UR5_User_Manual_zh_Global.pdf - 第148页
14.22 命令:开关 14.21 命令:线程 线 程 是 机 器 人 程 序 的 一 个 并 行 进 程。 线 程 可 用 于 控 制 与 机 器 人 手 臂 无 关 的 外 部 机 器。线程可以通过变量和输出信号和机器人程序进行通信。 14.22 命令:开关 CB3 I I-74 版本 3.2 (rev. 18629) . . 版权所有 © 2009-2015 Universal Rob ots A/S 。保留所有权利。
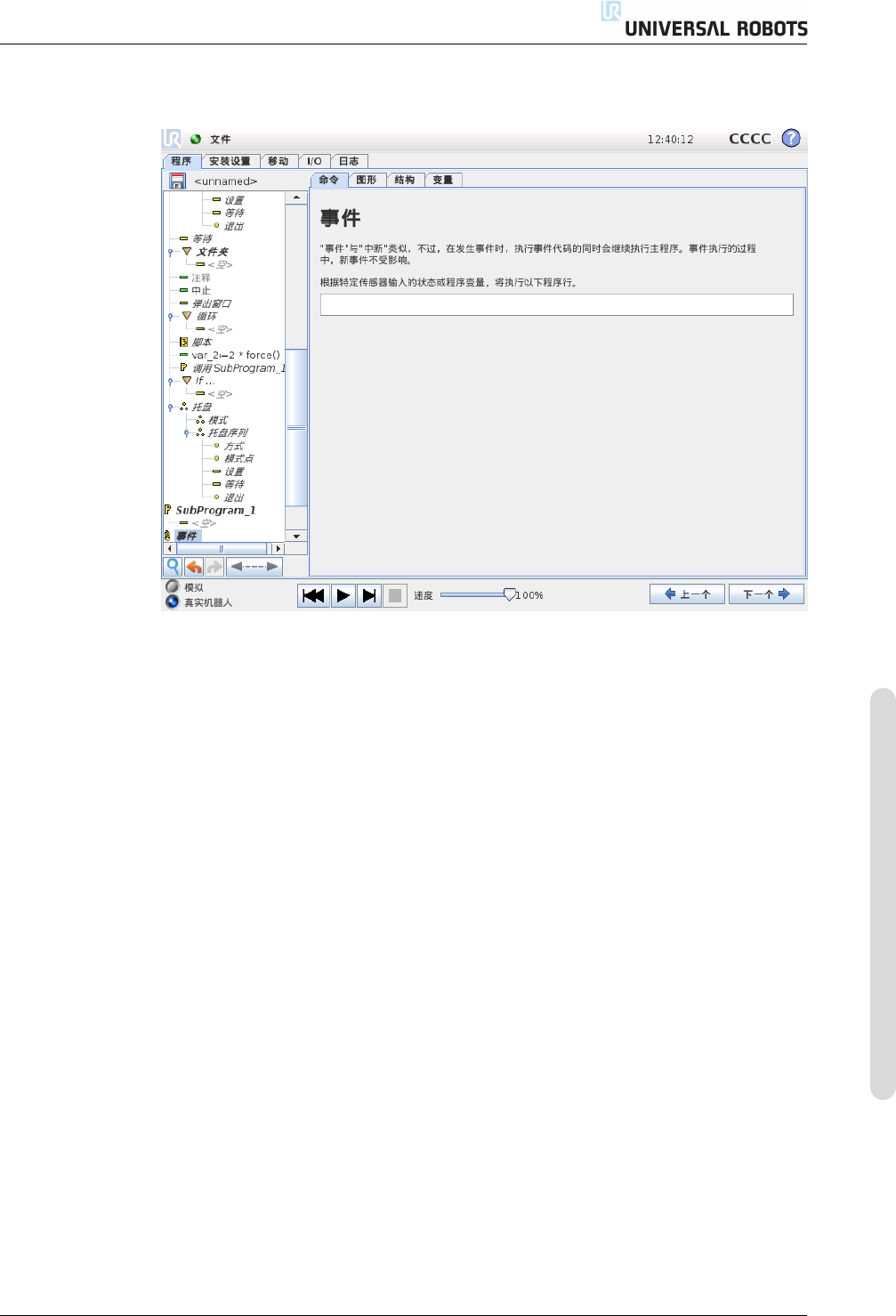
14.20 命令:事件
14.20 命令:事件
“事件” 命令可用于监控输入信号,以及在输入信号呈高电平时执行某个动作或设置
变量。例如,当输出信号呈高电平时,事件程序可等待 200ms,然后将其重新设置
为低电平。这样,如果外部机器上的触发机制是上升沿而非高输入电平时,主程序
