UR5_User_Manual_zh_Global.pdf - 第32页
4.3 安装 小心 : 如果机器人 泡在水中超过 一定时间,则可 能会遭受损害。 机器人不 应安装在水中或潮湿环境中。 工具 机器 人工具 法兰有 四个 M6 螺纹孔, 可用于 将工具 连接到 机器 人。这些 孔需 要以 9 N m 的力 紧固。如 果需 要非常 准确地 调整工 具位 置,还可 以钻 Ø 6 孔, 用销 加以固定。图 4.2 显示了钻孔位置和螺丝安装位置。 危险 : 1. 确保工具正确并安全地安装到位。 2. 确保工具安…
.
.4 机械接口
4.1 简介
本章将介绍安装机器人系统的各个部件时应注意的基本事项。务必遵循第 5章中的
电气安装说明。
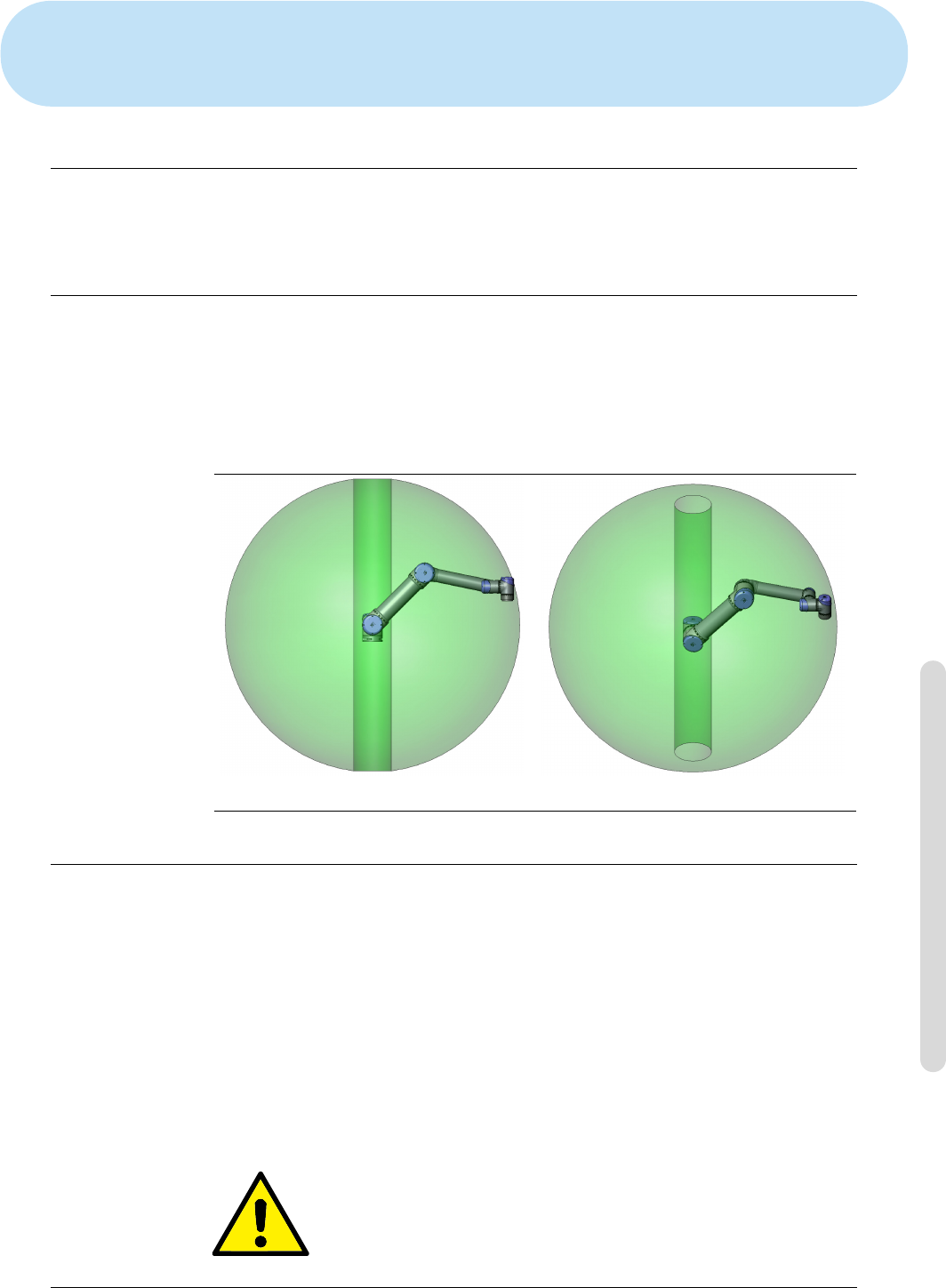
4.2 机器人工作空间
UR5 机器人的工作空间是指机座关节周围 850 mm 范围内的区域。选择机器人安装
位置时,务必考虑机器人正上方和正下方的圆柱体空间。尽可能避免将工具移向圆
柱体空间,因为这样会造成工具慢速运动时关节却运动过快,从而导致机器人工作
效率低下,风险评估难以进行。
正面 倾斜
4.3 安装
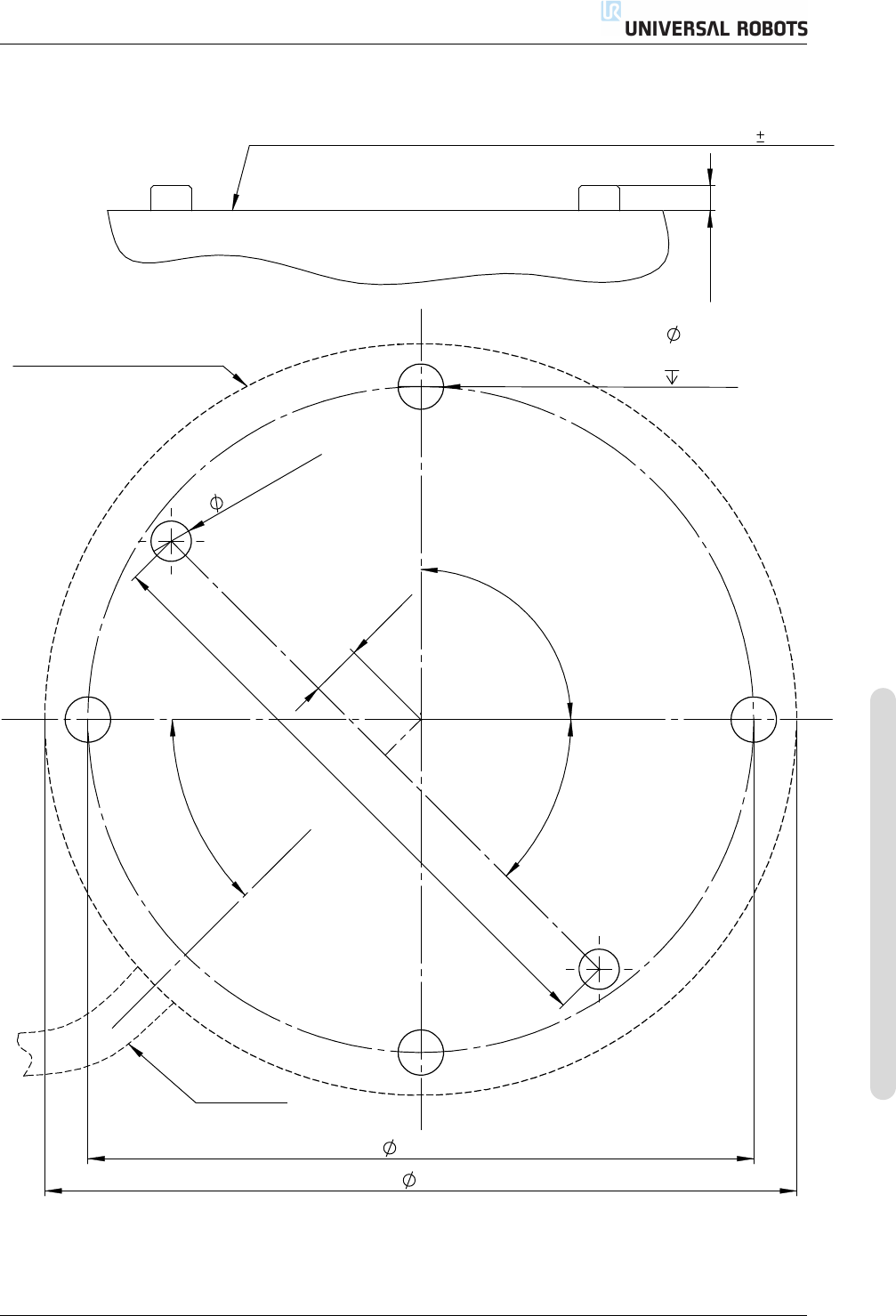
机器人手臂 使用 4 颗 M8 螺栓,通过机器人机座上的 4 个 8。5 mm 孔来安装机
