UR5_User_Manual_zh_Global.pdf - 第151页
14.24 命令:力 警告 : 如果力功能没有 正确使用,会产生超 过 150 N 的力。 风险评估时应 将设定的力考虑在内。 特征选择 “ 特征 ” 菜 单用 于 选择 机 器人 在 力模 式 下工 作 时将 使 用的 坐 标系 (轴) 。菜 单 中的 特 征为安装时所定义的特征,请参阅 13.12 。 力模式类型 力模式有四种不同的类型,每种类型定义一种对所选特征的理解方式。 • 简单 :在 力模式下将 只有一个 柔性轴。沿 着该轴…
14.24 命令:力
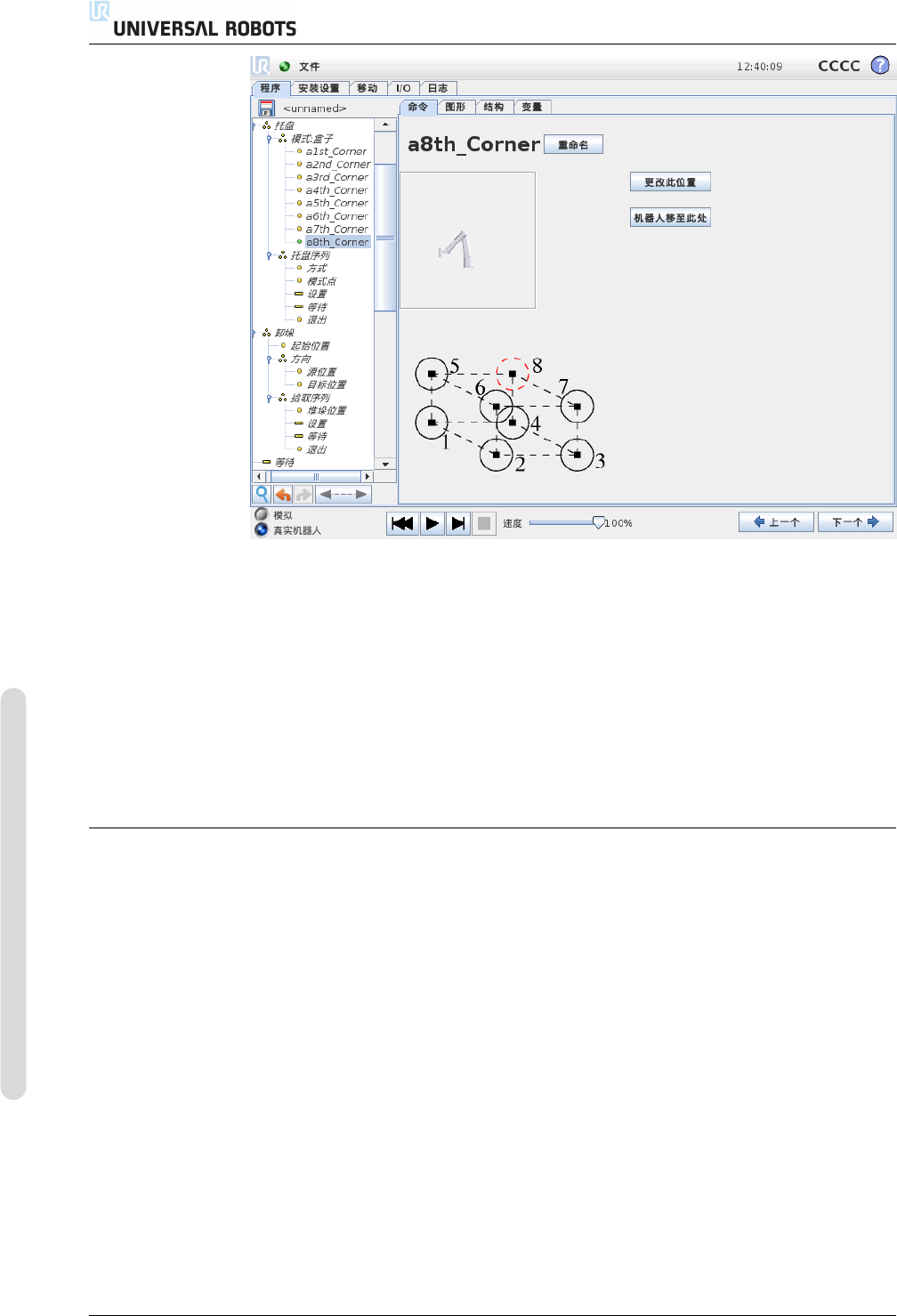
“盒子” 模式使用三个矢量定义盒子的边。这三个矢量由四个点确定,第一个矢量
从点一至点二,第二个矢量从点二至点三,第三个矢量从点三至点四。每个矢量按
输入的间隔计数进行划分。模式中的具体位置只需按比例添加间隔矢量即可计算得
出。
“直线” 和 “方块” 模式的原理方式与此类似。
机器人经过各个模式位置,程序会使用一个计数变量。您可在模式命令屏幕中看到
这个变量的名称。变量从数字 0 一直循环增加至 X ∗ Y ∗ Z − 1(模式中的点数)。
此变量可通过赋值命令进行操作,并可在表达式中使用。
14.24 命令:力
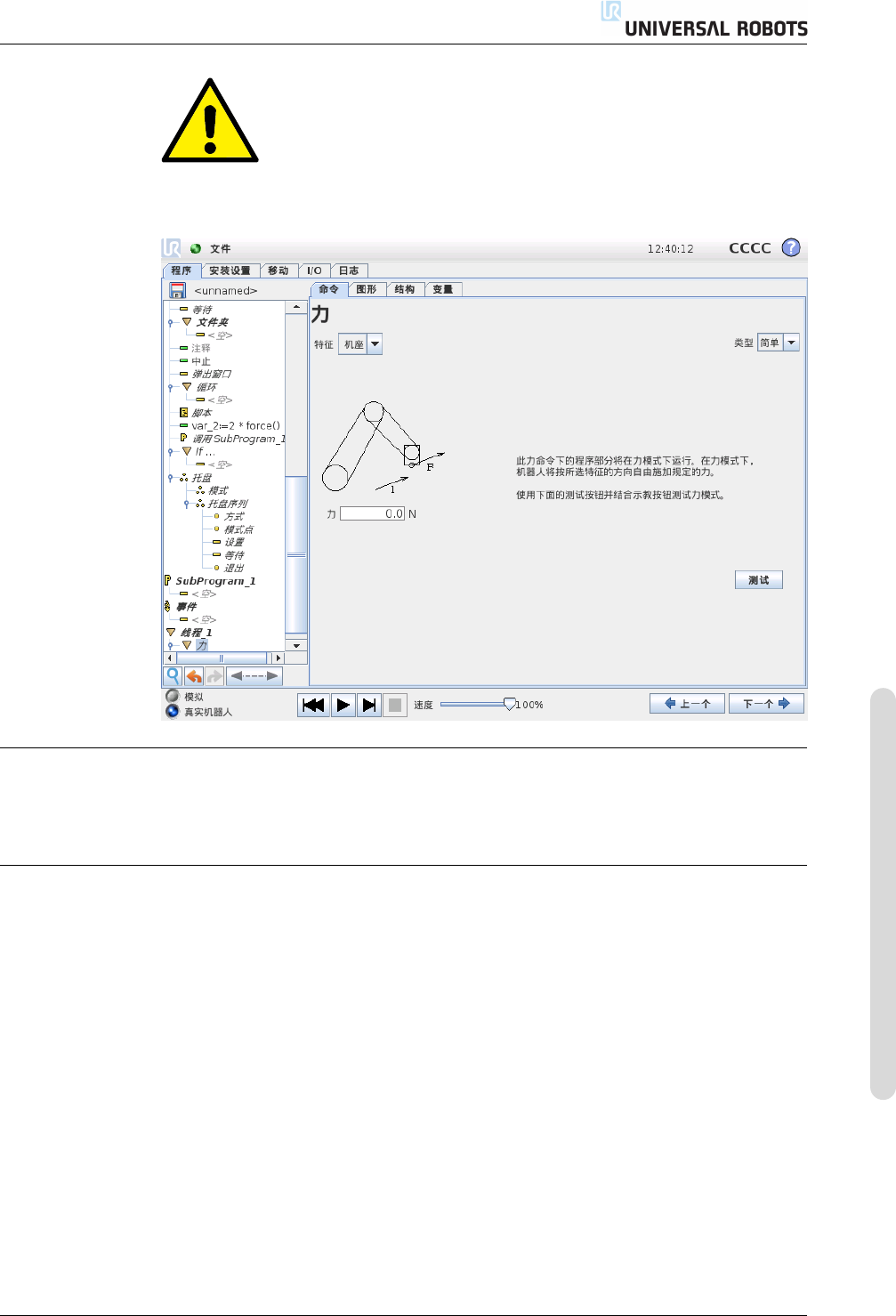
“力” 模式允许可选轴在机器人工作空间内具有柔顺性和力。在 “力” 命令下,机器
人手臂的所有移动都处于 “力” 模式。机器人手臂在力模式下移动时,可以选择一
个或多个轴为机器人手臂的柔性轴。机器人手臂将沿着/绕着柔性轴适应环境,也
就是说它将自动调节自身的位置以达到所需的力。也可以让机器人手臂自身对其环
境(如工件)施加一个力。
“力” 模式适用于沿预定轴的实际 TCP 位置不重要,但沿着该轴所需的力度必须达
到的情况。例如当机器人 TCP 应该在曲面上滚动时,或者当推动或拉动工件时。