代码要简单得多。每个控制循环 (8ms) 对事件进行一次检查。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-73 CB3
14.22 命令:开关
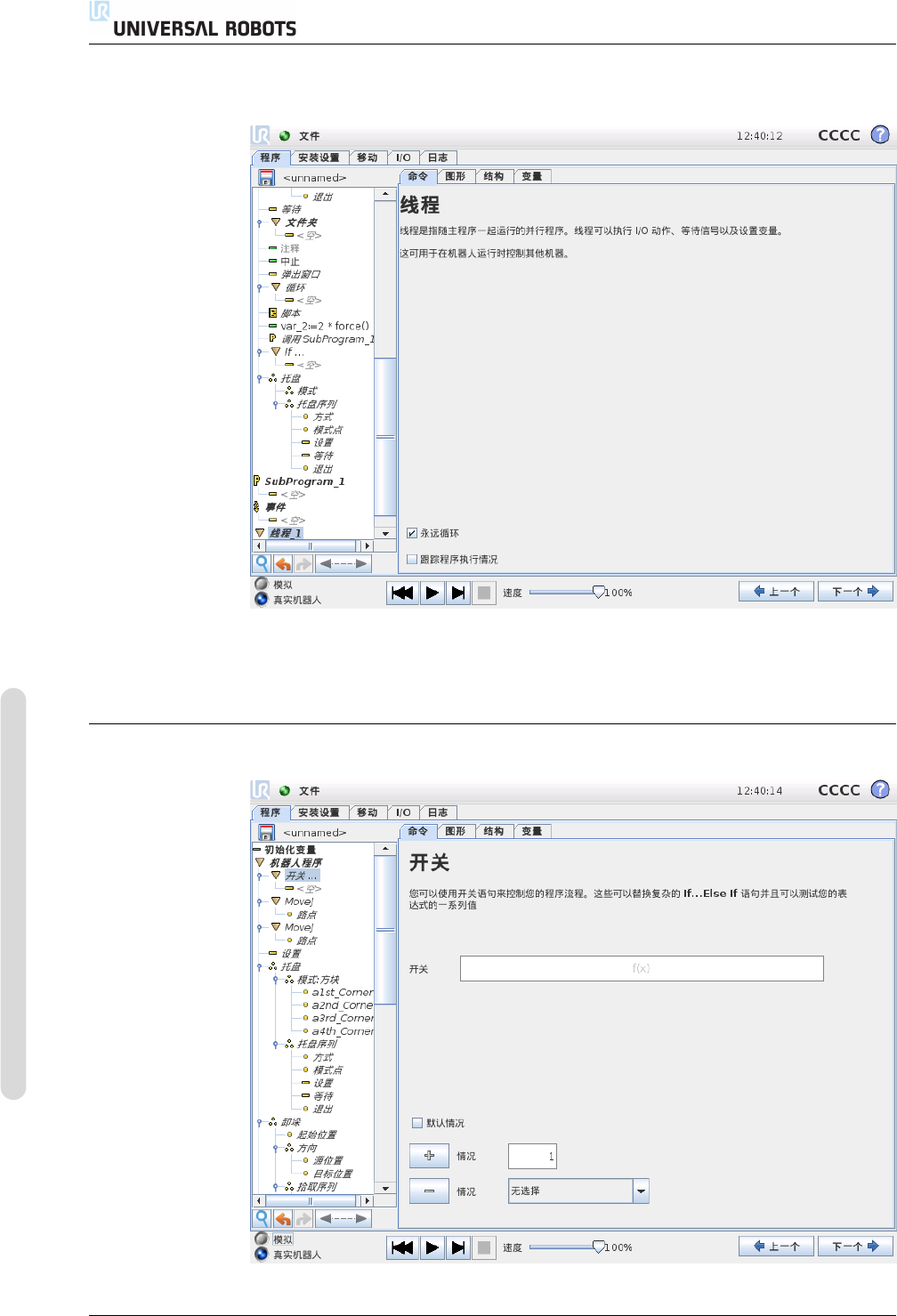
14.21 命令:线程
线程是机器人程序的一个并行进程。线程可用于控制与机器人手臂无关的外部机
器。线程可以通过变量和输出信号和机器人程序进行通信。
14.22 命令:开关
CB3 II-74 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
14.23 命令:模式
“开关情况” 结构可以指示机器人根据传感器输入或变量值来改变其行为。使用表达
式编辑器可描述基本条件并定义机器人应继续执行此开关命令的子命令的情况。如
果条件被评估为匹配其中一种情况,则执行情况命令内的行。如果默认情况命令已指
定,那么只有当没有找到其他匹配的情况时,行才会被执行。
每个开关命令可以包含多个情况命令和一个默认情况命令。开关命令只能有一种情况,
那就是任何情况值都已定义。情况命令可使用屏幕上的按钮添加。情况命令可从该开
