UR5_User_Manual_zh_Global.pdf - 第112页
13.6 安装设置 → TCP 配置 13.6.3 示教 TCP 位置 TCP 位置坐标可通过以下步骤自动计算: 1. 点击 位置 按钮。 2. 在机器人工作空间中选择一个固定的点。 3. 使用 屏幕 右侧 的按钮 将 TCP 从至少 三个 不同 角度 移至所 选的 点上, 并保 存工 具输出法兰的相应位置。 4. 验证计算所得的 TCP 坐标,并使用 设置 按钮将其设定到所选的 TCP 上。 请注 意,这些 位置 必须 足够多 样化,…
13.6 安装设置 → TCP 配置
13.6 安装设置 → TCP 配置
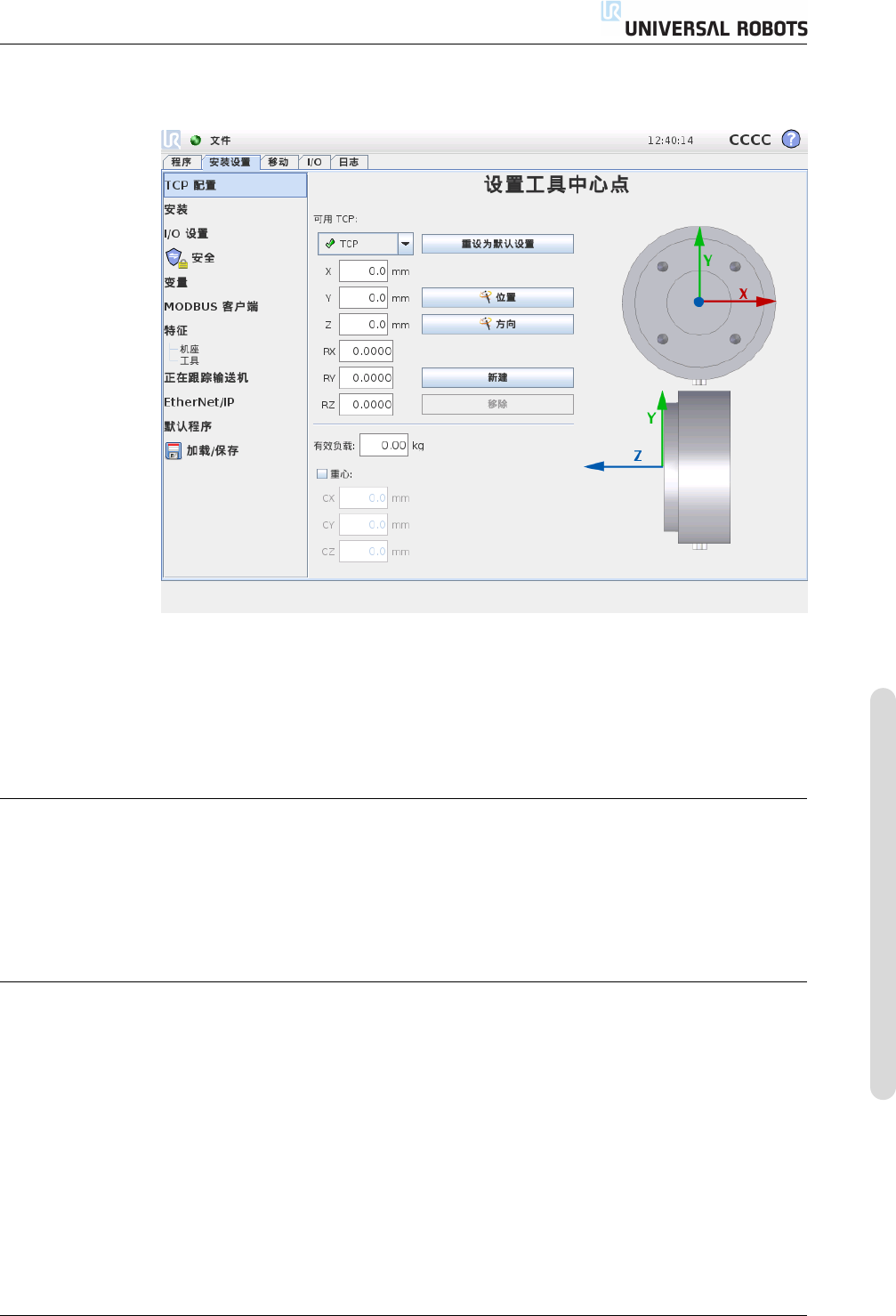
工具中心点(TCP)既机器人工具的特征点。多个指定的 TCP 可在此屏幕上定
义。每个 TCP 都包含相对于工具输出法兰中心而设定的转换和旋转,如屏幕上的
图形所示。位置坐标 X、Y 和 Z 决定了 TCP 的位置,而 RX、RY 和 RZ 决定了
