UR5_User_Manual_zh_Global.pdf - 第84页
10.12 边界 每个限 制的 公差 和单位 列于 对应的 行末。 在运行 程序 时,机器 人手 臂的速 度将 自动 调 整,以 避 免 超 过 所 输 入 的值 减 去 公 差 之 值 (参 见 10.4 ) 。 请 注 意, 公 差值 所 示 的 负号只 是用 于表 明要从 实际 输入的 值中 减去公 差。但 是,如果 某些 关节的 角速 度超 过输入的值(无公差) ,安全系统将实施 0 类停机。 位置 范围 本屏 幕定 义了每 个…
10.11 关节限制
负号只是用于表明要从实际输入的值中减去公差。如果机器人手臂超过限制(无公
差),安全系统将实施 0 类停机。
警告:
速度限制只适用机器人 TCP,因此机器人手臂的其他部分可以比
定义值更快的速度移动。
切换至基本设置 按下基本设置... 按钮,切换至一般限制基本设置屏幕,此时所有
一般限制都会重置为默认值。如果该操作会导致定制数值丢失,则会跳出对话框要
求确认。
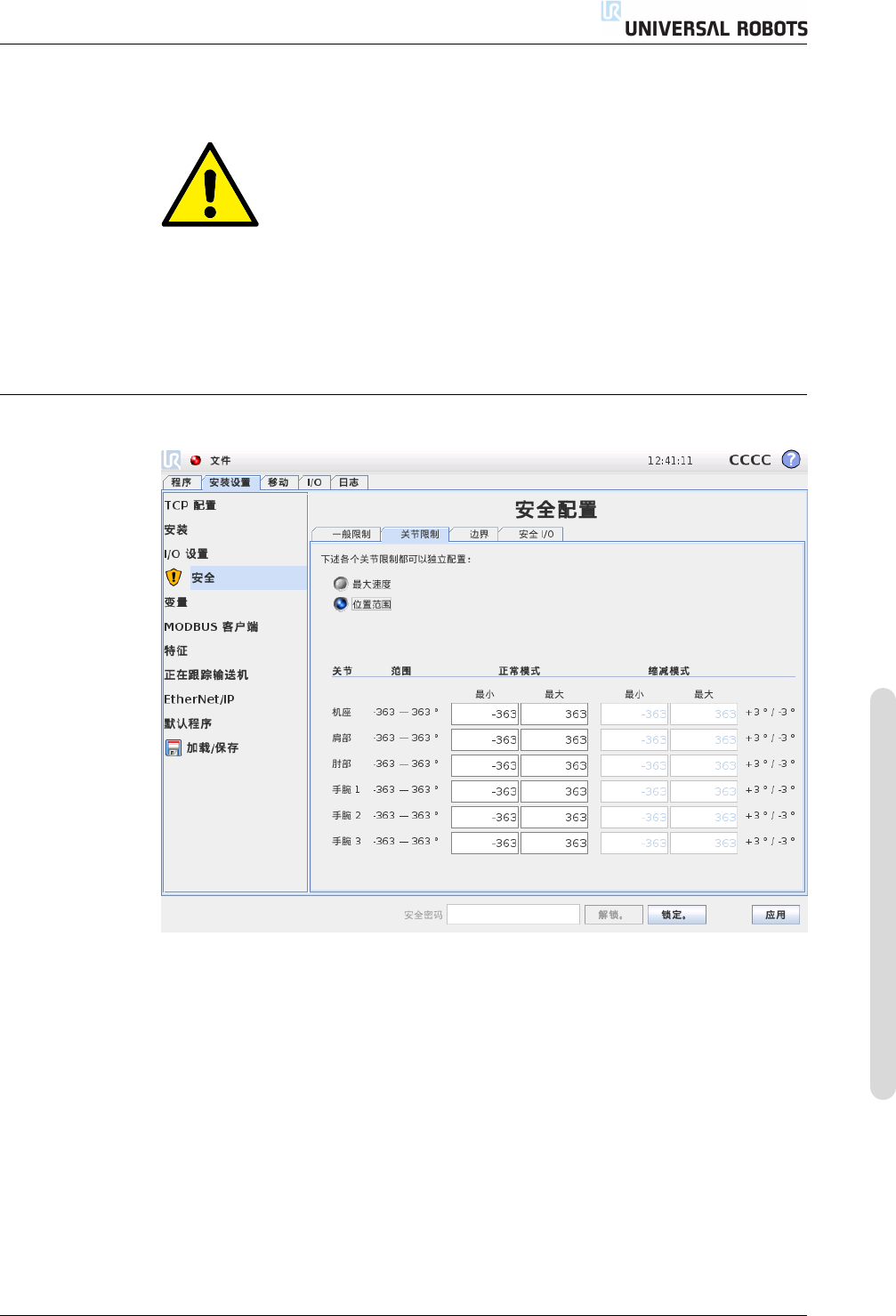
10.11 关节限制
关节限制对每个关节在关节空间的运动进行限制,即关节限制指的不是笛卡尔空间,
而是关节内部(旋转)位置和旋转速度。次面板上部的无线电按钮实现了对最大速
度和位置范围的独立设置。
在自由驱动模式下(详见 13.1.5),且某一关节的当前位置或速度接近限制时,用户
会感觉到一股反抗力,该反抗力随着关节接近限制值而增大。关节速度约在速度限
制的 20
◦
/s 以内时或是关节位置约在位置限制的 8
◦
以内时。
最大速度 本选项定义了每个关节的最大角速度。方法是点击文本域,然后输入一
个新的值。最大可接受值列于最大一栏中。所有值都不得小于公差值。
注意如果安全板和可配置输入都没有设置触发缩减模式,则缩减模式中的限制字段
会被禁用(详见 10.12和10.13)。此外,缩减模式的限制值不得高于对应的正常模式
限制值。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-9 CB3
10.12 边界
每个限制的公差和单位列于对应的行末。在运行程序时,机器人手臂的速度将自动
调整,以避免超过所输入的值减去公差之值(参见 10.4)。请注意,公差值所示的
负号只是用于表明要从实际输入的值中减去公差。但是,如果某些关节的角速度超
过输入的值(无公差),安全系统将实施 0 类停机。
位置范围 本屏幕定义了每个关节的位置范围。方法是点击对应的文本域并输入新
的关节位置上下限。输入的区间必须在范围这一栏以内,且下限不得大于上限。
注意如果安全板和可配置输入都没有设置触发缩减模式,则缩减模式中的限制字段
会被禁用(详见 10.12和10.13)。
每个限制的公差和单位列于对应的行末。第一个公差值应用于最小值,第二个公差
值应用于最大值。由于将第一个公差与输入的最小值相加,以及将第二个公差值与
输入的最大值相减,而导致关节位置即将超过此范围时,如果继续沿预测的轨迹移
动,程序将中止执行。请注意,公差值所示的负号只是用于表明要从实际输入的值
中减去公差。但是,如果关节位置超过输入的范围,安全系统将实施 0 类停机。
10.12 边界
你可以在该选项卡中对边界限制进行配置。边界限制由安全板及机器人工具方向的
最大允许偏离限制组成。还可以定义用于触发转化为缩减模式的平面。
强制使机器人 TCP 保持在被定义的板子的正确的一边,而不超过这些板子,通过
