NXTIII 编程手册.pdf - 第232页
PRG-NXTS-004S0 3. 元件数据 NXT 系列 编程手册 219 VT 180 ( 185) 钽电容器处理, SOT 类型元件处理 可以用于引脚数量为 2 到 6 根并且影像处理中 只可看见引脚的黑色主体元件。 必须输入元件 主体尺寸和要素 信息。VT180 时,元件基 准点是元件主体中心 ,VT185 时,元件基准点是 元 件中心。 备注 )该影像类型可以用于引脚最多为 6 根的元件。无法对有 7 根以上引脚的元件执行影像…

3. 元件数据 PRG-NXTS-004S0
218 NXT 系列 编程手册
VT 170 使用机械夹头时的元件有无检查处理
这个影像类型用于不能使用其他影像类型识别的元件。在外形数据中,将影像类型设定为
170,指定 [Lead Brightness] 设定,指定检查区,然后在要素信息中选择 P 类型。根据该
数据判定,如果已经吸取了元件,则将不根据影像对元件进行任何修正就进行贴装。机械化
地定位元件。
执行影像处理后将决定在要素数据中指定的平均灰度。该平均值与引脚亮度设定进行比较,
再根据 P 类型设定来判断是否存在元件。
如果 P 类型设定是 1 (暗)并且平均灰度高于引脚亮度设定,这说明存在元件。如果平均灰
度低于引脚亮度设定,这说明不存在元件。
如果 P 类型设定为 2 (亮)并且平均灰度低于引脚亮度设定,这说明存在元件。如果平均灰
