00191370-02.pdf - 第43页
Manuel d’utilisation HS-50 1 Introduction, Caractéristiques techniques Version du logiciel SR.501.xx Edition 12/99 FR 1.13 Vue d’ensemble du sous-groupe - Tête revolver 43 t I I t 1.13 V ue d’ ensemble du sous-gro upe - …
1 Introduction, Caractéristiques techniques Manuel d’utilisation HS-50
1.12 Vue d’ensemble du sous-groupe - Portiques Version du logiciel SR.501.xx Edition 12/99 FR
42
t IIt
L’axe Y se compose essentiellement des sous-groupes principaux suivants: 1
– Entraînement linéaire en Y avec aimant permanent (1) et plaque adaptatrice (2)
– Système de guidage en Y
– Système de mesure en Y
1
L’axe Y est entraîné par un moteur électrique linéaire. La partie secondaire de son entraînement,
se composant d’aimants permanents, est montée sur le bâti de la machine. La partie primaire est
vissée sur le portique (plaque adaptatrice). Un circuit anti-collision limite les courses réciproque
des portiques. 1
1.12.5 Caractéristiques techniques de l’axe Y
Entraînement direct, à l’aide d’un moteur électrique linéaire
Vitesse maxi 2,5 m/sec.
Course des portiques,
calculée du centre de la machine:
portique 1 - 688,5 mm
portique 2 - 768,5 mm
portique 3 - 688, 5 mm
portique 4 - 768,5 mm
Transducteur de position règles linéaires métalliques
Longueur des règles linéaires 1530 mm
Résolution 1 µm
Manuel d’utilisation HS-50 1 Introduction, Caractéristiques techniques
Version du logiciel SR.501.xx Edition 12/99 FR 1.13 Vue d’ensemble du sous-groupe - Tête revolver
43
t IIt
1.13 Vue d’ensemble du sous-groupe - Tête revolver
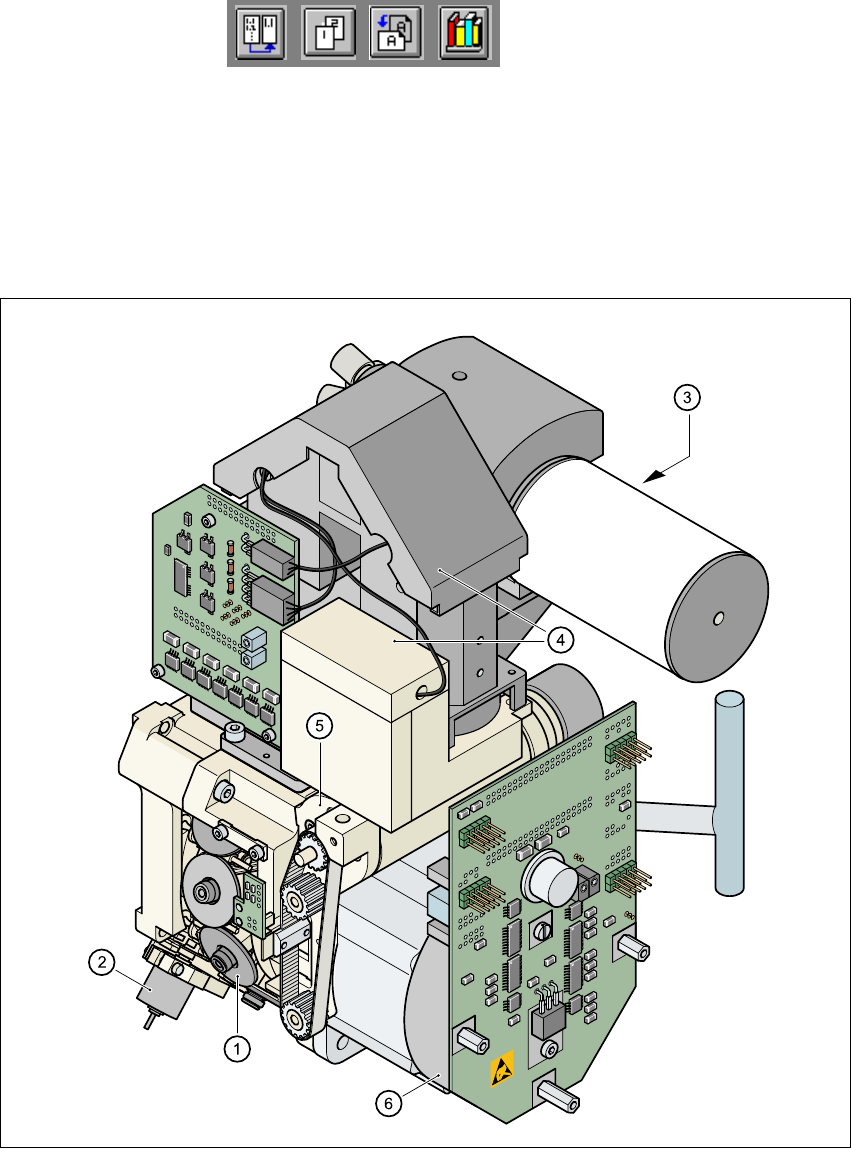
1.13.1 Constitution de la tête revolver 12 buses
1
Fig. 1.13 - 1 Constitution de la tête revolver 12 buses
1
(1) Barillet équipé de 12 fourreaux (2) Servomoteur asservissant la soupape "rejet"
(3) Poste de rotation (4) Système Vision des composants
(5) Entraînement de l’axe Z (6) Moteur en étoile
1 Introduction, Caractéristiques techniques Manuel d’utilisation HS-50
1.13 Vue d’ensemble du sous-groupe - Tête revolver Version du logiciel SR.501.xx Edition 12/99 FR
44
t IIt
Tous les composants sont reportés d’après le même temps de cycles. Avant d’être reporté, le
composant est mesuré opto-électroniquement à l’aide du système Vision. 1
– La caméra de reconnaissance optique des composants reproduit le tracé du composant
prélevé.
– La position exacte du composant est également définie.
– La forme du boîtier du composant prélevé est comparée à la forme de boîtier programmée,
afin d’identifier le composant. Les composants non identifiés sont rejetés.
– Le poste de rotation tourne le composant dans la position de report exigée.
1.13.2 Description de la tête revolver 12 buses
– La tête revolver 12 buses fonctionne d’après le principe de Collect & Place (prendre et placer),
c-à-d. que les composants sont prélevés par les pipettes sous l’action d’une dépression et en-
suite déposés doucement et exactement sur le PCB sous l’action d’air d’expulsion, après avoir
parcouru un cycle de prise complet.
– Le mode de tamponnage des capteurs "adaptatif" de l’axe Z égalise les inégalités du PCB lors
de la dépose des composants.
– Les composants défectueux sont rejetés et reportés au cours d’un cycle de réparation.
1.13.3 Caractéristiques techniques - Tête revolver
Gamme des composants
0402 à PLCC44, y compris BGA, µBGA, Flip-Chip,
TSOP, QFP, PLCC, SO à SO32, DRAM
Epaisseur maxi des composants 6 mm
Trame mini des pattes 0,5 mm
Dimensions mini 0,5 mm x 1,0 mm
Dimensions maxi 18,7 mm x 18,7 mm
Poids maxi 2 g
Course maxi de l’axe Z 16 mm
Force de pose programmable 2,4 à 5,0 N
Types de pipette série 9xx
Cadence de report suivant Benchmark 12.500 comp./h
Précision angulaire 0,7°à 4 sigma
Précision de report
± 90 µm à 4 sigma
± 135 µm à 6 sigma