UR5_User_Manual_zh_Global.pdf - 第98页
11.5 初始化屏幕 11.5 初始化屏幕 在此屏幕上,您可以控制机器人手臂的初始化。 机器人手臂状态指示 状态 LED 指示机器人手臂的运动状态: • 红色高亮 LED 指示机器人手臂目前处于停止状态,停止原因有多种。 • 黄色高亮 LED 指示机器人手臂开启,但尚未准备好进行正常操作。 • 绿色高亮 LED 指示机器人手臂开启,且准备好进行正常操作。 LED 旁的文字进一步说明了机器人手臂的当前状态。 有效负载和安装设置 机器 人 …
11.4 欢迎屏幕
动屏幕,在此屏幕中可以移动机器人手臂。同理,若选择 I/O 选项卡,可以监控和
更改电气 I/O 的当前状态。
控制箱或示教盒也可以连接鼠标和键盘,不过,实际上无此必要。几乎所有文本字
段都启用了触控功能,因此触摸它们可以打开一个屏幕小键盘或键盘。不可触控的
文本字段旁会有一个编辑器图标,可以打开相关的输入编辑器。
屏幕小键盘、键盘和表达式编辑器图标如上图所示。
有关 PolyScope 的各个屏幕,将在后续章节详细介绍。
11.4 欢迎屏幕
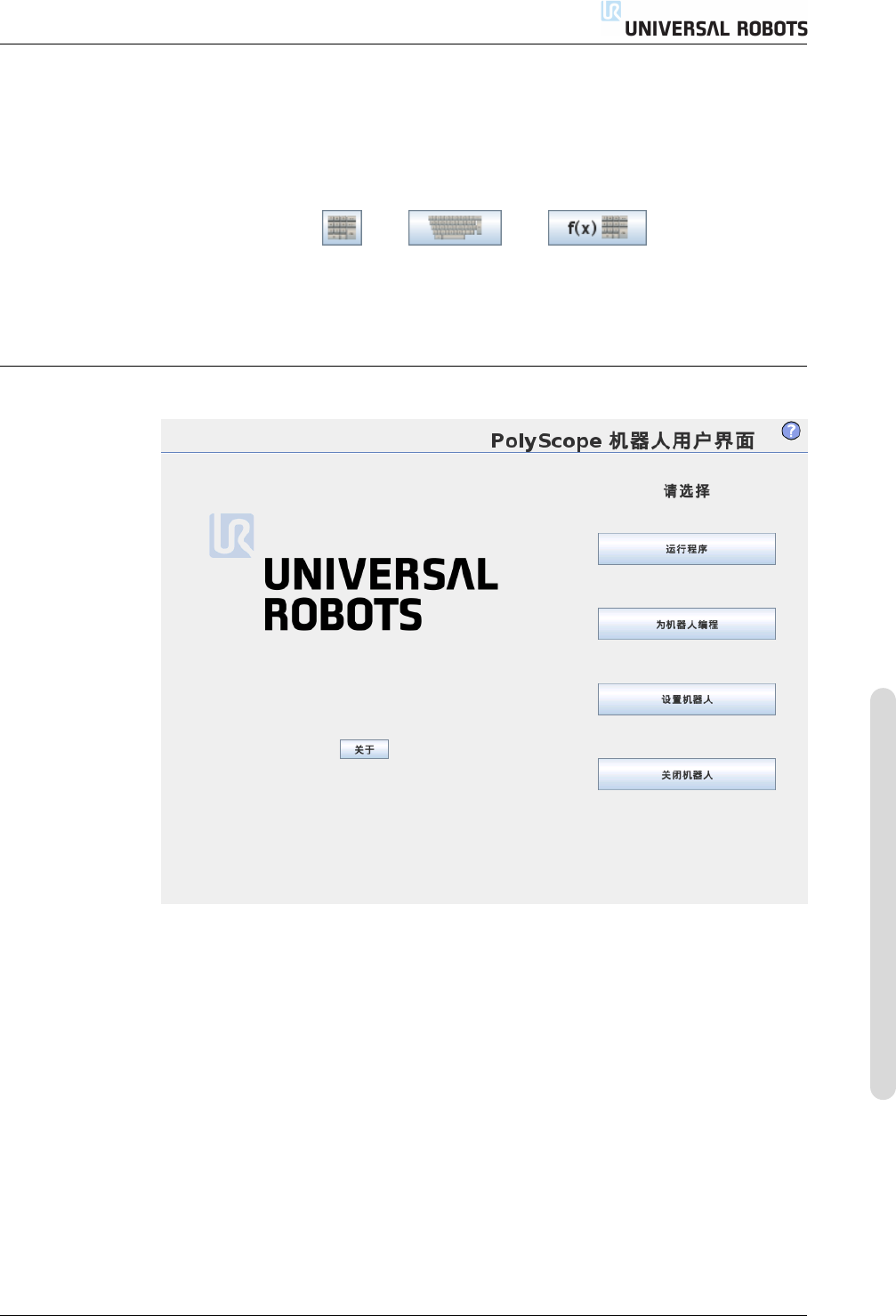
启动控制器 PC 后,将显示欢迎屏幕。此屏幕提供以下选项:
• 运行程序:选择并运行已有程序。这是操作机器人手臂和控制箱最便捷的方
式。
• 为机器人编程:修改程序或创建新程序。
• 设置机器人:更改语言、设置密码、升级软件等
• 关闭机器人:关闭机器人手臂的电源,关闭控制箱。