其方向。当指定的值均为零时,TCP 与工具输出法兰的中心点重合,并应用屏幕右
侧显示的坐标体系。
13.6.1 添加、修改和删除 TCP
要定义新的 TCP,请点击新建按钮。所创建的 TCP 会自动获取一个唯一的名称,
并出现在下拉菜单中供选择。
所选 TCP 的转换和旋转可以通过点击相应的空白文本字段并输入新值来修改。
要删除所选的 TCP,只需点击删除按钮。最后一个剩余 TCP 无法删除。
13.6.2 默认和激活的 TCP
严格来说,所配置的 TCP 中有一个是默认 TCP。在 TCP 下拉菜单中,默认 TCP
的名称左侧有一个绿色图标。要将当前所选的 TCP 设为默认 TCP,点击设为默认
按钮。
总有一个 TCP 偏移用作激活的 TCP 偏移,来决定笛卡尔空间中的所有线性运动。
此外,用户可在 “图形” 选项卡(参见 14.29)上观看激活 TCP 的运动。在程序运
行前,以及在程序启动前,先将默认 TCP 设为激活的 TCP。在程序中,任何指定
TCP 都可设为激活的 TCP 用于机器人的特别移动(参见 14.5和14.10)。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-37 CB3
13.6 安装设置 → TCP 配置
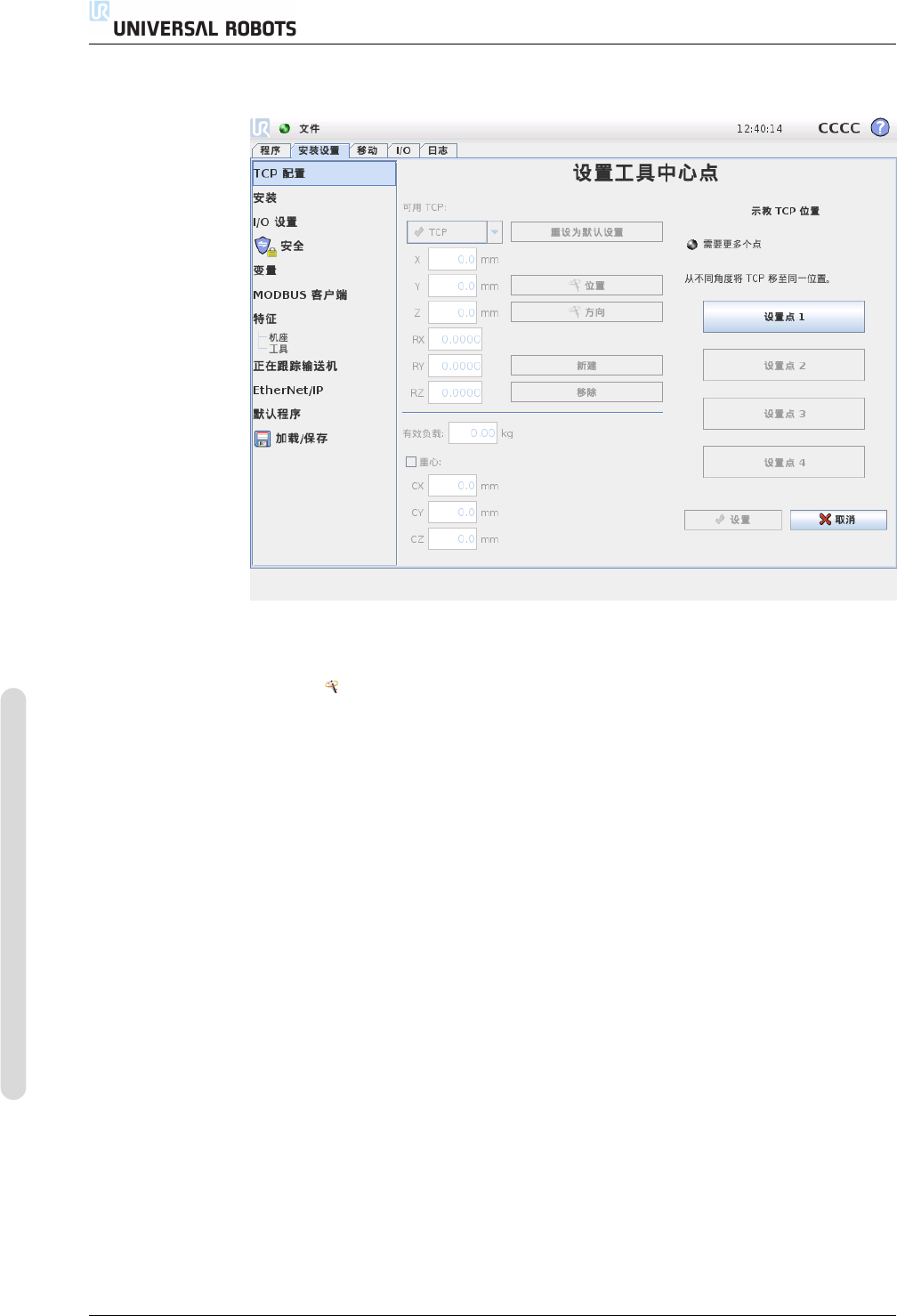
13.6.3 示教 TCP 位置
TCP 位置坐标可通过以下步骤自动计算:
1. 点击 位置按钮。
2. 在机器人工作空间中选择一个固定的点。
3. 使用屏幕右侧的按钮将 TCP 从至少三个不同角度移至所选的点上,并保存工
具输出法兰的相应位置。
4. 验证计算所得的 TCP 坐标,并使用设置按钮将其设定到所选的 TCP 上。
请注意,这些位置必须足够多样化,以确保计算结果正确。否则,按钮上方的状态
LED 将变为红色。
此外,即使通常只要三个位置便足可确定正确的 TCP,但仍然需要使用第四个位置
来进一步验证计算结果正确。每个为计算所得 TCP 保存的点的质量通过相应按钮
上的 LED 为绿色、黄色还是红色来指示。
CB3 II-38 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
