UR5_User_Manual_zh_Global.pdf - 第150页
14.24 命令:力 “ 盒 子 ” 模 式 使用 三 个 矢 量 定 义 盒 子的 边。这 三个 矢量 由 四 个 点 确 定, 第 一 个矢 量 从点 一至点 二,第 二个矢 量从 点二 至点三, 第三 个矢 量从点 三至 点四。每 个矢 量按 输入的 间隔 计数进 行划 分。模式 中的 具体位 置只 需按比 例添 加间隔 矢量 即可计 算得 出。 “ 直线 ” 和 “ 方块 ” 模式的原理方式与此类似。 机器 人经 过 各个 模 …
14.23 命令:模式
“开关情况” 结构可以指示机器人根据传感器输入或变量值来改变其行为。使用表达
式编辑器可描述基本条件并定义机器人应继续执行此开关命令的子命令的情况。如
果条件被评估为匹配其中一种情况,则执行情况命令内的行。如果默认情况命令已指
定,那么只有当没有找到其他匹配的情况时,行才会被执行。
每个开关命令可以包含多个情况命令和一个默认情况命令。开关命令只能有一种情况,
那就是任何情况值都已定义。情况命令可使用屏幕上的按钮添加。情况命令可从该开
关屏幕上移除。
14.23 命令:模式
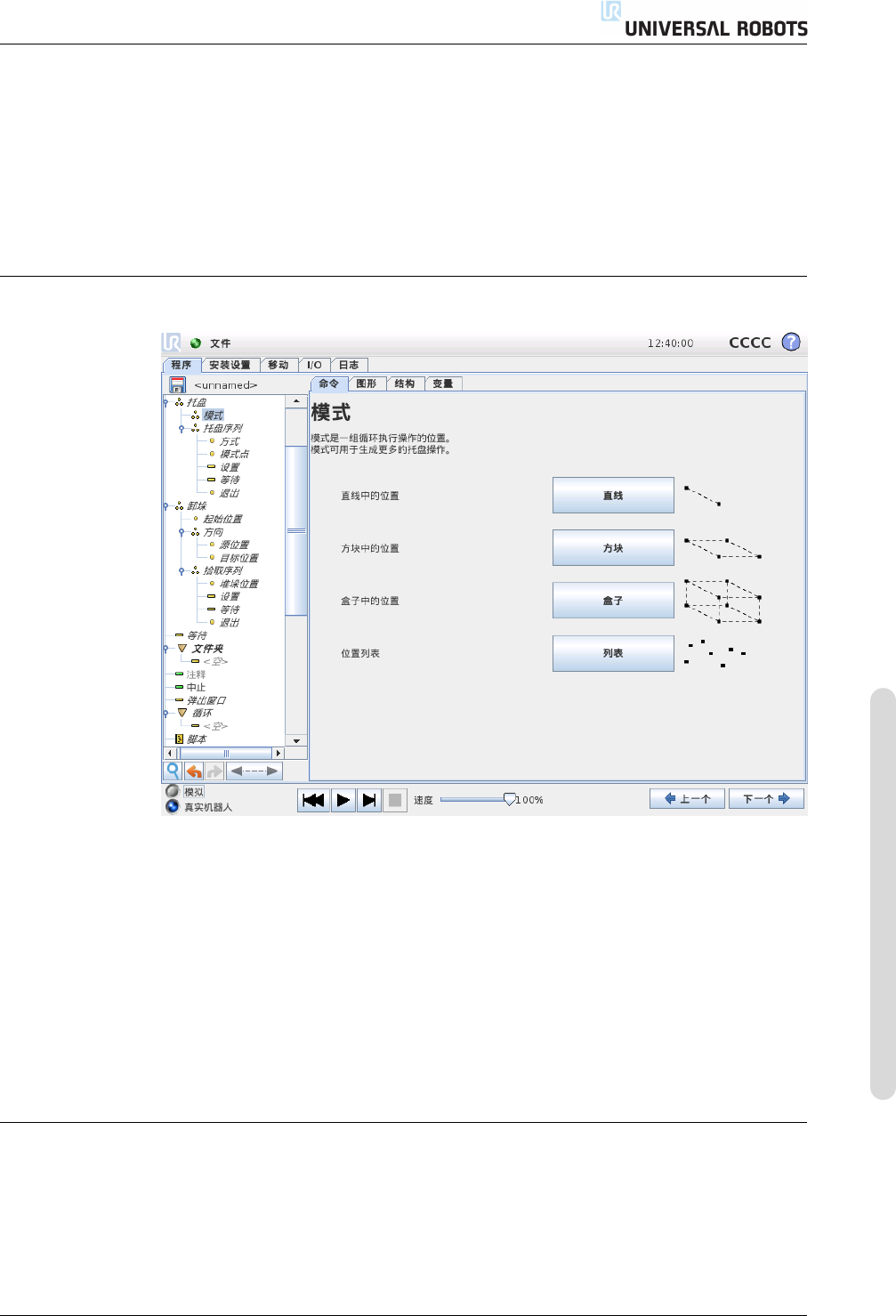
“模式” 命令可用于在机器人程序中指示机器人循环通过各个位置。每次执行 “模