• 关于:提供有关软件版本的详情、主机名、IP 地址、序列号和法律信息。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-23 CB3
11.5 初始化屏幕
11.5 初始化屏幕
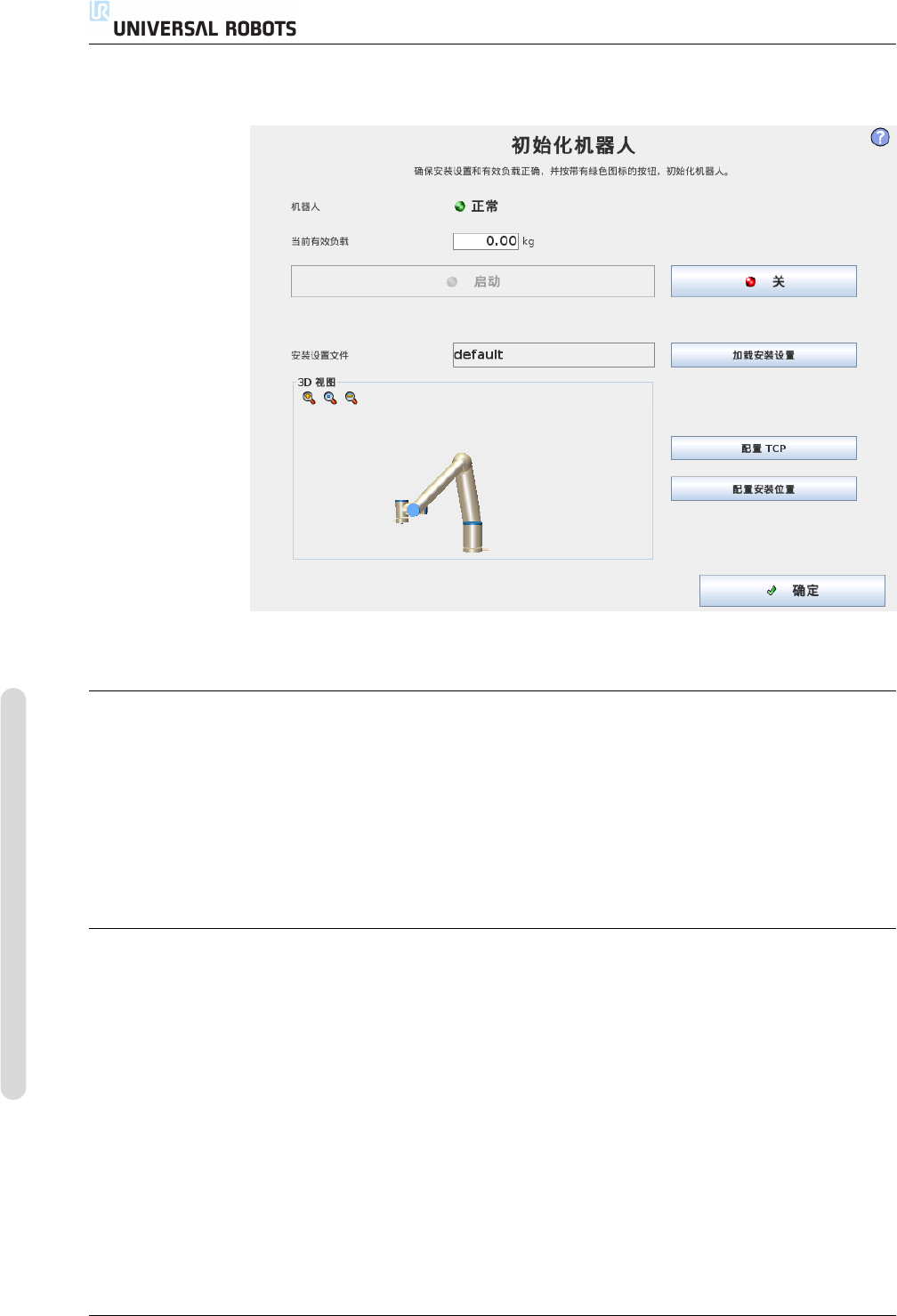
在此屏幕上,您可以控制机器人手臂的初始化。
机器人手臂状态指示
状态 LED 指示机器人手臂的运动状态:
• 红色高亮 LED 指示机器人手臂目前处于停止状态,停止原因有多种。
• 黄色高亮 LED 指示机器人手臂开启,但尚未准备好进行正常操作。
• 绿色高亮 LED 指示机器人手臂开启,且准备好进行正常操作。
LED 旁的文字进一步说明了机器人手臂的当前状态。
有效负载和安装设置
机器人手臂开启时,控制器控制机器人手臂的有效负载显示在白色小文本字段中。
更改值的方法是,点击文本域,然后输入一个新的值。请注意,设置该值不会变更
机器人手臂安装设置中的负载(详见 13.6),只会变更控制器使用的有效负载。
同样地,当前加载的安装文件名称显示在灰色的文本字段中。点击文本字段或点击
该字段旁边的加载按钮就可以加载不同的安装设置。另外,加载的安装设置可以通
过屏幕下方的 3D 视图旁的按钮进行定制。
在启动机器人手臂之前,务必验证有效负载和有效安装设置与机器人手臂的当前状
态匹配。
CB3 II-24 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
