3D+AOI软件编程手册_20201204.pdf - 第14页
第二章 工作原理 V 7.0.4584.0-2 www .jutze. com.cn 14 / 136 2.4 定位 方式 2.4.1 三重定 位方式 2.4.1.1 通过 导入 CAD 得到 Mark 与元 件本体框相对 应位置关系 ; 2.4.1.2 通过 焊盘定位,准 确定位目标元 件所在焊盘位 置; 2.4.1.3 通过 本体定位,准 确定位实际元 件所在位置。 二维图像定 位 三维高度定 位 注意: 以上三者存在相对 位置关系…
第二章 工作原理 V 7.0.4584.0-2
www.jutze.com.cn 13
/
136
2.3 三维测算原理
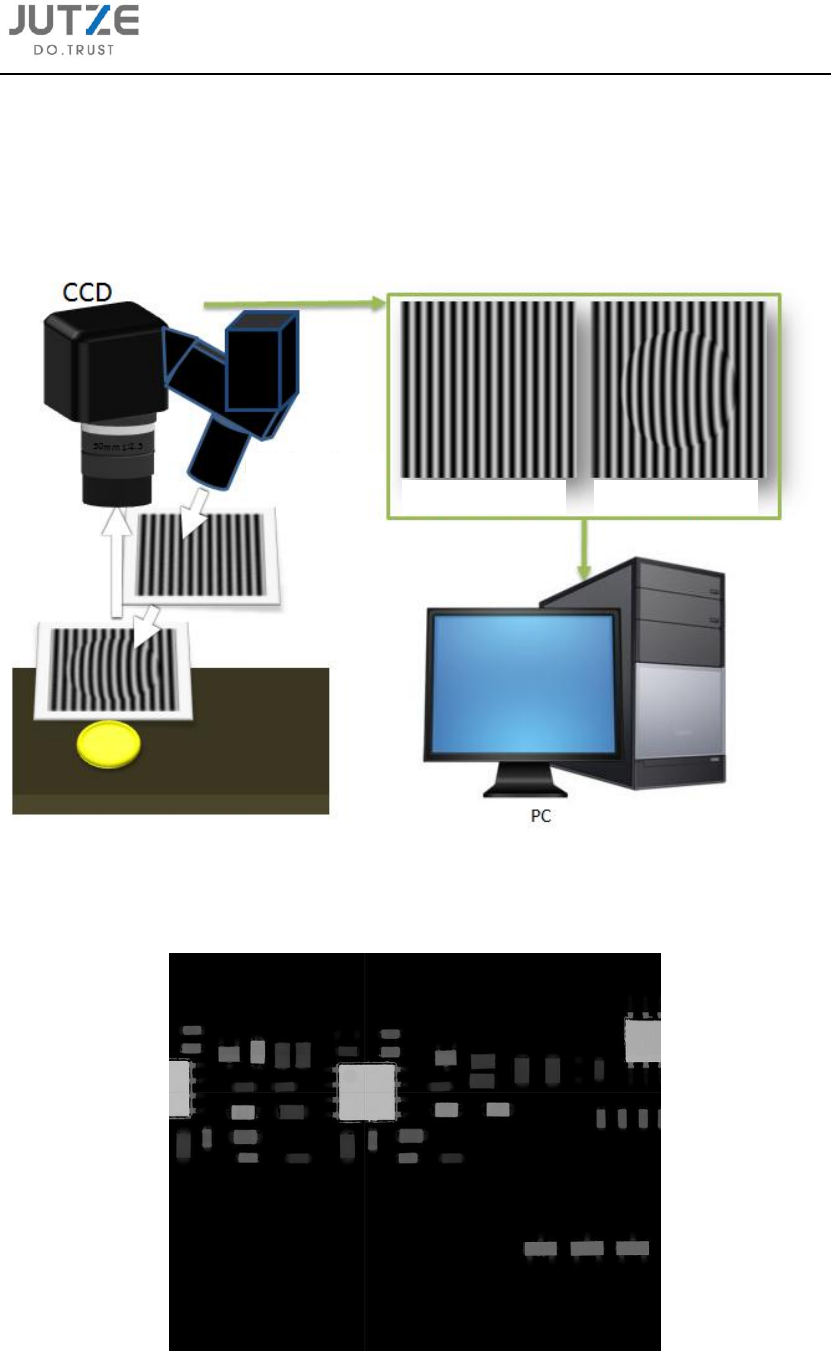