器人手臂。建议以 20 N m 扭矩紧固这些螺栓。如果需要非常准确地调整机器人手
臂位置,还可以钻 2 个 Ø8 的孔,用销加以固定。也可采购精确的机座作为附件来
使用。图 4.1显示了钻孔位置和螺丝安装位置。
将机器人安装在一个坚固的表面,该表面应当足以承受至少 10 倍的机座关节的完
全扭转力,以及至少 5 倍的机器人手臂的重量。此外,该表面应没有震动。
如果机器人安装在线性轴上或是活动的平台上,则活动性安装机座的加速度应很
低。高加速度会导致机器人停止,因为机器人会误以为撞到东西。
危险:
确保机器人手臂正确并安全地安装到位。安装表面必须是防震的。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
I-19 UR5/CB3
4.3 安装
小心:
如果机器人泡在水中超过一定时间,则可能会遭受损害。机器人不
应安装在水中或潮湿环境中。
工具 机器人工具法兰有四个 M6 螺纹孔,可用于将工具连接到机器人。这些孔需
要以 9 N m 的力紧固。如果需要非常准确地调整工具位置,还可以钻 Ø6 孔,用销
加以固定。图 4.2显示了钻孔位置和螺丝安装位置。
危险:
1. 确保工具正确并安全地安装到位。
2. 确保工具安全架构,不会有零件意外坠落造成危险。
控制箱 控制箱可悬挂在墙壁上,也可安放在地面上。控制箱每侧应保留 50 mm 的
空隙,以确保空气流通顺畅。额外安装支架可购买。
示教盒 示教盒可以悬挂在墙壁或控制箱上。示教盒的额外安装支架可购买。确保
大家不会踩到电缆。
危险:
1. 确保控制箱、示教盒和电缆不接触液体。潮湿的控制箱可导致
死亡。
2. 控制箱和示教盒不得暴露在灰尘或超出 IP20 等级的潮湿环境
下。密切注意存在传导性灰尘的环境。
UR5/CB3 I-20 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
4.3 安装
9
0
°
±
0
,
5
°
4
5
°
1
2
0
(2)
±0,
5
°
45°
±
0
,
5
1
0
(
4
)
±
0
,5
5 ±1
132 ±0,5
Outer diameter of robot
0.05mm
mounting flange
Surface on which the robot is fitted. It should be flat within
Cable exit
(
2
)
0
,
0
1
0
-
8
+
0
,
0
1
5
149
M
8
1
2
(
4
)
8
.
5
O
R
图 4.1: 机器人安装孔。使用 4 颗 M8 螺栓。所有测量值均以 mm 为单位。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
I-21 UR5/CB3