“力” 模式还支持绕预定轴施加一定扭矩的情况。请注意,如果某个设置了非零力度
的轴没有遇到障碍物,机器人手臂将尝试沿着/绕着该轴加速。
即使某个轴已被选为柔性轴,但机器人程序仍将试图沿着/绕着该轴移动机器人。
但是,力控制会确保机器人手臂仍然施加接近规定的力值。
CB3 II-76 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
14.24 命令:力
警告:
如果力功能没有正确使用,会产生超过 150N 的力。风险评估时应
将设定的力考虑在内。
特征选择
“特征” 菜单用于选择机器人在力模式下工作时将使用的坐标系(轴)。菜单中的特
征为安装时所定义的特征,请参阅 13.12。
力模式类型
力模式有四种不同的类型,每种类型定义一种对所选特征的理解方式。
• 简单:在力模式下将只有一个柔性轴。沿着该轴的力可以调节。所需的力将始
终沿着所选特征的 z 轴施加。但是,对于 “直线” 特征,会沿着他们的 y 轴施
加力。
• 框架:框架类型可实现更高级的应用。在这里,所有六个自由度的柔顺性和力
都可以单独选择。
• 点:选择了 “点” 时,任务框架会让 y 轴从机器人 TCP 指向所选特征的起点。
机器人 TCP 与所选特征的起点之间的距离必须至少为 10 mm。请注意,运行
过程中任务框架将随着机器人 TCP 位置的变化而变化。任务框架的 x 轴和 z
轴取决于所选特征的原始方向。
• 运动:“运动” 表示任务框架将随 TCP 运动方向而变化。任务框架的 x 轴将是
TCP 移动方向投射到所选特征的 x 轴和 y 轴所决定平面上的投影。y 轴将垂
直于机器人手臂运动,并在所选特征的 x-y 平面内。此类型适用于沿复杂路径
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-77 CB3
14.24 命令:力