度高于引脚亮度设定,这说明不存在元件。
备注 )使用该影像类型时需要使用带有四个爪的机械爪。
PRG-NXTS-004S0 3. 元件数据
NXT 系列 编程手册 219
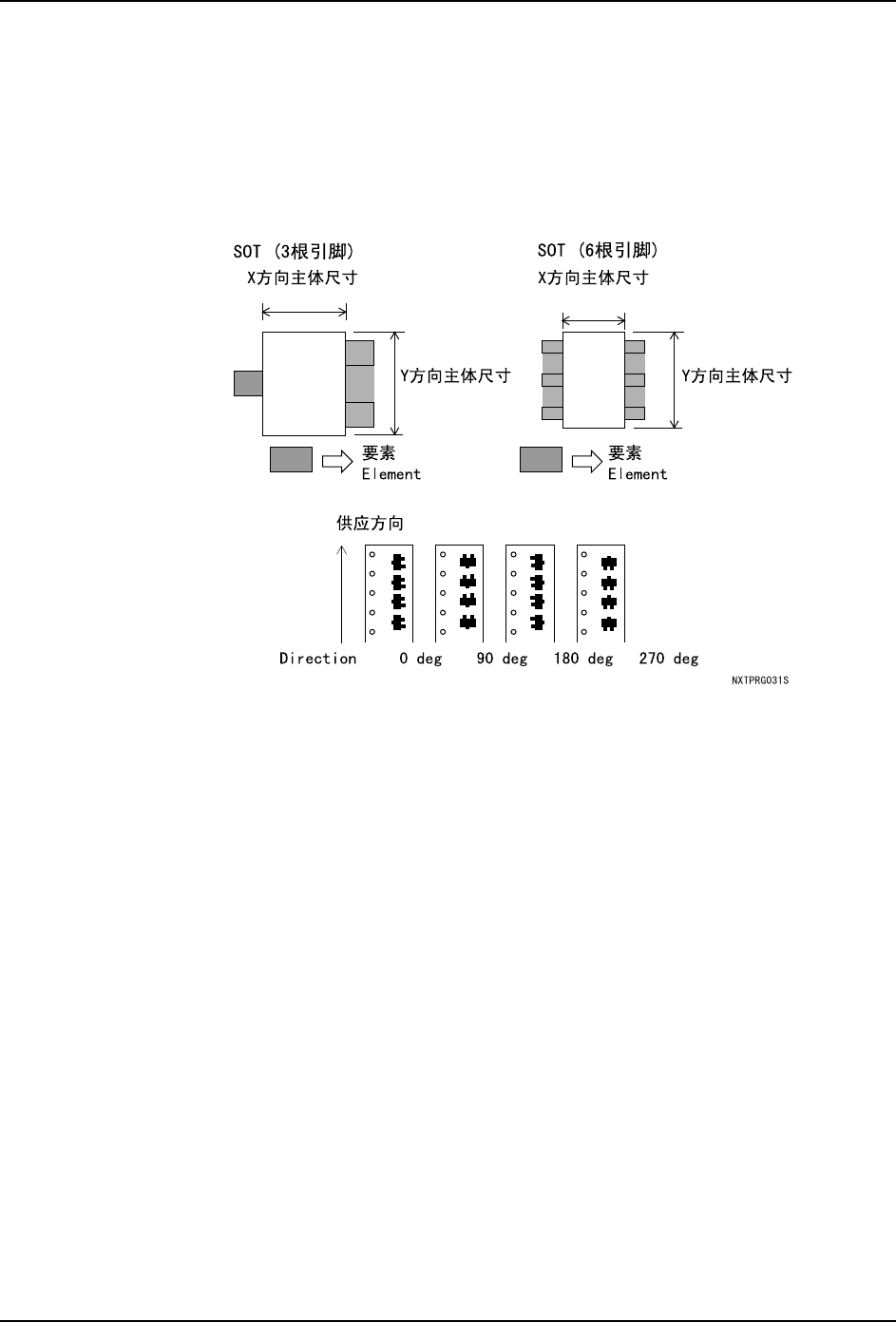
VT 180 (185) 钽电容器处理,SOT 类型元件处理
可以用于引脚数量为 2 到 6 根并且影像处理中只可看见引脚的黑色主体元件。必须输入元件
主体尺寸和要素信息。VT180 时,元件基准点是元件主体中心,VT185 时,元件基准点是元
件中心。
备注 )该影像类型可以用于引脚最多为 6 根的元件。无法对有 7 根以上引脚的元件执行影像
处理。
备注 )如果引脚对光的反射不均匀,则无法执行影像处理。
3. 元件数据 PRG-NXTS-004S0
220 NXT 系列 编程手册
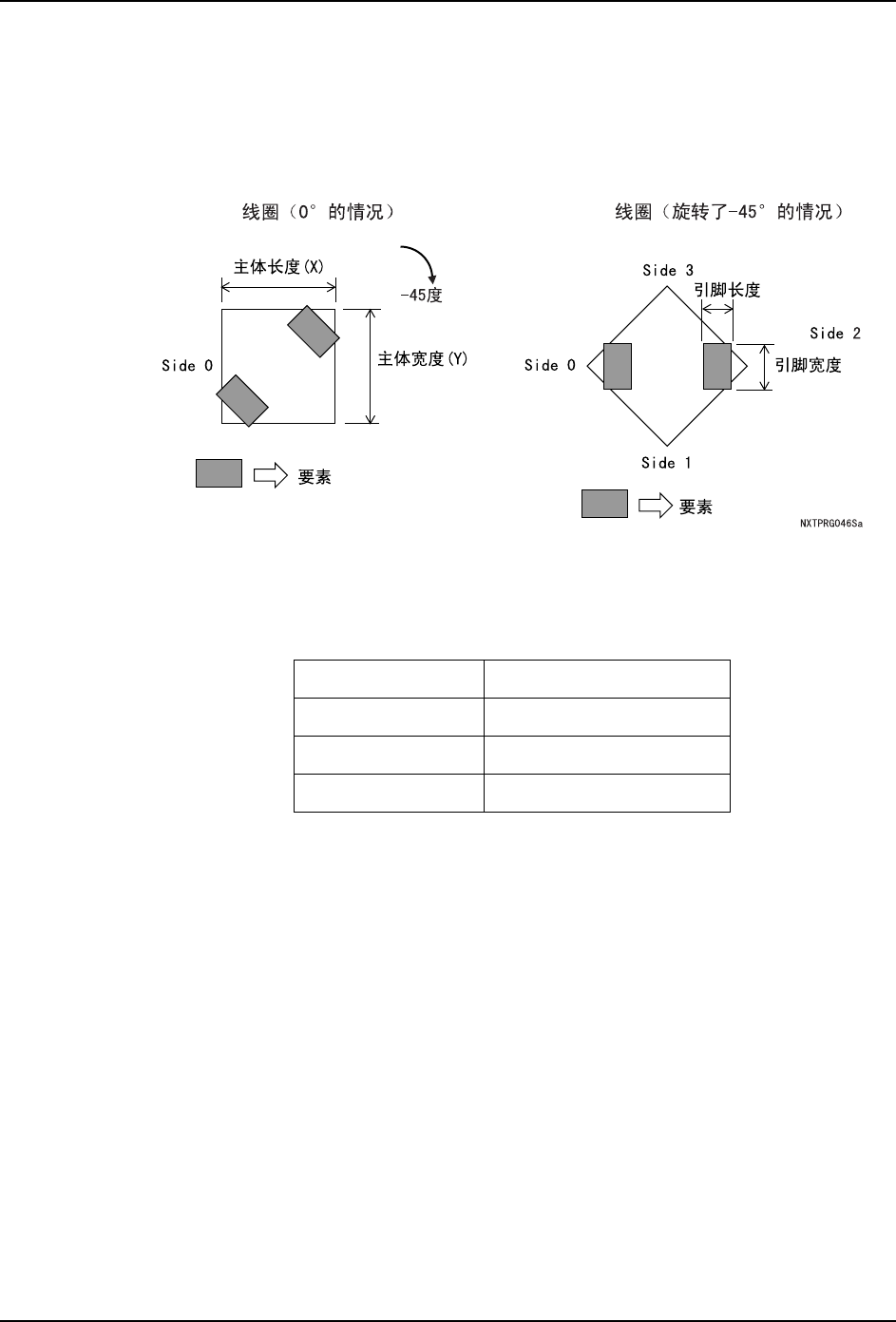
VT 181 线圈元件处理 (45 度方向上有 2 根引脚的元件)
该影像类型用于在X轴45度角方向上有两根引脚的线圈元件。
需要输入以下元件主体尺寸和 Element Information。
· 必须把引脚要素定义为 “Side 0” 和 “Side 2”。
· 对于每个要素,将引脚数量定义为 [1]。
Vision Type 210 (215) 多锡球元件处理