11.5 初始化屏幕
初始化机器人手臂
危险:
启动机器人手臂时,总是验证实际负载和实际安装设置正确。如果
设置错误,机器人手臂和控制箱将无法正常工作,并会对周围的人
或设备造成危险。
小心:
如果机器人手臂碰到障碍物或桌子应格外小心,因为撞上障碍物会
导致关节齿轮箱损坏。
带绿色图标的大按钮是用于对机器人手臂进行实际初始化的。上面的文字,以及其
进行的操作,都会根据机器人手臂的当前状态变化。
• 控制器 PC 启动后,按下该按钮一次以启动机器人手臂。机器人手臂状态会显
示开启,随后显示空闲。请注意,如果遇到紧急停止,机器人手臂不会启动,
因此该按钮也被禁用。
• 如果机器人手臂状态是空闲,需再次点击该按钮以启动机器人手臂。在此,感
应器数据会根据配置的机器人手臂安装数据进行核对。如果出现不匹配(公差
为 30
◦
), 则该按钮会被禁用,按钮下方会显示错误信息。
通过安装验证后,点击该按钮将释放所有关节制动器,之后机器人手臂就准备
好进行正常操作。注意,释放制动器时,机器人会发出声音并移动少许位置。
• 如果机器人手臂启动后违反了某一安全限制,则会进入恢复模式。在该模式
下,点击该按钮将切换至恢复移动屏幕,在该屏幕可以将机器人手臂移动至安
全限制内。
• 如果出现故障,可以使用该按钮重启控制器。
• 如果控制器当前未运行,点击该按钮启动控制器。
最后,带红色图标的较小按钮用于关闭机器人手臂。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-25 CB3