2.3.1 数字光栅投影法
通过设备配备的多个不同方位的投影仪将条纹图像(数字光栅)投射到待测物体表面,受物体高
度的调制,条纹发生变形,变形条纹被相机采集并存储为图像后,经计算机处理可得到调制相位
主值。对该调制相位进行解析,可得到物体的高度信息。
平面上投射的条纹
曲面上投射的条纹
数字投影仪
2.3.2 高度信息表述
通过灰阶的转换,同一幅图像中的不同高度信息以灰度的明暗来表述。
第二章 工作原理 V 7.0.4584.0-2
www.jutze.com.cn 14
/
136
2.4 定位方式
2.4.1 三重定位方式
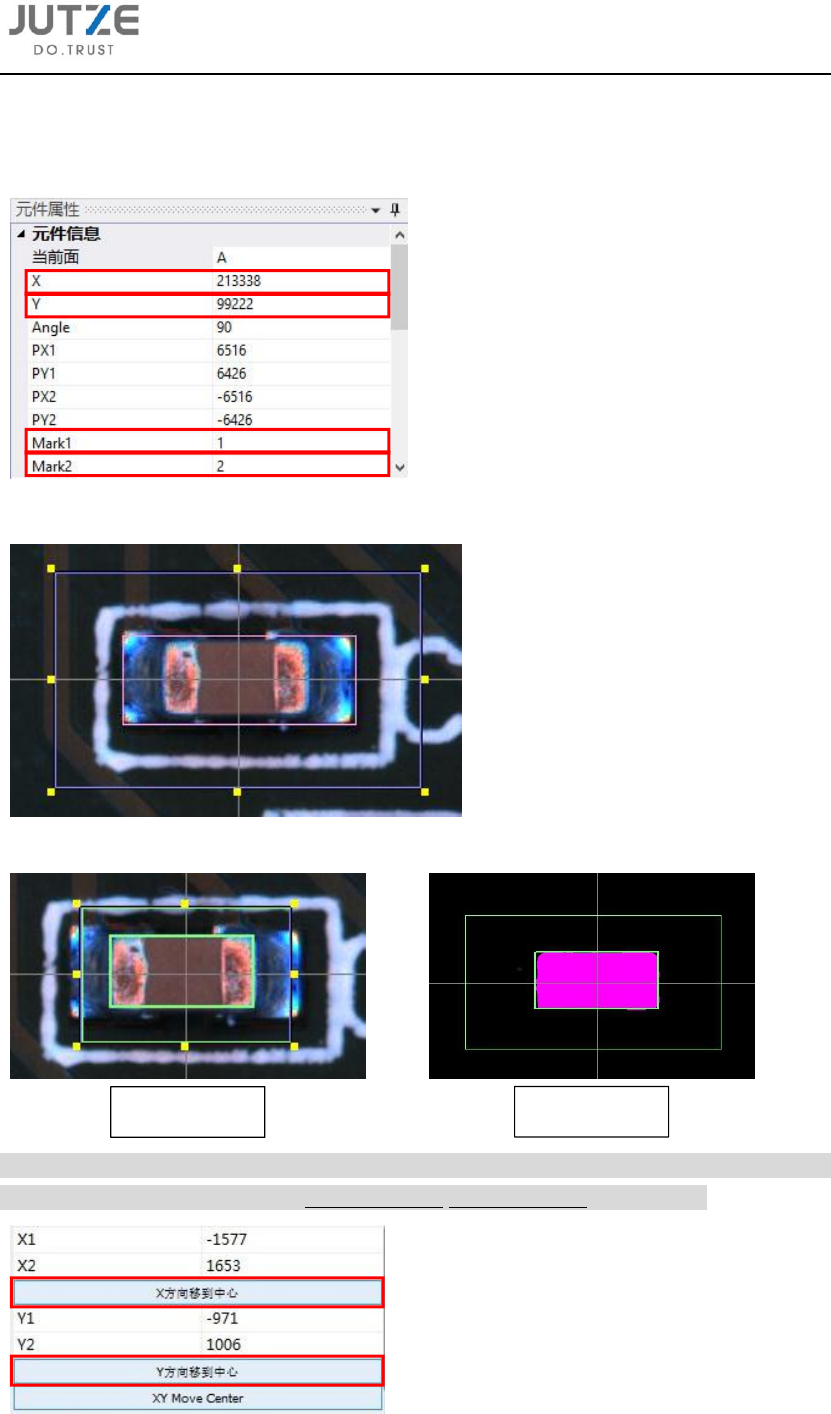
2.4.1.1 通过导入 CAD 得到 Mark 与元件本体框相对应位置关系;