进行多锡球元件的影像处理时,使用现有算法时比较花费时间,可以通过新的影像处理算
法缩短影像处理时间。
多锡球元件处理时,外形影像处理和锡球识别影像处理可以分别设定不同的曝光时间和光
源类型。
请在外形数据的 [Shape Process] - [Vision] 上的 [Exposure Time for Bump(VPDplus)]
和 [Lighting Pattern for Bump(VPDplus)] 进行设定。
锡球识别影像处理的曝光时间和光源类型的编辑请通过 VPDplus 进行。详细方法请参照
"VPDplus 操作手册 "。
VT 230 (235) 黑色主体 BGA 处理
VT 231 (236) 白色主体 BGA 处理
VT 233 (238) 黑色主体 CSP 处理
VT 234 (239) 白色主体 CSP 处理
在元件数据中输入元件主体尺寸和 Element Information 。VT230,231,233 和 234 是以
元件主体中心进行影像处理。VT235,236,237 和 238 是以元件中心进行影像处理。
由于使用前光,所以可能因为引脚外形和光源状态导致球形栅格出现波动。在这种情况下,
需要对要素信息中引脚的位置、宽度和长度进行调整。
对象工作头 H01, H02(F)
对应相机 MP03, MP05, MP05CL
推荐锡球直径 0.3mm 以下
对应锡球数 2 个 - 512 个