UR5_User_Manual_zh_Global.pdf - 第77页
. . 10 安全配置 10.1 简介 机器人 有一 套高 级安全 系统。 根据机 器人 工作空 间的 特殊 特征,安 全系 统的设 置必 须在确 保机 器人周 边的 所有人 员和 设备安 全的 情况下 进行 配置。应 用风 险评估 定义 的设置是集成商必须做的第一件事。有关安全系统的详情,参见 硬件安装手册。 危险 : 1. 安 全 相 关 功 能 和 界 面 的 使用 和 配 置 必 须 根 据集 成 商 针 对 特 定 机器人应用…
.
.10 安全配置
10.1 简介
机器人有一套高级安全系统。根据机器人工作空间的特殊特征,安全系统的设置必
须在确保机器人周边的所有人员和设备安全的情况下进行配置。应用风险评估定义
的设置是集成商必须做的第一件事。有关安全系统的详情,参见 硬件安装手册。
危险:
1. 安全相关功能和界面的使用和配置必须根据集成商针对特定
机器人应用而执行的风险评估来完成,参见 硬件安装手册。
2. 设置和示教的安全配置设置必须根据集成商执行的风险评估
来应用,应在机器人手臂第一次通电之前进行。
3. 所有可以在屏幕及其子选项卡上访问的安全配置设置都必须
根据集成商执行的风险评估进行。
4. 集成商需确保所有安全配置设置的更改都是依据集成商自己
的风险评估进行的。
5. 集成商必须防止未授权人员更改安全配置,比如通过使用密
码保护。
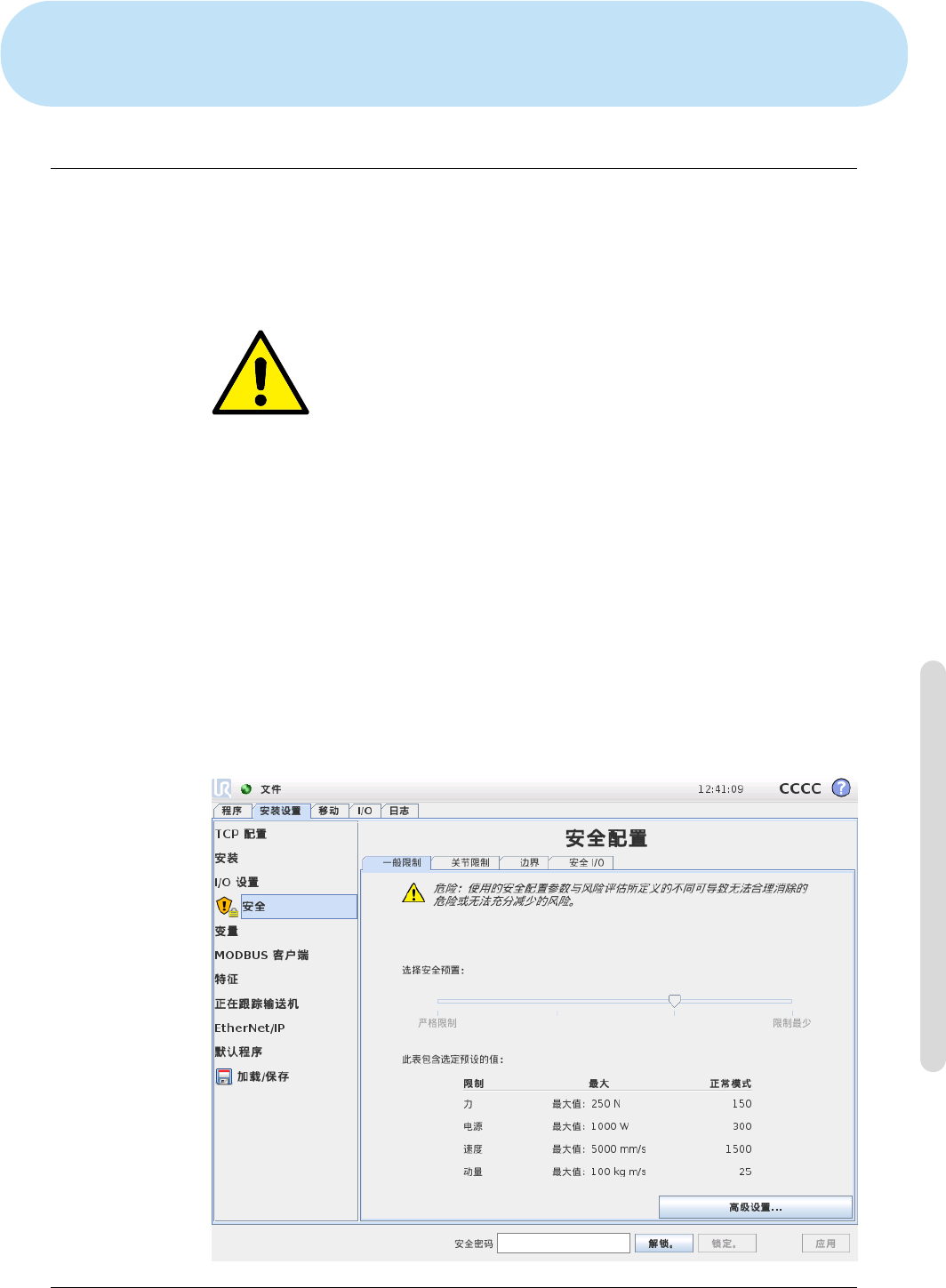
按机器人编程按钮,选择安装选项卡,并按一下安全,即可从欢迎屏幕(参见 11.4)
访问安全配置屏幕。安全配置有密码保护,请参见 10.8。
版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。
II-3 CB3
10.3 安全同步和错误
安全设置包含许多用于限制机器人手臂的活动的限制值,还包含许多可配置输入和
输出的安全功能设置。它们的定义在安全屏幕的下列子选项卡中:
• 一般限制子选项卡定义了机器人手臂的最大力、功率、速度以及动量 。当机器
人手臂击中人或与环境的某一部分互撞的风险非常高时,这些设置需设置为低
值。如果风险较低,更高的一般限制可使机器人活动得更快,对环境施加更大
