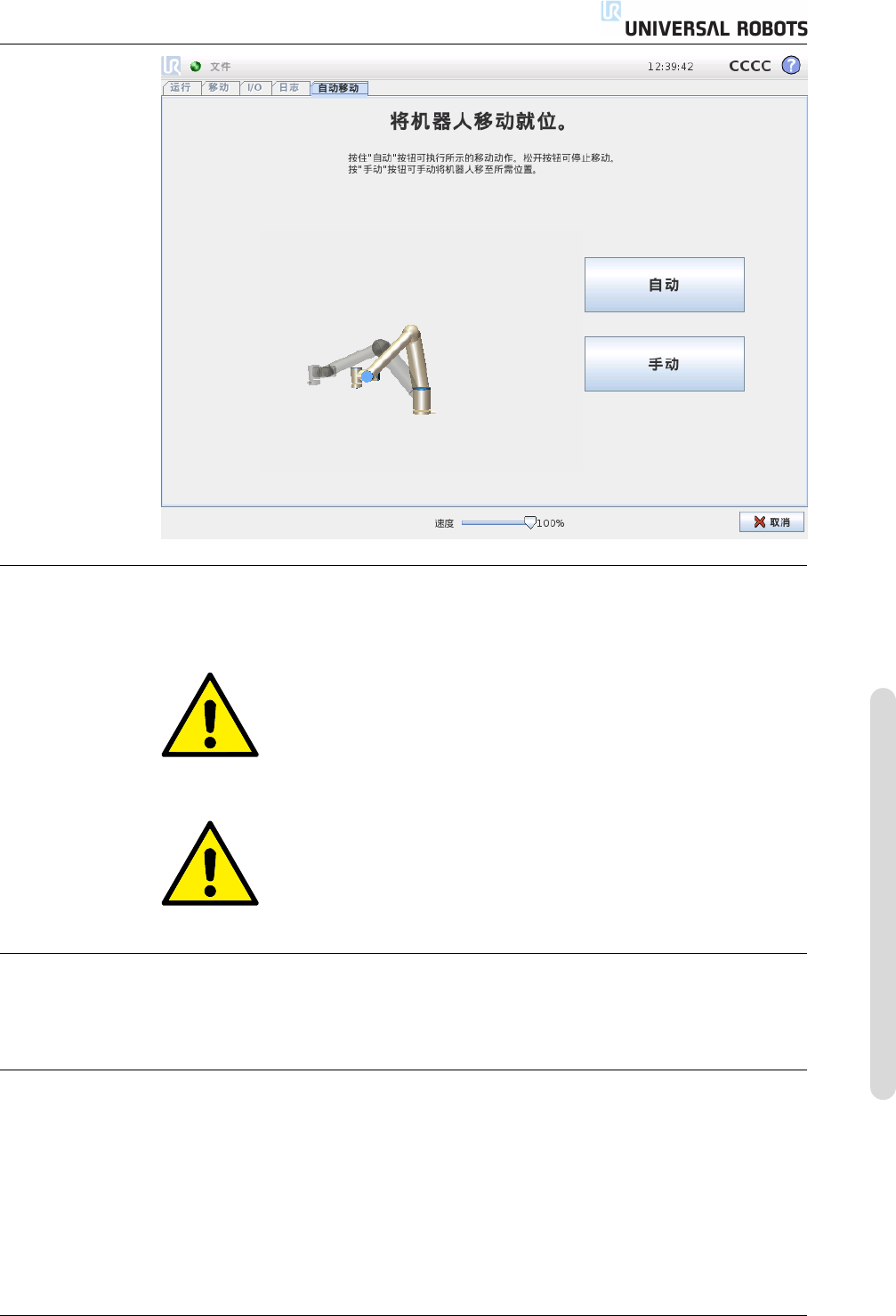
13.4 自动移动选项卡
动画
动画显示机器人手臂将要进行的动作。
小心:
比较动画和真实机器人手臂的位置,确保机器人手臂可以安全地运
动,不会打到障碍物。
小心:
自动移动功能使机器人沿着阴影区轨道移动。碰撞可能会损坏机器
人或其他设备。
自动
按住自动按钮可按动画所示移动机器人手臂。注意:可随时释放该按钮,使机器人
停止运动!