关屏幕上移除。
14.23 命令:模式
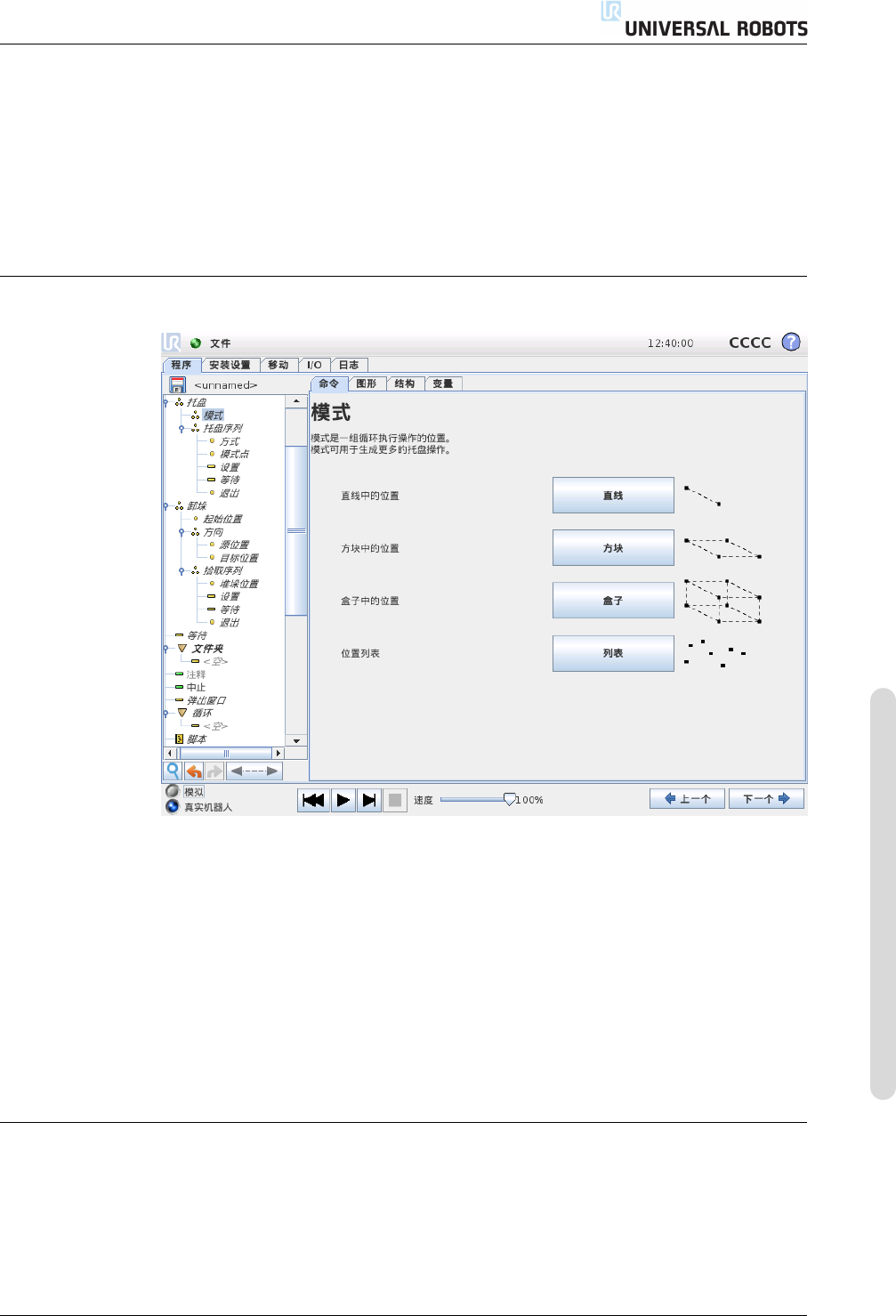
“模式” 命令可用于在机器人程序中指示机器人循环通过各个位置。每次执行 “模
式” 命令时,其均与一个位置相对应。
模式可分为四种类型。前三种分别是 “直线”、“方块” 和 “盒子”,这三种可用于表
示符合正规模式的位置。正规模式通过定义模式各边的多个特征点来定义。“直线”
模式由两个端点来确定,“方块” 模式由四个角点中的三个角点来确定,“盒子” 由
八个角点中的四个角点来确定。编程员输入沿模式每条边的位置数量。然后,机器
人控制器通过按比例添加矢量来计算各个模式位置。
如果要经过的位置不属于正规模式,可以选择 “列表” 选项,编程员可在其中指定
包含所有位置的位置列表。通过此方式,可以实现各种位置排列。
定义模式
选择 “盒子” 模式时,屏幕将变成如下图所示。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-75 CB3