式” 命令时,其均与一个位置相对应。
模式可分为四种类型。前三种分别是 “直线”、“方块” 和 “盒子”,这三种可用于表
示符合正规模式的位置。正规模式通过定义模式各边的多个特征点来定义。“直线”
模式由两个端点来确定,“方块” 模式由四个角点中的三个角点来确定,“盒子” 由
八个角点中的四个角点来确定。编程员输入沿模式每条边的位置数量。然后,机器
人控制器通过按比例添加矢量来计算各个模式位置。
如果要经过的位置不属于正规模式,可以选择 “列表” 选项,编程员可在其中指定
包含所有位置的位置列表。通过此方式,可以实现各种位置排列。
定义模式
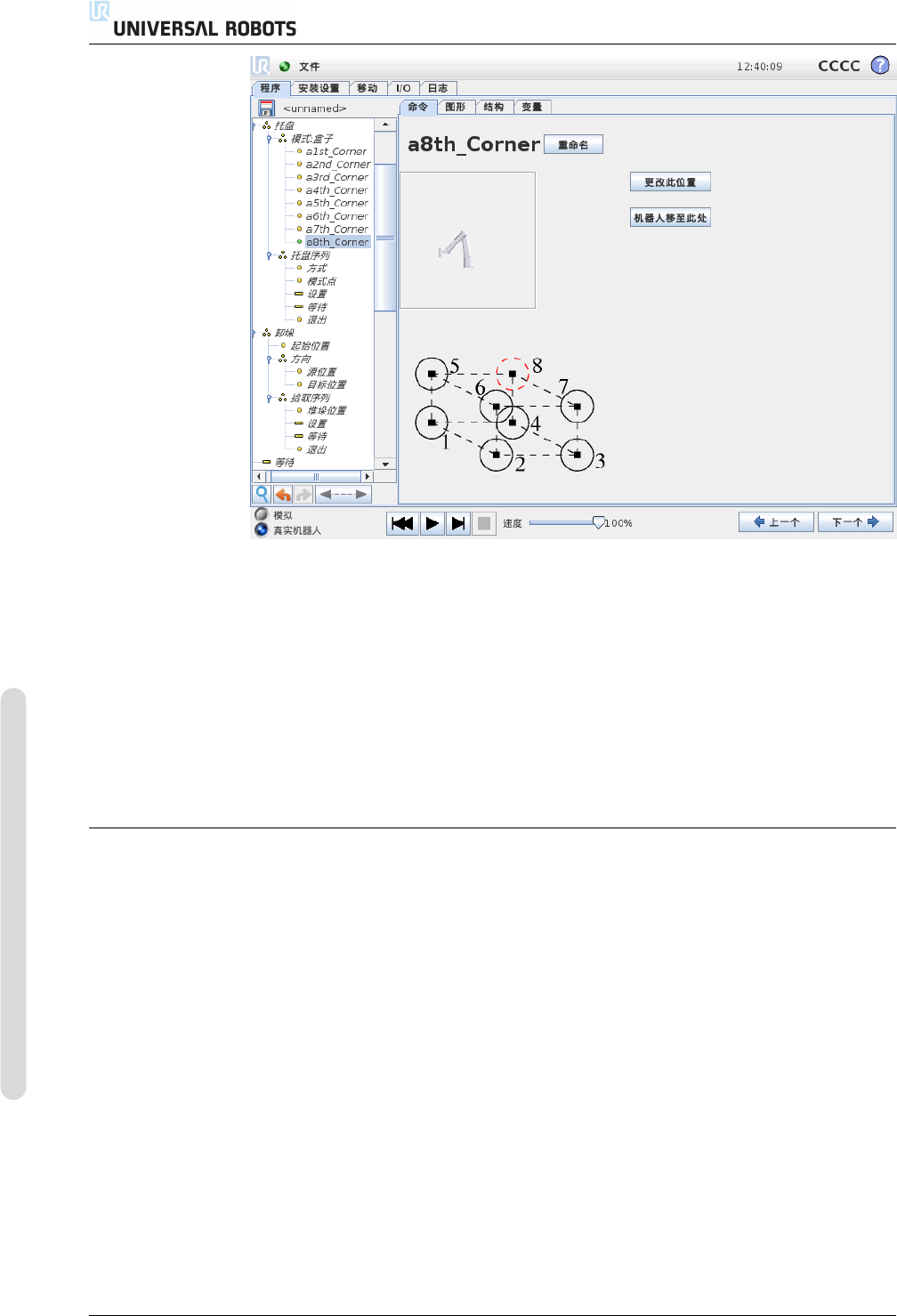
选择 “盒子” 模式时,屏幕将变成如下图所示。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-75 CB3
14.24 命令:力
“盒子” 模式使用三个矢量定义盒子的边。这三个矢量由四个点确定,第一个矢量
从点一至点二,第二个矢量从点二至点三,第三个矢量从点三至点四。每个矢量按
输入的间隔计数进行划分。模式中的具体位置只需按比例添加间隔矢量即可计算得
出。
“直线” 和 “方块” 模式的原理方式与此类似。
机器人经过各个模式位置,程序会使用一个计数变量。您可在模式命令屏幕中看到