的去毛刺作业,此时需要一个垂直于 TCP 运动的力。请注意,当机器人手臂
不再移动时:如果在机器人手臂站立不动时进入力模式,在 TCP 速度高于零
之前将没有柔性轴。如果随后依然是在力模式下机器人手臂再次站立不动,任
务框架的方向与上一次 TCP 速度大于零时的方向相同。
对于后三种类型,当机器人正在力模式下工作时,实际任务框架可在运行时在图形
选项卡 (14.29) 上查看。
力值选择
力既可以为柔性轴设置也可以为非柔性轴设置,但效果不同。
• 柔性:机器人手臂将调节自身位置以达到所选的力。
• 非柔性:机器人手臂将遵循程序设置的自身轨迹,同时达到在此设置的外力
值。
对于平移参数,力的单位为牛顿 [N],对于旋转参数,扭矩单位为牛顿米 [Nm]。
限制选择
针对所有轴都可以设置一个限制,但是这些限制对于柔性轴和非柔性轴有不同的意
义。
• 柔性:限制为允许 TCP 沿/绕轴达到的最大速度。单位为 [mm/s] 和 [度/s]。
• 非柔性:限制为在安全停机之前允许机器人从程序轨迹的最大偏离。单位为
[mm] 和 [度]。
测试力设置
标有 “测试” 的开关按钮可将示教盒背面 “自由驱动” 按钮的行为从正常自由驱动模
式切换到测试力命令。
当 “测试” 按钮开启、示教盒背面的 “自由驱动” 按钮按下时,机器人将仿照程序已
达到此力命令的情况来进行工作。通过这一方法,可在实际运行完整程序之前验证
各项设置。这一可能性对验证柔性轴和力是否选择正确尤其有用。只需要用一只手
握住机器人 TCP,另一只手按 “自由驱动” 按钮,并注意机器人手臂能够/不能够
移动的方向。离开此屏幕时,“测试” 按钮会自动关闭,这意味着示教盒背面的 “自
由驱动” 按钮再次用于正常自由驱动模式。注意:仅当为 “力” 命令选择了有效的特
征时,“自由驱动” 按钮才有效。
CB3 II-78 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。