这一方法,安全板可用于限制机器人的允许工作空间。最多可配置 8 块安全板。工
具方向的限制可用于确保机器人工具方向与理想的方向的偏差不超过某一指定的数
量。
警告:
定义安全平面只限制 TCP,对机器人手臂的整体限制无影响。这
意味着虽然指定了安全平面,但并不保证机器人手臂的其他部分也
遵循该限制。
每一个 边界 限制都是 根据 当前机器 人安 装定义的 属性之一进 行配置的(请参
阅 13.12)。
注意:
强烈建议在编辑安全配置前,先创建配置所需的所有边界限制的所
有特征,并为其指定适当的名称。请注意,由于安全选项卡解锁后
将切断机器人手臂的电源,因此工具特征(包含机器人 TCP 的当
前位置和方向)以及自由驱动模式(参见 13.1.5)将不可用。
当机器人 TCP 处于 自由驱动 模式时(请参阅 13.1.5),其当前位置接近安全板,
或者机器人的方向与理想的方向之间的偏差接近某一指定的最大偏离值,那么随着
TCP 越来越接近该极限,用户会感受到一股不断增加的排斥力。这股力量在 TCP
位于安全板大约 5 厘米时产生,或者在工具方向的偏离值与指定的最大偏离值相差
大约 3
◦
时产生。
当一个平面被定义为触发器缩减模式平面,并且 TCP 超出此边界,安全系统将转
换为缩减模式,并应用缩减模式的安全设置。触发板与一般的安全板所遵循的规则
是相同的,只不过一般的安全板允许机器人手臂超出板子。
CB3 II-10 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。

10.12 边界
10.12.1 选择一个边界进行配置
安全边界控件位于选项卡左边,它是用来选择一个边界限制进行配置的。
按下控件中列出的 8 个条目之一就可对安全板进行设置。如果所选的安全平面已进
行配置,此平面相应的 3D 展示将在此面板右侧的 3D 视图(请参阅 10.12.2)中突
出显示。可在选项卡底部安全板属性这一部分对安全板进行设置(请参阅 10.12.3)。
按下工具边界条目对机器人工具边界限制方向进行配置。该边界可在选项卡底部的
安全边界属性这一部分加以说明(请参阅 10.12.4)。
按下 / 按钮来触发边界限制开/关的 3D 可视化效果。如果边界限制为活动
状态,安全模式(参见 10.12.3 和 10.12.4)将由以下的一个图标 / /
/ 指示。
10.12.2 3D 可视化效果
3D View 显示被配置的安全板,以及与机器人手臂当前位置相配的机器人工具的
方向边界限制。所有已配置的边界记录,包括在安全边界部分被选中可视化触发器
(即,有 标志),全都与当前所选的边界限制配合显示。
(激活)安全板是黄色和黑色的,且有一个小小的箭头表示该板子出于正常状态,
这表明机器人 TCP 允许放置在板子的这一边。触发器平面显示为蓝色和绿色。平
面一侧的小箭头表明不会触发向缩减模式的转变。如果位于选项卡左边控件中的安
全板被选中,那么相对应的 3D 展示会被高亮。
工具方向边界极限以锥体呈现,带一个矢量指示机器人工具的当前方向。锥体内部
代表允许的工具方向(矢量)。
当板子或者工具方向边界限制已配置但未被激活,可视化显示为灰色。
按放大镜图标可缩放视角,拖动手指图标可更改视角。
10.12.3 安全板配置
通过选项卡底部的安全板属性部分定义所选安全板的配置。选中的安全板位于选项
卡左上方的安全边界控件中。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-11 CB3