00191370-02.pdf - 第41页
Manuel d’utilisation HS-50 1 Introduction, Caractéristiques techniques Version du logiciel SR.501.xx Edition 12/99 FR 1.12 Vue d’ensemble du sous-groupe - Portiques 41 t I I t 1.12.3 Car actéristiques techniques de l’axe…
1 Introduction, Caractéristiques techniques Manuel d’utilisation HS-50
1.12 Vue d’ensemble du sous-groupe - Portiques Version du logiciel SR.501.xx Edition 12/99 FR
40
t IIt
1.12.2 Constitution de l’axe X
1
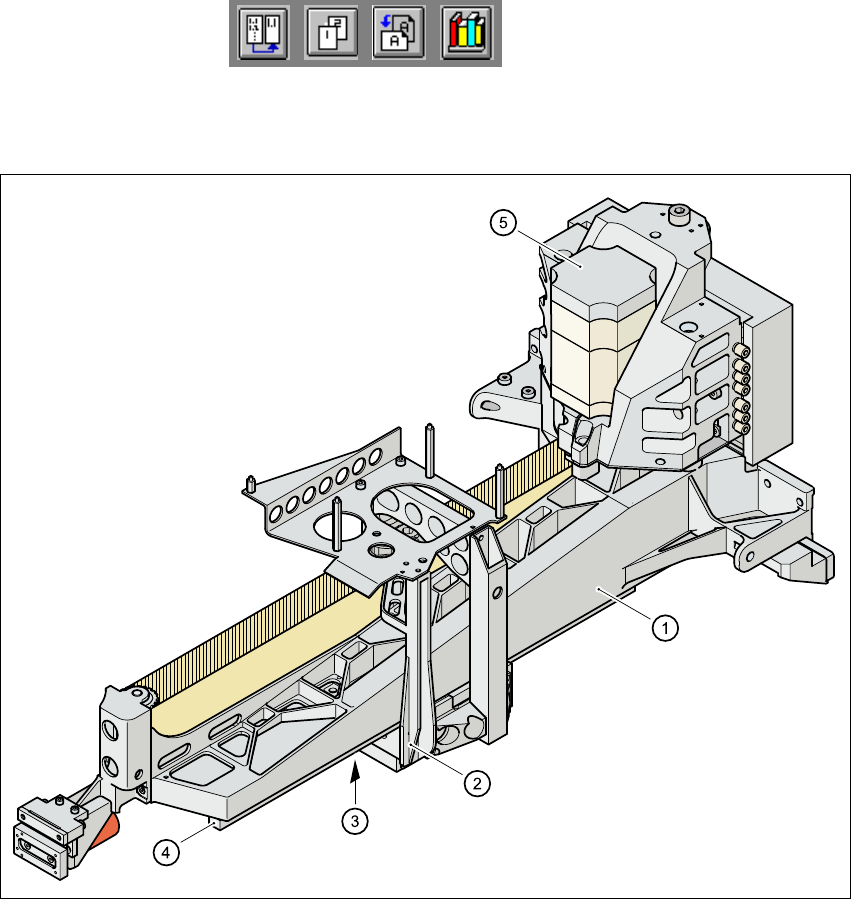
Fig. 1.12 - 2 Constitution de l’axe X
L’axe X se compose essentiellement des sous-groupes principaux suivants: 1
– Flèche du portique (1)
– Support de la tête de report (2)
– Système de mesure linéaire (3)
– Système de guidage en X(4)
– Servo-moteur à courant triphasé de l’axe X (5)
Le support de la tête de report acceuille les composantes suivantes: 1
– Caméra sous portique (caméra de reconnaissance optique des PCB faisant partie du sys-
tème Vision des PCB)
– Carte-pilote de la tête de report
– Tête manométrique du système de mesure de l’axe X
– Tête revolver
Manuel d’utilisation HS-50 1 Introduction, Caractéristiques techniques
Version du logiciel SR.501.xx Edition 12/99 FR 1.12 Vue d’ensemble du sous-groupe - Portiques
41
t IIt
1.12.3 Caractéristiques techniques de l’axe X
1
1.12.4 Constitution de l’axe Y
1
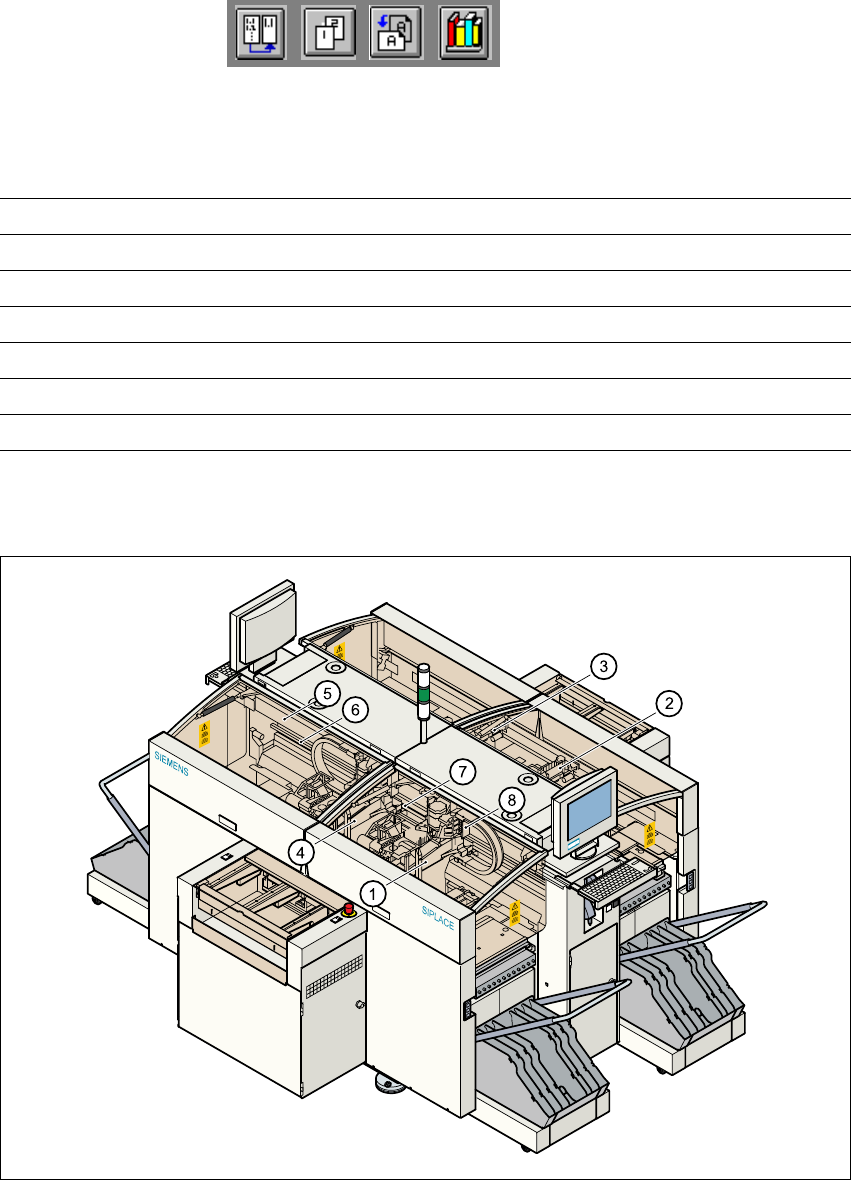
Fig. 1.12 - 3 Constitution de l’axe Y
1
Entraînement Servo-moteur à courant triphasé/courroie dentée