手动
按下手动按钮,将跳转至移动选项卡,在这里可以手动移动机器人手臂。如果动画中
的运动不理想,则可以采用手动模式。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-35 CB3
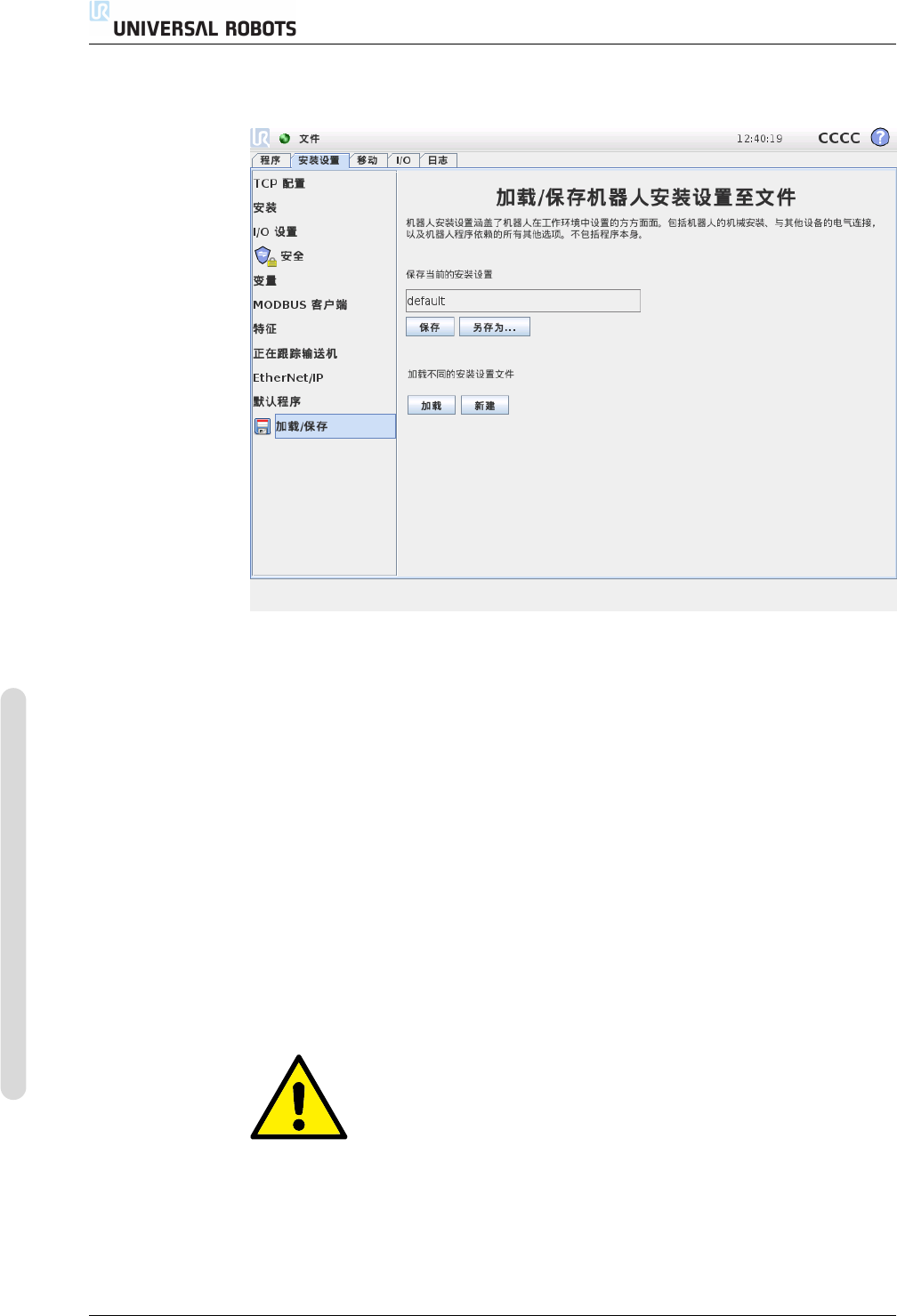
13.5 安装设置 → 加载/保存
13.5 安装设置 → 加载/保存
机器人安装设置涵盖了机器人在工作环境中设置的方方面面。包括机器人手臂的机
械安装、与其他设备的电气连接,以及机器人程序依赖的所有其他选项。不包括程
序本身。
这些设置可使用 安装设置 选项卡下的各个屏幕进行设置,有一个例外就是 I/O 域
在 I/O 选项卡中进行设置 (请查阅 13.2)。
可以为机器人保存多份安装设置文件。所创建的程序将使用当前处于激活状态的安
装设置,在使用程序时会自动加载此安装设置。
对安装设置所做的任何更改均需要进行保存,以备断电后能够得以保留。如果安装
设置中有未保存的更改, 安装设置 选项卡左边的加载/保存文本附件会出现一个软盘
图标。
按下保存或另存为. . . 按钮可保存安装设置。此外,保存程序也会保存处于激活状态
的安装设置。请使用加载按钮来加载另一个安装设置文件。新建按钮重置机器人安
装设置中的所有设置,使其恢复出厂设置。
小心:
不推荐使用 USB 驱动器加载机器人安装设置。要使用 USB 驱动
器里面存储的安装设置,需首先加载该安装设置,然后使用 另存
为. . . 按钮将其保存在本地程序文件夹中。
CB3 II-36 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