2.4.1.2 通过焊盘定位,准确定位目标元件所在焊盘位置;
2.4.1.3 通过本体定位,准确定位实际元件所在位置。
二维图像定位
三维高度定位
注意:以上三者存在相对位置关系,在实际编程过程中,焊盘和本体的定位坐标系一定要位于本
体框的中心。如不在中心,需点击
X
方向移到中心
/Y
方向移到中心,进行调整。
第二章 工作原理 V 7.0.4584.0-2
www.jutze.com.cn 15
/
136
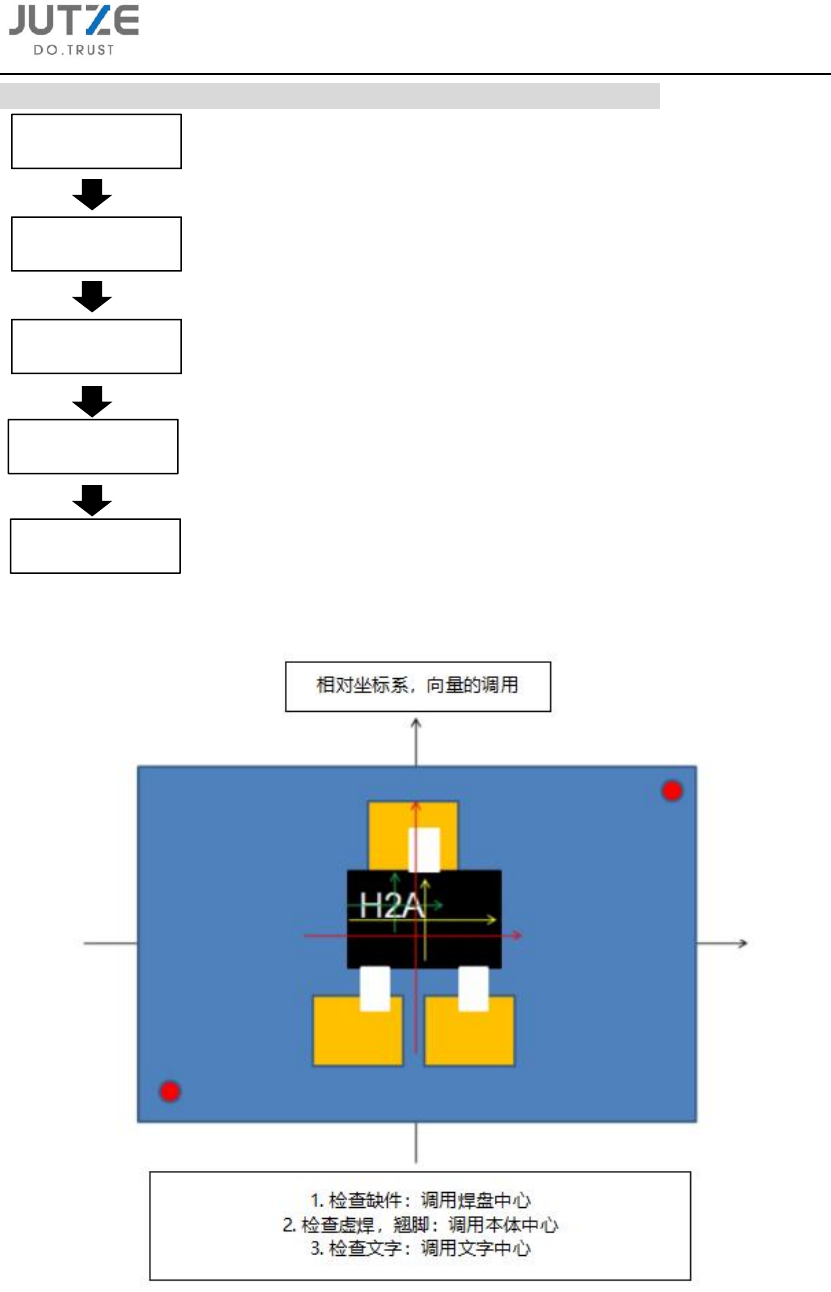
注意:这样的定位方式也决定了程序和元件资料库编写的顺序。(如下图)
导入 CAD
制作 Mark
焊盘定位
检测窗口
2.4.2 向量的调用
本体定位