13.6 安装设置 → TCP 配置
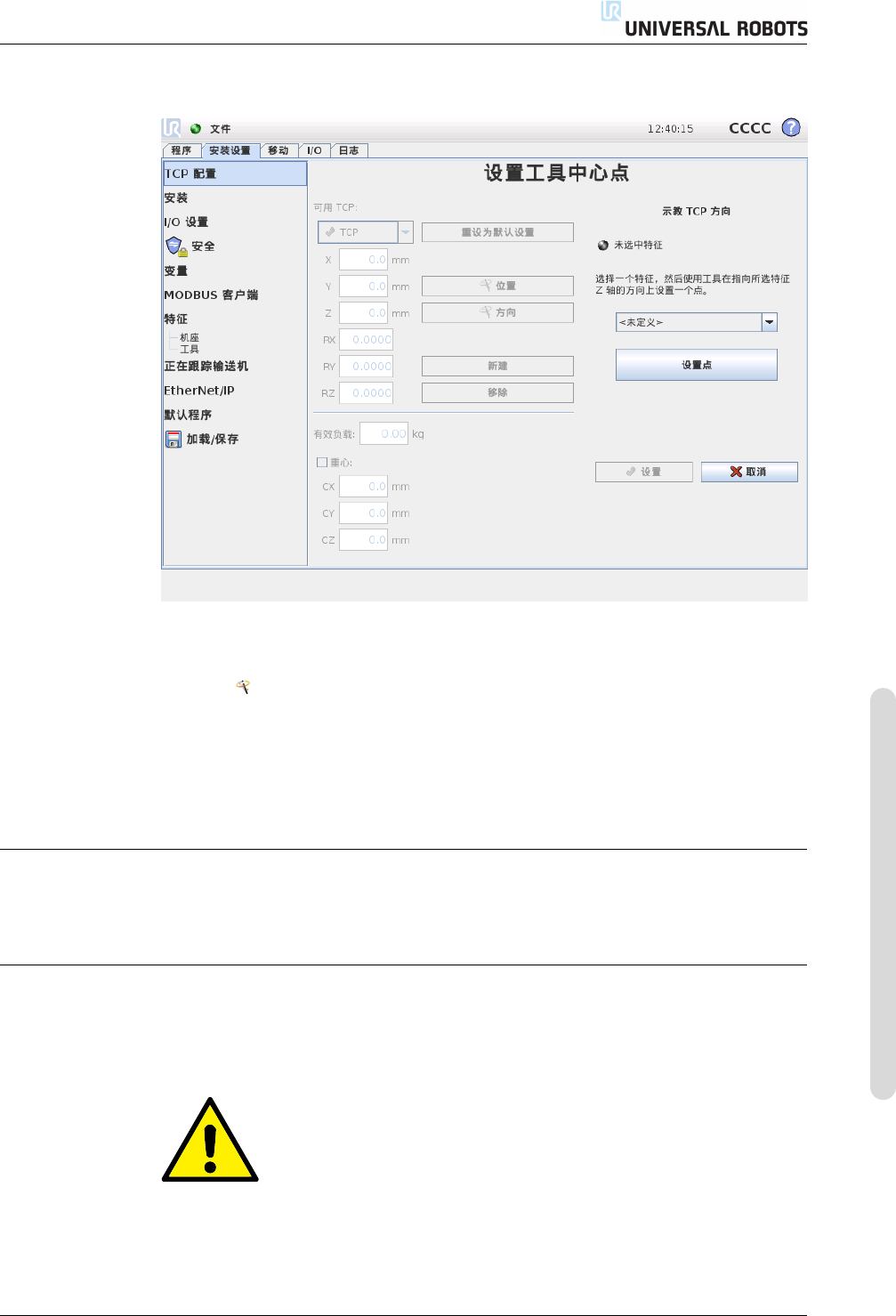
13.6.4 示教 TCP 方向
TCP 方向可通过以下步骤自动计算:
1. 点击 方向按钮。
2. 从下拉列表中选择一个特征。关于如何定义新特征的详细信息,请参见 13.12。
3. 使用下面的按钮移至工具相对于 TCP 的方向与所选特征的坐标体系一致的点
上。
4. 验证计算所得的 TCP 方向,并使用设置按钮将其设定到所选的 TCP 上。
13.6.5 负载
机器人工具重量在屏幕的下半部分指定。要更改此设置,只需点击空白文字字段并
输入新值。所作设置将应用于所有指定的 TCP。
13.6.6 重心
工具重心可以使用字段 CX、CY 和 CZ 来指定。如果未进行指定,工具中心点将
被指定为工具的重心。所作设置将应用于所有指定的 TCP。
警告:
务必使用正确的安装设置。与程序一起保存并加载安装设置文件。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-39 CB3