Vitesse maxi 2,5 m/sec.
Course 375 mm
Transducteur de position Règle graduée linéaire métallique
Longueur mesurée 400 mm
Longueur de la règle graduée 420 mm
Résolution 1 µm
(1) Portique 1 (2) Portique 2
(3) Portique 3 (4) Portique 4
(5) Aimant permanent (6) Système de guidage
(7) Système de mesure (8) Plaque d’adaptation
1 Introduction, Caractéristiques techniques Manuel d’utilisation HS-50
1.12 Vue d’ensemble du sous-groupe - Portiques Version du logiciel SR.501.xx Edition 12/99 FR
42
t IIt
L’axe Y se compose essentiellement des sous-groupes principaux suivants: 1
– Entraînement linéaire en Y avec aimant permanent (1) et plaque adaptatrice (2)
– Système de guidage en Y
– Système de mesure en Y
1
L’axe Y est entraîné par un moteur électrique linéaire. La partie secondaire de son entraînement,
se composant d’aimants permanents, est montée sur le bâti de la machine. La partie primaire est
vissée sur le portique (plaque adaptatrice). Un circuit anti-collision limite les courses réciproque
des portiques. 1
1.12.5 Caractéristiques techniques de l’axe Y
Entraînement direct, à l’aide d’un moteur électrique linéaire
Vitesse maxi 2,5 m/sec.
Course des portiques,
calculée du centre de la machine:
portique 1 - 688,5 mm
portique 2 - 768,5 mm
portique 3 - 688, 5 mm
portique 4 - 768,5 mm
Transducteur de position règles linéaires métalliques
Longueur des règles linéaires 1530 mm
Résolution 1 µm