这个变量的名称。变量从数字 0 一直循环增加至 X ∗ Y ∗ Z − 1(模式中的点数)。
此变量可通过赋值命令进行操作,并可在表达式中使用。
14.24 命令:力
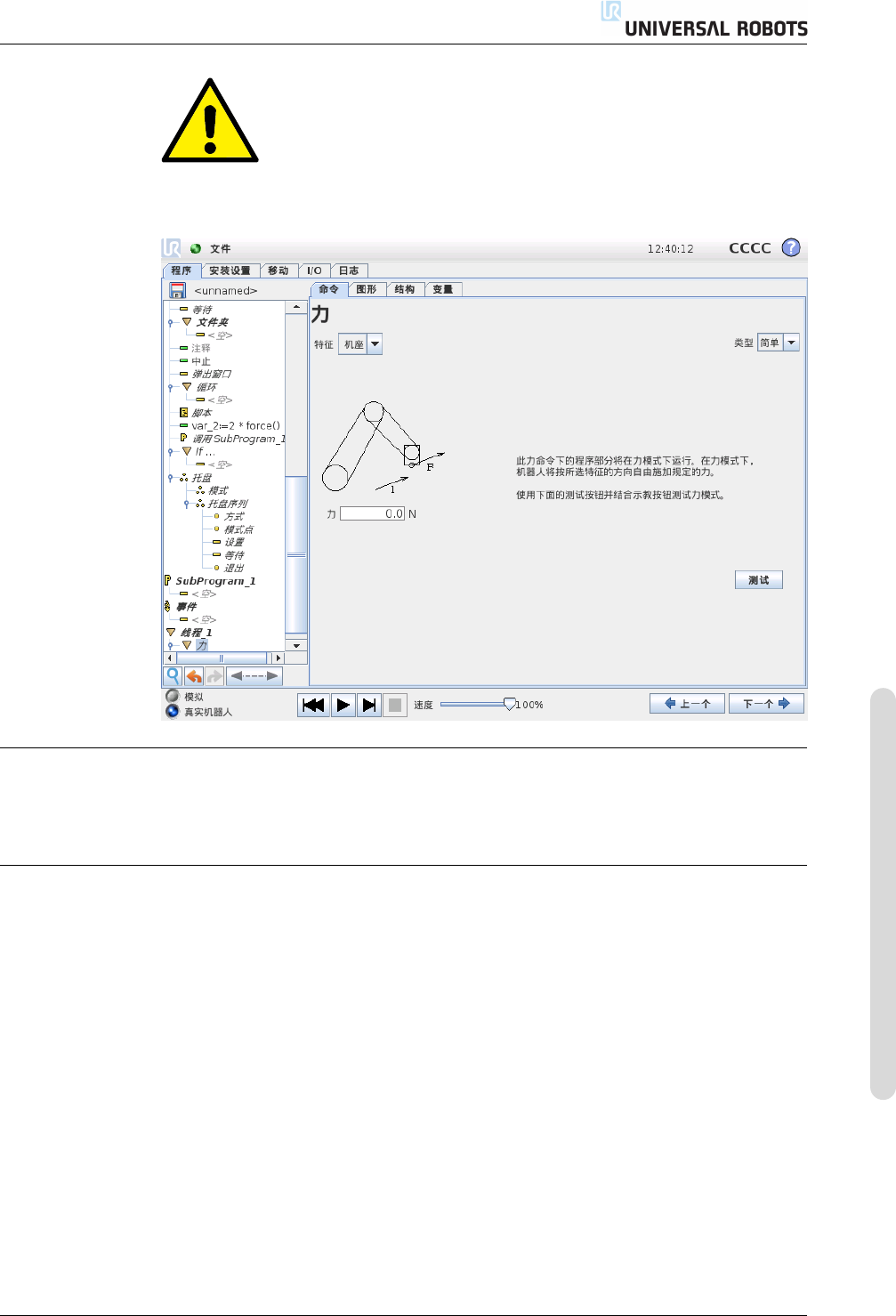
“力” 模式允许可选轴在机器人工作空间内具有柔顺性和力。在 “力” 命令下,机器
人手臂的所有移动都处于 “力” 模式。机器人手臂在力模式下移动时,可以选择一
个或多个轴为机器人手臂的柔性轴。机器人手臂将沿着/绕着柔性轴适应环境,也
就是说它将自动调节自身的位置以达到所需的力。也可以让机器人手臂自身对其环
境(如工件)施加一个力。
“力” 模式适用于沿预定轴的实际 TCP 位置不重要,但沿着该轴所需的力度必须达
到的情况。例如当机器人 TCP 应该在曲面上滚动时,或者当推动或拉动工件时。
“力” 模式还支持绕预定轴施加一定扭矩的情况。请注意,如果某个设置了非零力度
的轴没有遇到障碍物,机器人手臂将尝试沿着/绕着该轴加速。
即使某个轴已被选为柔性轴,但机器人程序仍将试图沿着/绕着该轴移动机器人。
但是,力控制会确保机器人手臂仍然施加接近规定的力值。
CB3 II-76 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
14.24 命令:力
警告:
