00191370-02.pdf - 第22页
1 Introduction, Caractéristiques techniques Manuel d’utilisation HS-50 1.4 Aperçu des différentes éditions Version du logiciel S R.501.xx Edition 12/99 FR 22 t I I t 1.4 Ape rçu de s différente s éditi ons 1 1.4.1 V ue d…
Manuel d’utilisation HS-50 1 Introduction, Caractéristiques techniques
Version du logiciel SR.501.xx Edition 12/99 FR 1.3 Classification des utilisateurs
21
t IIt
1.3 Classification des utilisateurs
Le logiciel du système d’exploitation est structuré de telle façon que certaines fonctions ou menus
ne peuvent être soumises à application ou appelés que par le personnel dûment formé. A diffé-
rencier entre les catégories suivantes: 1
– opérateurs,
– régleurs et
– techniciens de maintenance.
L’accès à chaque catégorie est protégé par un mot de passe. Les bas de page des chapitres,
contenant des informations adressées aux catégories d’utilisateur d’ordre supérieur à celle de
"l’opérateur", comportent une mention sur la catégorie d’utilisateur concernée. 1
L’opérateur 1
Les personnes, ayant été initiées à la commande de la machine, font partie de la catégorie des
opérateurs. Ces personnes peuvent mettre les fonctions de commande de la machine à exécu-
tion, respectivement appeler les menus appropriés à la commande de la machine. 1
Le régleur 1
Le régleur a participé à des stages spéciaux; il est autorisé à effectuer des travaux de réglage,
tels que l’élaboration de configurations équipement, définition de paramètres afférents au sys-
tème Vision, etc. 1
Le technicien de maintenance 1
Cette catégorie est réservée aux techniciens de Siemens. Ces techniciens sont dûment formés
et initiés aux travaux de maintenance ainsi qu’à la reconfiguration et configuration complémen-
taire de la machine automatique de report. 1
AVERTISSEMENT
Aucune tâche ne peut être accomplie sur la machine sans connaissance approfondie du chapitre
correspondant de ce manuel d’utilisateur. Seul le personnel concerné, formé et qualifié, est auto-
risé à accomplir une tâche sur la machine. Respecter absolument les instructions libellées sous
les signes d’avertissement, de prudence et de danger. 1
NOTE: Nous vous signalons que le contenu de ce manuel d’utilisation ne fait ni partie d’une con-
vention et/ou d’un engagement ultérieur ou actuel ou d’une situation juridique, ni d’une telle ou
d’un tel devant le modifier. L’ensemble des obligations de la Sté Siemens AG découle du contrat
d’achat correspondant qui contient également des garanties complètes et de type générales. Ces
dispositions contractuelles ne sont ni étendues, ni limitées par le texte de ce manuel d’utilisation.1
1 Introduction, Caractéristiques techniques Manuel d’utilisation HS-50
1.4 Aperçu des différentes éditions Version du logiciel SR.501.xx Edition 12/99 FR