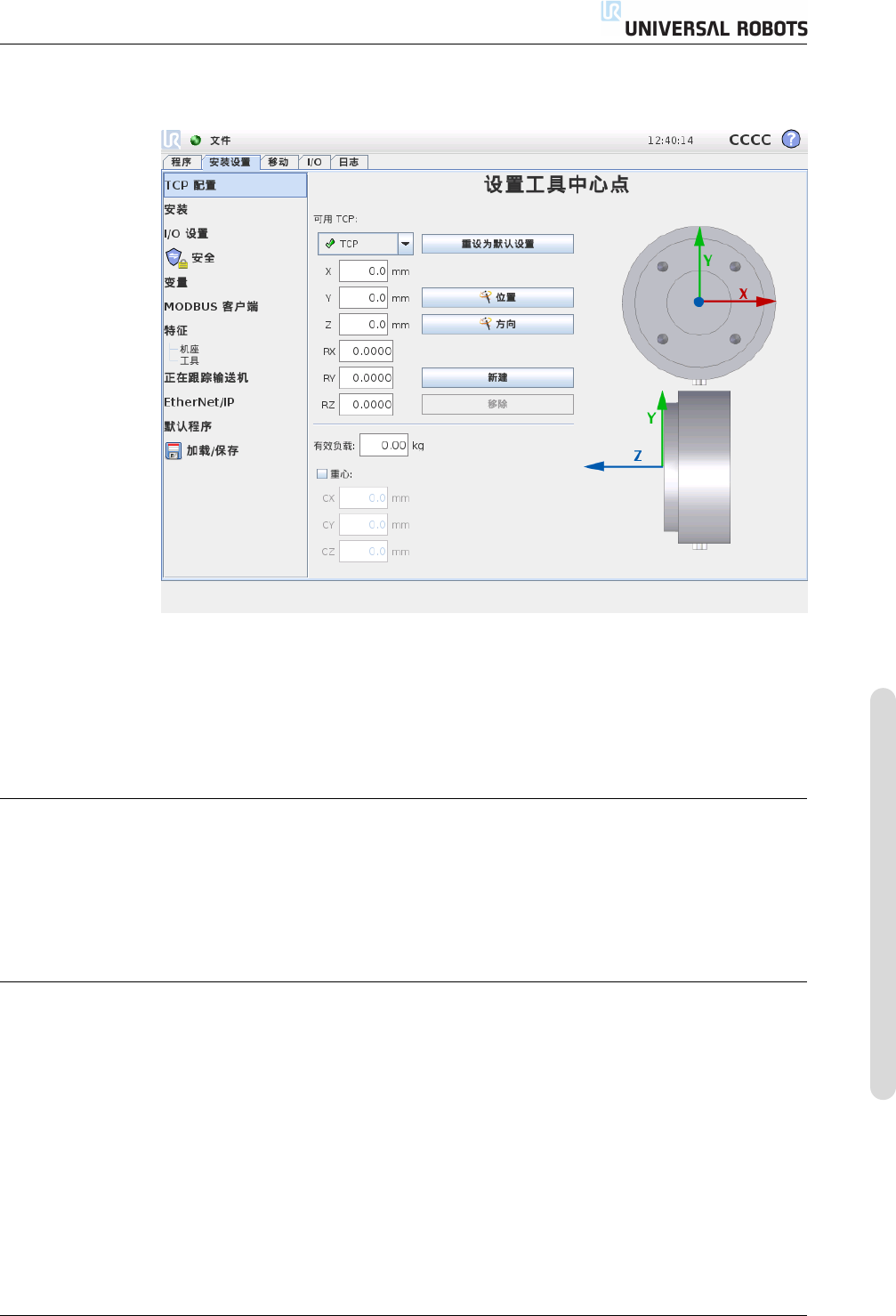
13.6 安装设置 → TCP 配置
13.6 安装设置 → TCP 配置
工具中心点(TCP)既机器人工具的特征点。多个指定的 TCP 可在此屏幕上定
义。每个 TCP 都包含相对于工具输出法兰中心而设定的转换和旋转,如屏幕上的
图形所示。位置坐标 X、Y 和 Z 决定了 TCP 的位置,而 RX、RY 和 RZ 决定了
其方向。当指定的值均为零时,TCP 与工具输出法兰的中心点重合,并应用屏幕右
侧显示的坐标体系。
13.6.1 添加、修改和删除 TCP
要定义新的 TCP,请点击新建按钮。所创建的 TCP 会自动获取一个唯一的名称,
并出现在下拉菜单中供选择。
所选 TCP 的转换和旋转可以通过点击相应的空白文本字段并输入新值来修改。
要删除所选的 TCP,只需点击删除按钮。最后一个剩余 TCP 无法删除。
13.6.2 默认和激活的 TCP
严格来说,所配置的 TCP 中有一个是默认 TCP。在 TCP 下拉菜单中,默认 TCP
的名称左侧有一个绿色图标。要将当前所选的 TCP 设为默认 TCP,点击设为默认
按钮。
总有一个 TCP 偏移用作激活的 TCP 偏移,来决定笛卡尔空间中的所有线性运动。
此外,用户可在 “图形” 选项卡(参见 14.29)上观看激活 TCP 的运动。在程序运
行前,以及在程序启动前,先将默认 TCP 设为激活的 TCP。在程序中,任何指定
TCP 都可设为激活的 TCP 用于机器人的特别移动(参见 14.5和14.10)。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-37 CB3