如果力功能没有正确使用,会产生超过 150N 的力。风险评估时应
将设定的力考虑在内。
特征选择
“特征” 菜单用于选择机器人在力模式下工作时将使用的坐标系(轴)。菜单中的特
征为安装时所定义的特征,请参阅 13.12。
力模式类型
力模式有四种不同的类型,每种类型定义一种对所选特征的理解方式。
• 简单:在力模式下将只有一个柔性轴。沿着该轴的力可以调节。所需的力将始
终沿着所选特征的 z 轴施加。但是,对于 “直线” 特征,会沿着他们的 y 轴施
加力。
• 框架:框架类型可实现更高级的应用。在这里,所有六个自由度的柔顺性和力
都可以单独选择。
• 点:选择了 “点” 时,任务框架会让 y 轴从机器人 TCP 指向所选特征的起点。
机器人 TCP 与所选特征的起点之间的距离必须至少为 10 mm。请注意,运行
过程中任务框架将随着机器人 TCP 位置的变化而变化。任务框架的 x 轴和 z
轴取决于所选特征的原始方向。
• 运动:“运动” 表示任务框架将随 TCP 运动方向而变化。任务框架的 x 轴将是
TCP 移动方向投射到所选特征的 x 轴和 y 轴所决定平面上的投影。y 轴将垂
直于机器人手臂运动,并在所选特征的 x-y 平面内。此类型适用于沿复杂路径
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-77 CB3