22
t IIt
1.4 Aperçu des différentes éditions
1
1.4.1 Vue d’ensemble des modifications de l’édition 12/1999
1
Manuel Version du logiciel Edition
Ebauche Manuel d’utilisation provisoire HS-50
5.01 09/98
Révision du Manuel d’utilisation HS-50
5.01 01/99
Révision du Manuel d’utilisation HS-50
5.01.03 12/99
Nouveau ou modifié Chapitre/Section
SIPLACE sur le World-Wide-Web (WWW)
1.1.3
Caractéristiques techniques - Charges de connexion électrique 1.7.2
Caractéristiques techniques - Dimensions, poids 1.9.2
Gravité de la machine automatique de report 1.9.3
Alimentation électrique 1.10.5
Caractéristiques techniques - Double convoyeur 1.15.3
Triangles de sécurité apposés sur la machine automatique de report 2.1.5
Consignes de sécurité sur la modification de la hauteur des tables de changement
des composants
2.1.9
Etat d’énergie de la machine après avoir éteint l’interrupteur principal 2.5
Icônes rangées dans la fenêtre de document ou zone d’affichage 3.2.2.1
Affichage du statut de l’interface du convoyeur 3.2.2.3
Menu "Options" 3.3.2.3
Menu "Langue" 3.3.2.4
Ecran " Erreurs de pistes emplacement X " 4.2.3
Ecran " Omettre des composants " 4.3.2
Option "régler tableau 5" 6.5.5.2
Option "tableau ..." 6.6.4.12
Séquence optimale recommandée des méthodes de mesure 6.6.4.15
Mode de mesure "Size" 6.6.4.16
Mode de mesure "Row" 6.6.4.17
Mode de mesure "Corner" 6.6.4.18
Géométries et méthodes de mesure possibles pour un centrage approximatif (G) et
un centrage précis (F)
6.7.3
Module S pour bandes de 12/16 mm 10.2.3
Convoyeur asynchrone 11.3.4
Caractéristiques techniques du double convoyeur 11.3.7
Manuel d’utilisation HS-50 1 Introduction, Caractéristiques techniques
Version du logiciel SR.501.xx Edition 12/99 FR 1.5 Description de la machine
23
t IIt
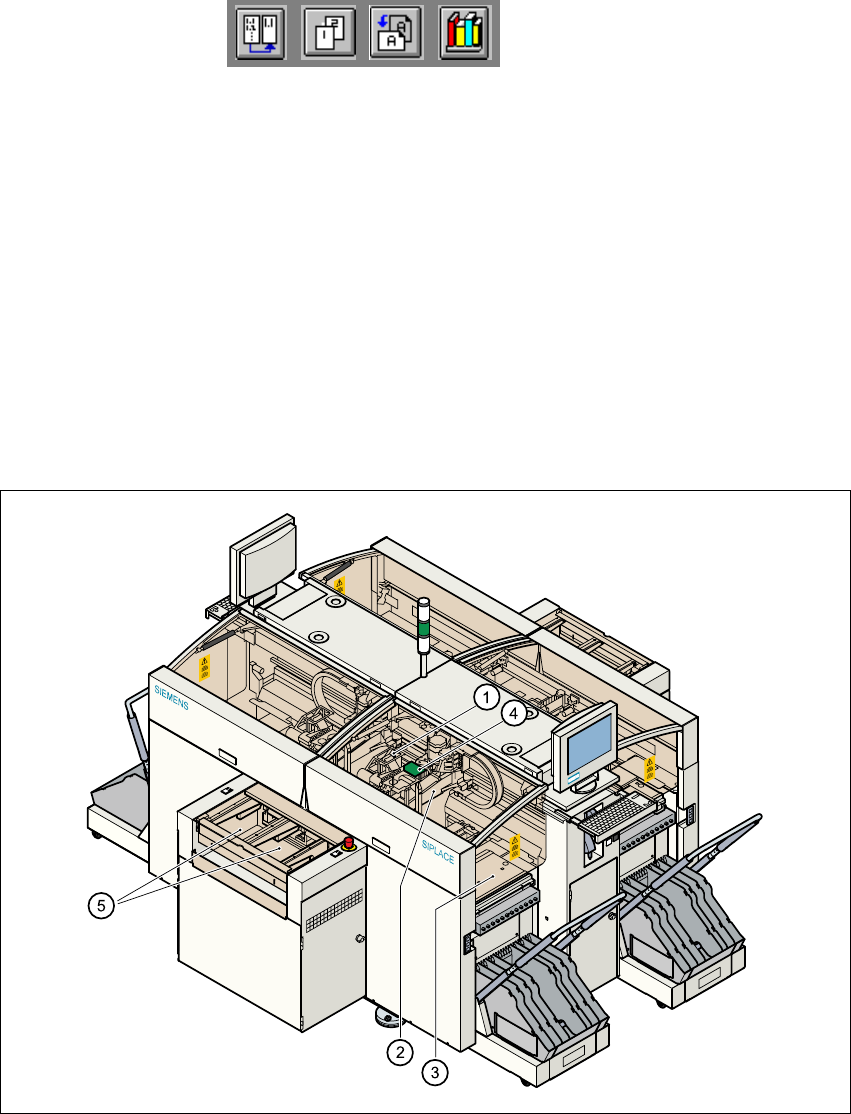
1.5 Description de la machine
1.5.1 Description fonctionnelle
La machine automatique de report est une machine de placement modulaire très performante, do-
tée de quatre systèmes d’axe de portique. Un système de reconnaissance optique des PCB et
une tête revolver 12 buses en forme d’étoile sont montés sur chaque portique. Les têtes revolver,
équipées d’un système de reconnaissance optique des composants, prélèvent les composants
(comp.) des modules de distribution stationnaires et les reportent sur les PCB serrés sur le con-
voyeur. 1
1
Fig. 1.5 - 1 Description fonctionnelle de la machine automatique de report
(1)Tête revolver de report à 12 buses/DLM1 équipée d’une caméra de reconnaissance optique
des composants
(2)Système d’axe de portique avec caméra de reconnaissance optique des PCB
(3)Dispositif de distribution stationnaire des composants
(4)PCB serré
(5)Convoyeur (en option: double convoyeur)