的力。了解更多详情,请参阅 10.10 。
• 关节限制子选项卡包括关节速度和关节位置限制。关节速度限制指的是每个
关节的最大角速度,这一限制用于进一步限制机器人手臂的速度。关节位置
限制指的是每个关节允许的位置范围(在接点空间内)。了解更多详情,请参
阅 10.11 。
• 边界子选项卡指的是机器人 TCP 的安全板(在科特尔空间内)和工具方向边
界。安全平面既可以配置为机器人 TCP 位置的硬限制,也可以配置为用于激
活缩减模式安全限制的触发器(参见 10.6)。工具方向边界为机器人 TCP 的
方向设定了一个硬限制。了解更多详情,请参阅 10.12 。
• 安全 I/O 子选项卡指的是可配置输入和输出的安全功能(请参阅 13.2)。例如,
紧急停机可配置为一个输入端。了解更多详情,请参阅 10.13 。
10.2 更改安全配置
安全配置设置只能根据集成商执行的风险评估来更改。
建议的安全配置更改程序如下:
1. 确保更改符合集成商执行的风险评估。
2. 将安全设置调整到集成商执行的风险评估所定义的适当水平。
3. 确认安全设置已应用。
4. 将下面这段话记录在操作员的手册中:“在靠近机器人作业前,确保安全配置
符合预期。这可以通过 检查 PolyScope 右上角的校验和等方式进行验证(参
见 PolyScope 手册中的 10.5)。”
10.3 安全同步和错误
所应用的安全配置的状态与 GUI 加载的机器人安装的比较,通过屏幕左侧安全文本
旁边的盾形图标表示。这些图标便于快速指示当前状态。图标的定义如下:
配置已同步: 表明 GUI 安装与当前应用的安全配置相同。没有进行过任何更
改。
配置已更改: 表明 GUI 安装与当前应用的安全配置不同。
在编辑安全配置时,盾形图标将指示您是否应用了当前设置。
如果安全选项卡中有任何文本字段包含无效输入,安全配置将处于错误状态。指示
错误状态的方式很多:
1. 屏幕左侧的安全文本旁边显示红色错误图标。
2. 包含有错误的子选项卡的顶部标有红色错误图标。
3. 包含有错误的文本字段标记为红色背景。
CB3 II-4 版本 3.2 (rev. 18629).
.
版权所有 ©2009-2015 Universal Robots A/S。保留所有权利。